












Electrical Engineering (EE) Exam > Electrical Engineering (EE) Questions > Torques developed by a split phase motor is p... Start Learning for Free
Torques developed by a split phase motor is proportional to
- a)Sine of angle between Im and Is
- b)Cosine of angle between Im and Is
- c)Main winding current Is
- d)Auxiliary winding current Is
Correct answer is option 'A'. Can you explain this answer?

Verified Answer
Torques developed by a split phase motor is proportional toa)Sine of a...
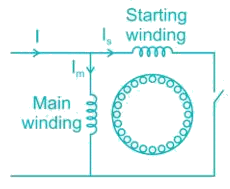
A split-phase motor has no capacitance in the auxiliary circuit. A phase shift with respect to the main current is achieved by using narrow conductors to achieve a high resistance to reactance ratio.
Increasing the resistance means that the auxiliary winding can only be used during starting, otherwise, it would overheat.
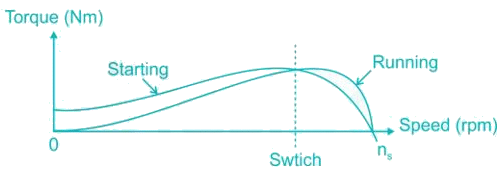
A split-phase motor has significantly lower torque at starting than any of the capacitor motors due to the reduced phase angle between main and starting winding currents.
Torques developed by a split phase motor is proportional to sine of angle between Im and Is
Most Upvoted Answer
Torques developed by a split phase motor is proportional toa)Sine of a...
Introduction:
In split phase motors, the torque developed is proportional to the sine of the angle between the main winding current (Im) and the auxiliary winding current (Is). This relationship can be understood by considering the working principle of a split phase motor.
Working Principle of Split Phase Motor:
A split phase motor is a type of single-phase induction motor that has two windings - the main winding and the auxiliary winding. These windings are spatially displaced from each other, resulting in a phase difference between the currents flowing through them.
When the motor is powered, a rotating magnetic field is created by the interaction of the currents in the main and auxiliary windings. This rotating magnetic field induces a torque on the rotor, causing it to rotate.
Torque Development:
The torque developed in a split phase motor is directly influenced by the phase difference between the main and auxiliary windings. This phase difference is determined by the angle between the currents flowing through the windings.
Sine of the Angle between Im and Is:
The sine function relates the angle of a right-angled triangle to the ratio of the lengths of its sides. In the case of a split phase motor, the angle between Im and Is corresponds to the phase difference between the main and auxiliary windings.
The torque developed in a split phase motor is directly proportional to the sine of the angle between Im and Is. This means that as the angle increases, the torque also increases. When the angle is zero, the torque is at its minimum value.
Explanation:
The torque developed in a split phase motor can be calculated using the formula:
T = K * sin(θ)
Where:
T = Torque developed
K = Constant of proportionality
θ = Angle between Im and Is
The sine function ensures that the torque varies sinusoidally with the angle between the currents. This relationship is crucial for the proper functioning of the split phase motor.
Conclusion:
In conclusion, the torque developed by a split phase motor is directly proportional to the sine of the angle between the main winding current (Im) and the auxiliary winding current (Is). This relationship is a result of the working principle of the split phase motor and is essential for the motor's proper operation.
In split phase motors, the torque developed is proportional to the sine of the angle between the main winding current (Im) and the auxiliary winding current (Is). This relationship can be understood by considering the working principle of a split phase motor.
Working Principle of Split Phase Motor:
A split phase motor is a type of single-phase induction motor that has two windings - the main winding and the auxiliary winding. These windings are spatially displaced from each other, resulting in a phase difference between the currents flowing through them.
When the motor is powered, a rotating magnetic field is created by the interaction of the currents in the main and auxiliary windings. This rotating magnetic field induces a torque on the rotor, causing it to rotate.
Torque Development:
The torque developed in a split phase motor is directly influenced by the phase difference between the main and auxiliary windings. This phase difference is determined by the angle between the currents flowing through the windings.
Sine of the Angle between Im and Is:
The sine function relates the angle of a right-angled triangle to the ratio of the lengths of its sides. In the case of a split phase motor, the angle between Im and Is corresponds to the phase difference between the main and auxiliary windings.
The torque developed in a split phase motor is directly proportional to the sine of the angle between Im and Is. This means that as the angle increases, the torque also increases. When the angle is zero, the torque is at its minimum value.
Explanation:
The torque developed in a split phase motor can be calculated using the formula:
T = K * sin(θ)
Where:
T = Torque developed
K = Constant of proportionality
θ = Angle between Im and Is
The sine function ensures that the torque varies sinusoidally with the angle between the currents. This relationship is crucial for the proper functioning of the split phase motor.
Conclusion:
In conclusion, the torque developed by a split phase motor is directly proportional to the sine of the angle between the main winding current (Im) and the auxiliary winding current (Is). This relationship is a result of the working principle of the split phase motor and is essential for the motor's proper operation.
 | Explore Courses for Electrical Engineering (EE) exam |
Top Courses for Electrical Engineering (EE)View all

Top Courses for Electrical Engineering (EE)
Question Description
Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? for Electrical Engineering (EE) 2026 is part of Electrical Engineering (EE) preparation. The Question and answers have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? covers all topics & solutions for Electrical Engineering (EE) 2026 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer?.
Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? for Electrical Engineering (EE) 2026 is part of Electrical Engineering (EE) preparation. The Question and answers have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? covers all topics & solutions for Electrical Engineering (EE) 2026 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer?.
Solutions for Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? in English & in Hindi are available as part of our courses for Electrical Engineering (EE). Download more important topics, notes, lectures and mock test series for Electrical Engineering (EE) Exam by signing up for free.
Here you can find the meaning of Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? defined & explained in the simplest way possible. Besides giving the explanation of Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer?, a detailed solution for Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? has been provided alongside types of Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? theory, EduRev gives you an ample number of questions to practice Torques developed by a split phase motor is proportional toa)Sine of angle between Imand Isb)Cosine of angle between Imand Isc)Main winding current Isd)Auxiliary winding current IsCorrect answer is option 'A'. Can you explain this answer? tests, examples and also practice Electrical Engineering (EE) tests.
| Explore Courses for Electrical Engineering (EE) exam |
Top Courses for Electrical Engineering (EE)
Explore Courses
Signup for Free!
Signup to see your scores go up within 7 days! Learn & Practice with 1000+ FREE Notes, Videos & Tests.


