Computer Science Engineering (CSE) Exam > Computer Science Engineering (CSE) Notes > Computer Architecture & Organisation (CAO) > Control Unit Operation
Control Unit Operation | Computer Architecture & Organisation (CAO) - Computer Science Engineering (CSE) PDF Download

Control Unit Operation
Microoperations
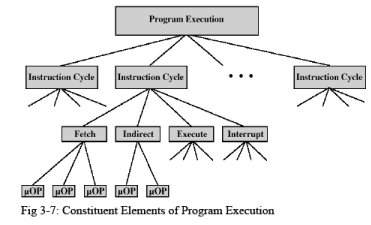
- A computer executes a program consisting instructions. Each instruction is made up of shorter sub-cycles as fetch, indirect, execute cycle, interrupt.
- Performance of each cycle has a number of shorter operations called microoperations.
- Called so because each step is very simple and does very little.
- Thus micro-operations are functional atomic operation of CPU.
- Hence events of any instruction cycle can be described as a sequence of micro-operations
Steps leading to characterization of CU
- Define basic elements of processor
- Describe micro-operations processor performs
- Determine functions control unit must perform
Types of Micro-operation
- Transfer data between registers
- Transfer data from register to external interface
- Transfer data from external interface to register
- Perform arithmetic/logical ops with register for i/p, o/p
Functions of Control Unit
- Sequencing
- Causing the CPU to step through a series of micro-operations
- Execution
- Causing the performance of each micro-op
These are done using Control Signals
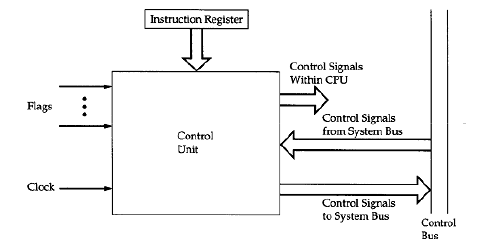
Inputs to Control Unit
- Clock
- CU causes one micro-instruction (or set of parallel micro-instructions) per clock cycle
- Instruction register
- Op-code for current instruction determines which micro-instructions are performed
- Flags
- State of CPU
- Results of previous operations
- From control bus
- Interrupts
- Acknowledgements
CU Outputs (Control Signals)
- Within CPU(two types)
- Cause data movement
- Activate specific ALU functions
- Via control bus(two types)
- To memory
- To I/O modules
- Types of Control Signals
- Those that activate an ALU
- Those that activate a data path
- Those that are signal on external system bus or other external interface.
- All these are applied as binary i/p to individual logic gates
Hardwired Implementation
- In this implementation, CU is essentially a combinational circuit. Its i/p signals are transformed into set of o/p logic signal which are control signals.
- Control unit inputs
- Flags and control bus
- Each bit means something
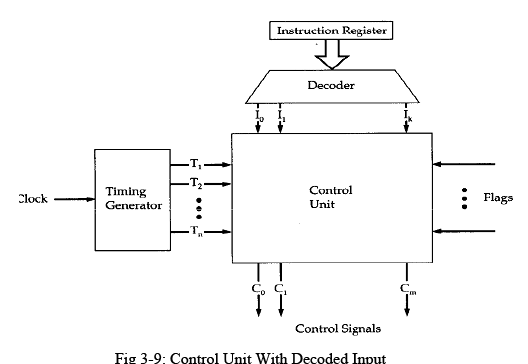
- Instruction register
- Op-code causes different control signals for each different instruction
- Unique logic for each op-code
- Decoder takes encoded input and produces single output
- Each decoder i/p will activate a single unique o/p
- Clock
- Repetitive sequence of pulses
- Useful for measuring duration of micro-ops
- Must be long enough to allow signal propagation along data paths and through processor circuitry
- Different control signals at different times within instruction cycle
- Need a counter as i/p to control unit with different control signals being used for t1, t2 etc.
- At end of instruction cycle, counter is re-initialised
Implementation
- For each control signal, a Boolean expression of that signal as a function of the inputs is derived
- With that the combinatorial circuit is realized as control unit.
Problems With Hard Wired Designs
- Complex sequencing & micro-operation logic
- Difficult to design and test
- Inflexible design
- Difficult to add new instructions
Micro-programmed Implementation
- An alternative to hardwired CU
- Common in contemporary CISC processors
- Use sequences of instructions to perform control operations performed by micro operations called micro-programming or firmware
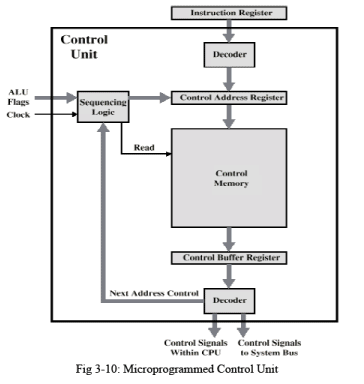
- Set of microinsrurctions are stored in control memory
- Control address register contains the address of the next microinstruction to be read
- As it is read, it is transferred to control buffer register.
- For horizontal micro instructions, reading a microinstruction is same as executing it.
- Sequencing unit loads the control address register and issues a read command CU functions as follows to execute an instruction:
- Sequencing logic issues read command to control memory
- Word whose address is in control address register is read into control buffer register.
- Content of control buffer register generates control signals and next address instruction for the sequencing logic unit.
- Sequencing logic unit loads new address into control address register depending upon the value of ALU flags, control buffer register.
- One of following decision is made:
* add 1 to control address register
* load address from address field of control buffer register
* load the control address register based on opcode in IR - Upper decoder translates the opcode of IR into control memory address.
- Lower decoder used for veritcal micro instructions.
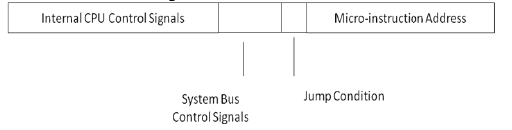
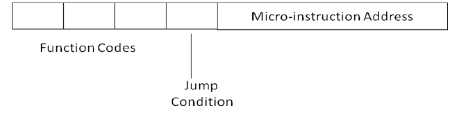
Micro-instruction Types
- Each micro-instruction specifies single or few micro-operations to be performed -vertical micro-programming
- Each micro-instruction specifies many different micro-operations to be performed in parallel - horizontal micro-programming
Horizontal Micro-programming
- Wide memory word
- High degree of parallel operations possible
- Little encoding of control information
Vertical Micro-programming
- Width is narrow
- n control signals encoded into log2 n bits
- Limited ability to express parallelism
- Considerable encoding of control information requires external memory word decoder to identify the exact control line being manipulated
The document Control Unit Operation | Computer Architecture & Organisation (CAO) - Computer Science Engineering (CSE) is a part of the Computer Science Engineering (CSE) Course Computer Architecture & Organisation (CAO).
All you need of Computer Science Engineering (CSE) at this link: Computer Science Engineering (CSE)
|
20 videos|87 docs|48 tests
|
FAQs on Control Unit Operation - Computer Architecture & Organisation (CAO) - Computer Science Engineering (CSE)
| 1. What is the purpose of a control unit in a computer system? |  |
| 2. How does a control unit execute instructions in a computer system? | |
Ans. The control unit executes instructions by following a sequence of steps known as the instruction cycle. It fetches the instruction from the memory, decodes it to determine the operation to be performed, fetches the operands if necessary, and then executes the instruction by issuing appropriate signals to the other hardware components.
| 3. Can a computer system function without a control unit? | |
Ans. No, a computer system cannot function without a control unit. The control unit is an essential component that coordinates the activities of other hardware components, such as the CPU, memory, and input/output devices. Without a control unit, the computer would not be able to execute instructions or perform any meaningful tasks.
| 4. What are the main tasks performed by a control unit? | |
Ans. The main tasks performed by a control unit include fetching instructions from memory, decoding instructions to determine the operation to be performed, fetching operands if necessary, executing instructions by issuing appropriate signals to other hardware components, and handling any exceptions or interrupts that may occur during the execution of instructions.
| 5. How does the control unit ensure the correct execution of instructions in a computer system? | |
Ans. The control unit ensures the correct execution of instructions by carefully following the instruction cycle and coordinating the activities of other hardware components. It fetches instructions from memory, decodes them accurately, fetches the necessary operands, and issues appropriate signals to ensure that the instructions are executed correctly. Additionally, the control unit also handles any exceptions or interrupts that may occur during the execution of instructions to maintain the system's stability and reliability.
Related Exams
About this Document

2.9K Views

4.62/5
Rating

Feb 28, 2025
Last updated
Document Description: Control Unit Operation for Computer Science Engineering (CSE) 2025 is part of Computer Architecture & Organisation (CAO) preparation.
The notes and questions for Control Unit Operation have been prepared according to the Computer Science Engineering (CSE) exam syllabus. Information about Control Unit Operation covers topics
like and Control Unit Operation Example, for Computer Science Engineering (CSE) 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Control Unit Operation.
Introduction of Control Unit Operation in English is available as part of our Computer Architecture & Organisation (CAO)
for Computer Science Engineering (CSE) & Control Unit Operation in Hindi for Computer Architecture & Organisation (CAO) course.
Download more important topics related with notes, lectures and mock test series for Computer Science Engineering (CSE)
Exam by signing up for free. Computer Science Engineering (CSE): Control Unit Operation | Computer Architecture & Organisation (CAO) - Computer Science Engineering (CSE)
Description
Full syllabus notes, lecture & questions for Control Unit Operation | Computer Architecture & Organisation (CAO) - Computer Science Engineering (CSE) - Computer Science Engineering (CSE) | Plus excerises question with solution to help you revise complete syllabus for Computer Architecture & Organisation (CAO) | Best notes, free PDF download
Information about Control Unit Operation
In this doc you can find the meaning of Control Unit Operation defined & explained in the simplest way possible. Besides explaining types of
Control Unit Operation theory, EduRev gives you an ample number of questions to practice Control Unit Operation tests, examples and also practice Computer Science Engineering (CSE)
tests
|
20 videos|87 docs|48 tests
|
Download as PDF

|
Explore Courses for Computer Science Engineering (CSE) exam
|
|
Related Searches
Viva Questions
,Extra Questions
,video lectures
,Sample Paper
,Control Unit Operation | Computer Architecture & Organisation (CAO) - Computer Science Engineering (CSE)
,MCQs
,Previous Year Questions with Solutions
,study material
,mock tests for examination
,shortcuts and tricks
,Semester Notes
,Objective type Questions
,Exam
,Control Unit Operation | Computer Architecture & Organisation (CAO) - Computer Science Engineering (CSE)
,Summary
,past year papers
,practice quizzes
,Important questions
,ppt
,Control Unit Operation | Computer Architecture & Organisation (CAO) - Computer Science Engineering (CSE)
,Free
;






Additional Information about Control Unit Operation for Computer Science Engineering (CSE) Preparation
Control Unit Operation Free PDF Download
The Control Unit Operation is an invaluable resource that delves deep into the core of the Computer Science Engineering (CSE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Control Unit Operation now and kickstart your journey towards success in the Computer Science Engineering (CSE) exam.
Importance of Control Unit Operation
The importance of Control Unit Operation cannot be overstated, especially for Computer Science Engineering (CSE) aspirants.
This document holds the key to success in the Computer Science Engineering (CSE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Control Unit Operation Notes
Control Unit Operation Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Control Unit Operation.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Control Unit Operation Notes on EduRev are your ultimate resource for success.
Control Unit Operation Computer Science Engineering (CSE) Questions
The "Control Unit Operation Computer Science Engineering (CSE) Questions" guide is a valuable resource for all aspiring students preparing for the
Computer Science Engineering (CSE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Control Unit Operation on the App
Students of Computer Science Engineering (CSE) can study Control Unit Operation alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Control Unit Operation,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Control Unit Operation is prepared as per the latest Computer Science Engineering (CSE) syllabus.
|
© EduRev
|
Education Revolution
|



|







Signup to see your scores
go up within 7 days!
Access 1000+ FREE Docs, Videos and Tests
Takes less than 10 seconds to signup