












Electrical Engineering (EE) Exam > Electrical Engineering (EE) Questions > What is the full form of PID?a)Proportional I... Start Learning for Free
What is the full form of PID?
- a)Proportional Integral Derivative
- b)Proportional Integral Device
- c)Programmable Integral Device
- d)Programmable Integral Derivative
Correct answer is option 'A'. Can you explain this answer?

Most Upvoted Answer
What is the full form of PID?a)Proportional Integral Derivativeb)Propo...
Understanding PID Control
PID stands for Proportional Integral Derivative, which is a fundamental control mechanism widely used in industrial control systems. Let’s break down the components:
1. Proportional (P)
- The proportional term produces an output value that is proportional to the current error value.
- The main function is to reduce the overall error by adjusting the control output relative to the error.
- A higher proportional gain results in a larger change in the output for a given error.
2. Integral (I)
- The integral term is concerned with the accumulation of past errors.
- It integrates the error over time, thus addressing any residual steady-state error that may remain after the proportional response.
- This helps eliminate the offset that can occur with a purely proportional controller.
3. Derivative (D)
- The derivative term predicts future error based on its rate of change.
- It acts as a damping factor, improving system stability by counteracting the rate of change of the error.
- This helps to reduce overshoot and oscillations in the control response.
Application of PID Controllers
- PID controllers are utilized in various applications, including temperature control, speed control of motors, and pressure control.
- They are favored for their simplicity and effectiveness in providing a stable control response.
In summary, the full form of PID is Proportional Integral Derivative, and each component plays a crucial role in achieving precise control in dynamic systems. This method has become a standard in engineering due to its versatility and reliability.
PID stands for Proportional Integral Derivative, which is a fundamental control mechanism widely used in industrial control systems. Let’s break down the components:
1. Proportional (P)
- The proportional term produces an output value that is proportional to the current error value.
- The main function is to reduce the overall error by adjusting the control output relative to the error.
- A higher proportional gain results in a larger change in the output for a given error.
2. Integral (I)
- The integral term is concerned with the accumulation of past errors.
- It integrates the error over time, thus addressing any residual steady-state error that may remain after the proportional response.
- This helps eliminate the offset that can occur with a purely proportional controller.
3. Derivative (D)
- The derivative term predicts future error based on its rate of change.
- It acts as a damping factor, improving system stability by counteracting the rate of change of the error.
- This helps to reduce overshoot and oscillations in the control response.
Application of PID Controllers
- PID controllers are utilized in various applications, including temperature control, speed control of motors, and pressure control.
- They are favored for their simplicity and effectiveness in providing a stable control response.
In summary, the full form of PID is Proportional Integral Derivative, and each component plays a crucial role in achieving precise control in dynamic systems. This method has become a standard in engineering due to its versatility and reliability.
Free Test
FREE
| Start Free Test |
Community Answer
What is the full form of PID?a)Proportional Integral Derivativeb)Propo...
Proportion + Integral + Derivative (PID):
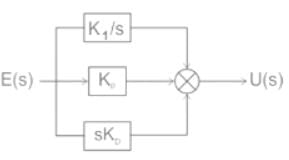
The PID controller produces on output, which is the combination of outputs of proportional, integral, and derivative controllers.
This is defined in terms of differential equations as:

Applying Laplace transform, we get:

Transfer function will be:

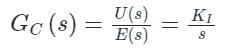
Integral control:

It is the control mode where the controller Output is proportional to the integral of the error with respect to time.
Applying Laplace transform, we get:
Transfer function will be:
Integral control:
It is the control mode where the controller Output is proportional to the integral of the error with respect to time.
Integral controller output = k × integral of error with time, i.e.
Proportional + Derivate:
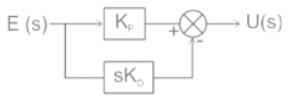
Proportional + Derivate:
The additive combination of proportional & Derivative control is known as P-D control.
Overall transfer function for a PD controller is given by:

It is equivalent to a High-pass filter.
It is equivalent to a High-pass filter.
 | Explore Courses for Electrical Engineering (EE) exam |
Top Courses for Electrical Engineering (EE)View all

Top Courses for Electrical Engineering (EE)
Question Description
What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? for Electrical Engineering (EE) 2026 is part of Electrical Engineering (EE) preparation. The Question and answers have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? covers all topics & solutions for Electrical Engineering (EE) 2026 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer?.
What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? for Electrical Engineering (EE) 2026 is part of Electrical Engineering (EE) preparation. The Question and answers have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? covers all topics & solutions for Electrical Engineering (EE) 2026 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer?.
Solutions for What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? in English & in Hindi are available as part of our courses for Electrical Engineering (EE). Download more important topics, notes, lectures and mock test series for Electrical Engineering (EE) Exam by signing up for free.
Here you can find the meaning of What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? defined & explained in the simplest way possible. Besides giving the explanation of What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer?, a detailed solution for What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? has been provided alongside types of What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? theory, EduRev gives you an ample number of questions to practice What is the full form of PID?a)Proportional Integral Derivativeb)Proportional Integral Devicec)Programmable Integral Deviced)Programmable Integral DerivativeCorrect answer is option 'A'. Can you explain this answer? tests, examples and also practice Electrical Engineering (EE) tests.
| Explore Courses for Electrical Engineering (EE) exam |
Top Courses for Electrical Engineering (EE)
Explore Courses
Signup for Free!
Signup to see your scores go up within 7 days! Learn & Practice with 1000+ FREE Notes, Videos & Tests.


