Vibrations | Mechanical Engineering SSC JE (Technical) PDF Download

VIBRATIONS
Any motion that exactly repeats itself after a certain interval of time is a periodic motion . A periodic motion which is having to and fro motion is called vibration.
TYPE OF VIBRATION
- Free Vibrations : Vibrations in which there are no friction and external force after the initial release of the body, are known as free or natural vibrations.
- Forced Vibrations : When a repeated force continuously acts on a system, the vibrations are said to be forced vibration. The frequency of the vibrations depends upon the applied force and is independent of there own natural frequency of vibrators.
- Damped Vibrations : When the energy of a vibrating system is gradually dissipated by friction and other resistances, the vibrations are said to be damped vibration.
- Undamped Vibrations (Hypothetical) :When there is no friction or resistance present in system to counter act vibration then body execute undamped vibration.
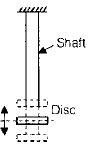
- Longitudinal Vibrations : If the shaft is elongated and shortened so that the same moves up and down resulting in tensile and compressive stresses in the shaft, the vibrations are said to be longitudinal.
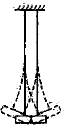
- Transverse Vibrations : When the shaft is bent alternately and tensile and compressive stresses due to bending result, the vibrations are said to be transverse vibration.
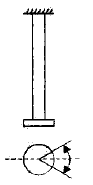
- Torsional Vibrations :When the shaft is twisted and untwisted alternately and torsional shear stresses are induced the vibrations are known as torsional vibrations.
BASIC ELEMENT OF VIBRATING SYSTEM
- Inertial element : These are represented by lumped masses for rectilinear motion and by lumped moment of inertia for angular motion.
- Restoring Elements : Massless linear or torsional springs represent the restoring elements for rectilinear and torsional motions respectively.
- Damping Elements : Massless dampers of rigid elements may be considered for energy dissipation in a system.
FREE LONGITUDINAL VIBRATION
Different methods for finding natural frequency of a vibrating system
(i) Equilibrium method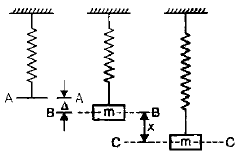
- It is based on the principle that whenever a vibratory system is in equilibrium the algebraic sum of forces and moments acting on it is zero.
- This is in accordance with D' Alembert's principle that the sum of the inertial forces and the external forces on a body in equilibrium must be zero.
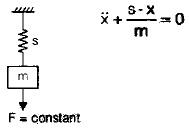
Let, D = static deflection
S = stiffness of the spring
Inertia force = m  (upwards) = ma, where a =
(upwards) = ma, where a =
Spring force = sx (upwards)
This is the equation of a simple harmonic motion and is analogous to
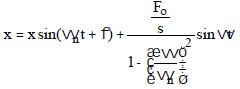
- The solution of which is given by

where A and B are the constants of integration and their values depend upon the manner in which the vibration starts.
- Linear frequency

Time period
(ii) Energy Method
• In a conservative system (system with no damping) the total mechanical energy i.e. the sum of the kinetic and the potential energies remains constant.
We know where v =
where v = 
or ma + sx = 0
(iii) Rayleigh's Method
- In this method, the maximum kinetic energy at the mean position is made equal to the maximum potential energy (or strain energy) of the extreme position.
Let the motion be simple harmonic
therefore, x = Xsinwnt
where X = maximum displacement from the mean position of the extreme position
or KE at mean position = PE at extreme position
- Inertial effect of mass of spring
If we consider mass of spring is 'm1' then
DAMPED LONGITUDINAL VIBRATION
- When an elastic body is set in vibratory motion, the vibrations die out after some time due to the internal molecular friction of the mass of the body and the friction of the medium in which it vibrates. The diminishing of vibrations with time is called damping.
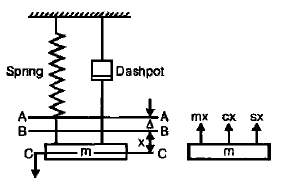
Assumption
• The damping force is proportional to the velocity of vibration at lower values of speed and proportional to the square of velocity at higher speeds.
Let, s = stiffness of the spring
c = damping coefficient (damping force per unit velocity)
wn = frequency of natural undamped vibrations
x = displacement of mass from mean position at time 't'
v =  = velocity of the mass at time 't'
= velocity of the mass at time 't'
f = = acceleration of the mass at time 't'.
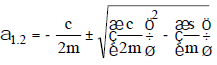
As the sum of the inertial force and the external forces on a body in any direction is
to be zero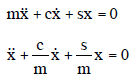
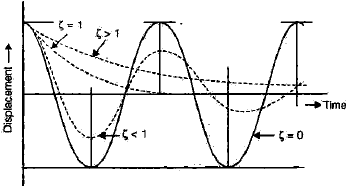
Damping factor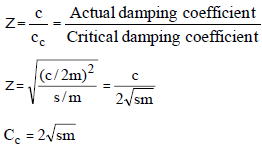
| Points to Remember z = 1, the damping is critical z > 1, the system is over-damped z < 1, the system is under-damped |
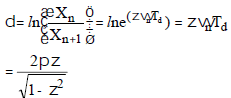
Logarithmic Decrement (d) : The ratio of two successive oscillations is constant in an underdamped system. Natural logarithm of this ratio is called logarithmic decrement.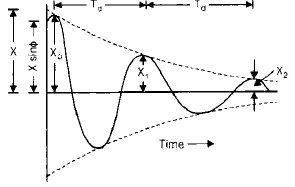
FORCED VIBRATION
- Step-input force
- Harmonic force
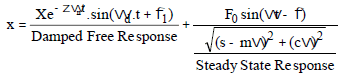
FORCED DAMPED VIBRATIONS
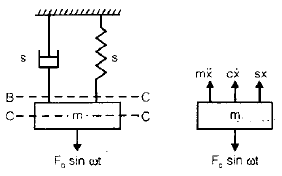
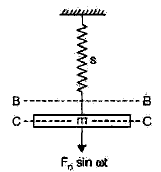
If the mass is subjected to an oscillating force F = F0 sinwt, the forces acting on the mass at any instant will be
- Impressed oscillating force (downwards)
F = F0 sinwt
- Inertial force (upward)
=m
- Damping force (upward) = c
- Spring force (restoring force) (upwards)
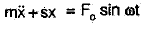
Thus the equation of motion will be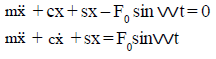
TRANSVERSE VIBRATION
Natural frequency of shaft and beams under different type of load and end condition, shows transverse vibration.
- In case of shafts and beams of negligible mass carrying a concentrated mass, the force is proportional to the deflection of the mass from the equilibrium position.
Where, for cantilevers supporting a concentrated mass at free end.
for cantilevers supporting a concentrated mass at free end. for simply supported beams
for simply supported beams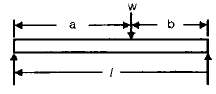

for beams fixed at both ends
Note : A shaft supported in long bearings is assumed to have both end fixed while one in short bearing is considered to be simply supported.
(ii) Uniformly loaded Shaft (Simply supported)
- A simply supported shaft carrying a uniformly distributed mass has maximum deflection at the mid-span.
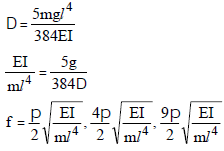
Then, taking the smallest value of fn
Note:
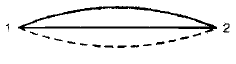
- This is the lowest frequency of transverse vibrations and is called the fundamental frequency. It has a node at each end.
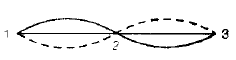
- The next higher frequency is four times the fundamental frequency. It has three nodes.
- The next higher frequency is nine times the fundamental. It has four nodes.
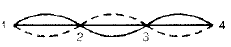
- Thus a simply supported shaft will have an infinite number of frequencies under uniformly distributed load.
- Similarly, the cases of cantilevers and shafts fixed at both ends can be considered.
(iii)Shaft Carrying several loads
A. Dunkerley's Method
- It is semi-empirical. This gives approximate results but is simple.
fn = frequency of transverse vibration of the whole system
fns = frequency with the distributed load acting alone.
fn1, fn2, fn3 ....... = frequencies of transverse vibrations when each of w1, w2, w3
.... alone.
Then, according do Dunkerley's empirical formula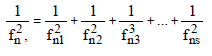
where 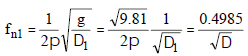
Similarly, 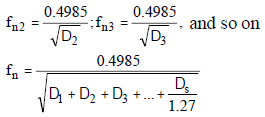
B. Energy Method
- Which gives accurate results but involves heavy calculations if there are many loads.
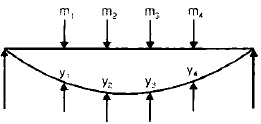
Maximum P.E.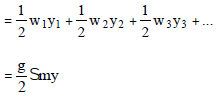
Maximum K.E.
ω = circular frequency of vibration
WHIRLING OF SHAFT
- When a rotor is mounted on a shaft, its centre of mass does not usually coincide with the centre line of the shaft. Therefore, when the shaft rotates, it is subjected to a centrifugal force which makes the shaft bend in the direction of eccentricity of the centre of mass. Thus further increases the eccentricity, and hence centrifugal force. The bending of shaft depends upon the eccentricity of the centre of mass of the rotor as well as upon the speed at which the shaft rotates.
- Critical or whirling or whipping speed is the speed at which the shaft tends to vibrate violently in the transverse direction .
|
5 videos|103 docs|59 tests
|
FAQs on Vibrations - Mechanical Engineering SSC JE (Technical)
| 1. What is vibration in mechanical engineering? |  |
| 2. How does vibration affect mechanical systems? | |
| 3. What are the common sources of vibration in mechanical systems? | |
| 4. How is vibration measured and analyzed in mechanical engineering? | |
| 5. How can vibration in mechanical systems be controlled or reduced? | |




mock tests for examination
,Viva Questions
,Exam
,Extra Questions
,Objective type Questions
,Sample Paper
,video lectures
,Semester Notes
,practice quizzes
,past year papers
,shortcuts and tricks
,Vibrations | Mechanical Engineering SSC JE (Technical)
,Previous Year Questions with Solutions
,Summary
,study material
,Vibrations | Mechanical Engineering SSC JE (Technical)
,Vibrations | Mechanical Engineering SSC JE (Technical)
,MCQs
,ppt
,Free
,Important questions
;


Vibrations Free PDF Download
Importance of Vibrations
Vibrations Notes
Vibrations Mechanical Engineering Questions
Study Vibrations on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!