Condition for Equilibrium in 3D | Engineering Mechanics for Mechanical Engineering PDF Download
We now extend our principles and methods developed for two dimensional equilibrium to the case of three-dimensional equilibrium. In Art. 3/1 the general conditions for the equilibrium of a body were stated in Eqs. 3/1, which require that the resultant force and resultant couple on a body in equilibrium be zero. These two vector equations of equilibrium and their scalar components may be written as
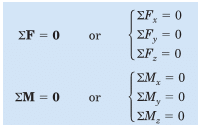
The first three scalar equations state that there is no resultant force acting on a body in equilibrium in any of the three coordinate directions. The second three scalar equations express the further equilibrium requirement that there be no resultant moment acting on the body about any of the coordinate axes or about axes parallel to the coordinate axes. These six equations are both necessary and sufficient conditions for complete equilibrium. The reference axes may be chosen arbitrarily as a matter of convenience, the only restriction being that a right-handed coordinate system should be chosen when vector notation is used. The six scalar relationships of Eqs. 3/3 are independent conditions because any of them can be valid without the others. For example, for a car which accelerates on a straight and level road in the x-direction, Newton’s second law tells us that the resultant force on the car equals its mass times its acceleration. Thus ΣFx = 0, but the remaining two force–equilibrium equations are satisfied because all other acceleration components are zero. Similarly, if the flywheel of the engine of the accelerating car is rotating with increasing angular speed about the x-axis, it is not in rotational equilibrium about this axis. Thus, for the flywheel alone, ΣMx = 0 along with ΣFx = 0, but the remaining four equilibrium equations for the flywheel would be satisfied for its mass-center axes. In applying the vector form of Eqs. 3/3, we first express each of the forces in terms of the coordinate unit vectors i, j, and k. For the first equation, ΣF = 0, the vector sum will be zero only if the coefficients of i, j, and k in the expression are, respectively, zero. These three sums, when each is set equal to zero, yield precisely the three scalar equations of equilibrium, ΣFx = 0, ΣFy = 0, and ΣFz = 0. For the second equation, ΣM
0, where the moment sum may be taken about any convenient point O, we express the moment of each force as the cross product rF, where r is the position vector from O to any point on the line of action of the force F. Thus ΣM = Σ(r*F) = 0.
When the coefficients of i, j, and k in the resulting moment equation are set equal to zero, respectively, we obtain the three scalar moment equations ΣMx = 0, ΣMy = 0, and ΣMz = 0.
|
24 videos|70 docs|58 tests
|
FAQs on Condition for Equilibrium in 3D - Engineering Mechanics for Mechanical Engineering
| 1. What is the condition for equilibrium in 3D? |  |
| 2. How do you determine if an object is in equilibrium in 3D? | |
| 3. Can an object be in equilibrium if there is a net force acting on it? | |
| 4. How does the center of gravity affect equilibrium in 3D? | |
| 5. What are the differences between static and dynamic equilibrium in 3D? | |

|
4.70/5 Rating |

|
Dec 22, 2024 Last updated |
|
24 videos|70 docs|58 tests
|

|
Explore Courses for Mechanical Engineering exam
|
|
Condition for Equilibrium in 3D | Engineering Mechanics for Mechanical Engineering
,mock tests for examination
,Previous Year Questions with Solutions
,Viva Questions
,Extra Questions
,Semester Notes
,study material
,Condition for Equilibrium in 3D | Engineering Mechanics for Mechanical Engineering
,past year papers
,Free
,Objective type Questions
,Exam
,shortcuts and tricks
,ppt
,Condition for Equilibrium in 3D | Engineering Mechanics for Mechanical Engineering
,Important questions
,practice quizzes
,Summary
,video lectures
,Sample Paper
,MCQs
;






Condition for Equilibrium in 3D Free PDF Download
Importance of Condition for Equilibrium in 3D
Condition for Equilibrium in 3D Notes
Condition for Equilibrium in 3D Mechanical Engineering Questions
Study Condition for Equilibrium in 3D on the App
|
© EduRev
|
Education Revolution
|



|




