Discrete Time Convolution | Signals and Systems - Electrical Engineering (EE) PDF Download
Discrete time convolution
As the name suggests the two basic properties of a LTI system are:
1) Linearity
A linear system (continuous or discrete time ) is a system that possesses the property of SUPERPOSITION. The principle of superposition states that the response of sum of two or more weighted inputs is the sum of the weighted responses of each of the signals. Mathematically
y[n] = S ak yk[n] = a1y1[n] + a2y2 [n] + ......
Superposition combines in itself the properties of ADDITIVITY and HOMOGENEITY. This is a powerful property and allows us to evaluate the response for an arbitrary input, if it can be expressed as a sum of functions whose responses are known.
2) Time Invariance
It allows us to find the response to a function which is delayed or advanced in time; but similar in shape to a function whose response is known.
Given the response of a system to a particular input, these two properties enable us to find the response to all its delays or advances and their linear combination.
Discrete Time LTI Systems
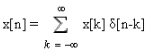
Consider any discrete time signal x[n]. It is intuitive to see how the signal x[n] can be represented as sum of many delayed/advanced and scaled Unit Impulse Signals
Mathematically, the above function can be represented as

More generally any discrete time signal x[n] can be represented as
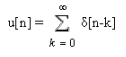
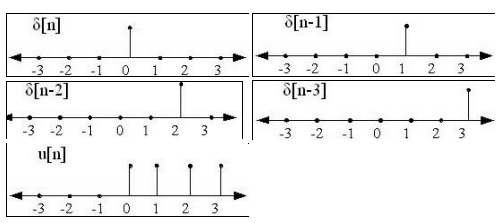
The above expression corresponds to the representation of any arbitrary sequence as a linear combination of shifted Unit Impulses  which are scaled by x[n]. Consider for example the Unit Step function. As shown earlier it can be represented as
which are scaled by x[n]. Consider for example the Unit Step function. As shown earlier it can be represented as
Now if we knew the response of a system for a Unit Impulse Function, we can obtain the response of any arbitrary input. To see why this is so, we invoke the properties of Linearity, Homogeneity ( Superposition ) and Time Invariance.
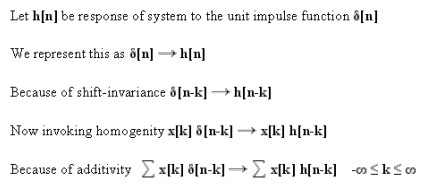
The left hand side can be identified as any arbitrary input, while the right hand side can be identified as the total output to the signal. The total response of the system is referred to as the CONVOLUTION SUM or superposition sum of the sequences x[n] and h[n]. The result is more concisely stated as y[n] = x[n] * h[n], where

Therefore, as we said earlier a LTI system is completely characterized by its response to a single signal i.e. response to the Unit Impulse signal.
Example Related to Discrete Time LTI Systems
Recall that the convolution sum is given by
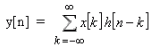
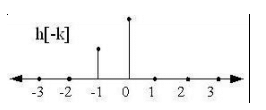
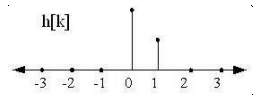
Now we plot x[k] and h[n-k] as functions of k and not n because of the summation over k. Functions x[k] and h[k] are the same as x[n] and h[n] but plotted as functions of k. Then, the convolution sum is realized as follows 1. Invert h[k] about k=0 to obtain h[-k].
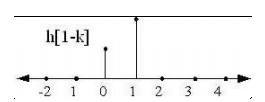
2. The function h[n-k] is given by h[-k] shifted to the right by n (if n is positive) and to the left (if n is negative). It may appear contradictory but think a while to verify this (note the sign of the independent variable).
In the figure below n=1
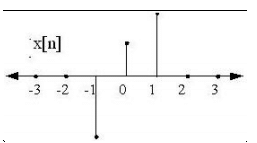
3. Multiply x[k] and h[n-k] for same coordinates on the k axis. The value obtained is the response at n i.e. Value of y[n] at a particular n the value chosen in step 2. Now we demonstrate the entire procedure taking n=0,1 thereby obtaining the response at n=0,1. The input signal x[n] and for this example is taken as :
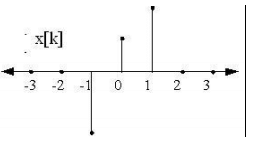
Case 1: For n=0
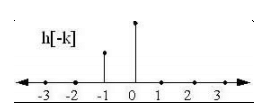
Remember the independence axis has k as the independent variable. Then taking the product x[k] h[-k] for same k and summing it we get the value of the response at n=0.
Let h[-k] = g[k]
y[0] = ...........x[-1]g[-1] + x[0] g[0] +............... = (-2) (1) +(1) (2) = 0
Case 2: For n=1
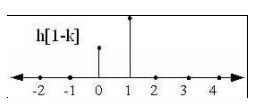
h[1-k] =g[k]
y[1] = .........+ x[0]g[0] + x[1]g[1] + ............. = (1)(1) +(2)(2) = 5
The values are the same as that obtained previously. The total response referred to as the Convolution sum need not always be found graphically. The formula can directly be applied if the input and the impulse response are some mathematical functions. We show this by an example next.
Example
Find the total response when the input function is .  And the impulse response is given by
And the impulse response is given by  .
.
Applying the convolution formula we get

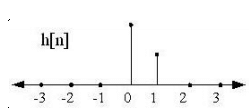
We now give an alternative method for calculating the convolution of the given signal x[n] and the response to the unit impulse function. Let us see how convolution output is the sum of weighted and shifted instances of the impulse response. Let the given signal x[n] be
Let the Impulse Response be
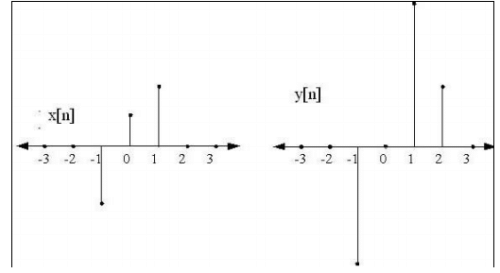
Now we break the signal in its components i.e. expressed as a sum of unit impulses scaled and delayed or advanced appropriately. Simultaneously we show the output as sum of responses of unit impulses function scaled by the same multiplying factor and appropriately delayed or advanced.
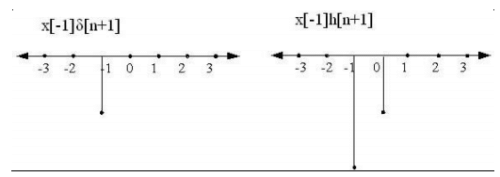

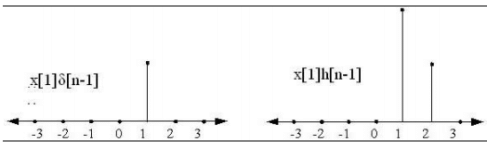
Summing the left and the right hand sides of the above figures we get the input x[n] and the total response on the left and the right sides respectively. Thus we see the graphical analog the above formula.
The total response referred to as the Convolution sum need not always be found graphically. The formula can directly be applied if the input and the impulse response are some mathematical functions. We show this by a example.
Conclusion:
In this lecture you have learnt:
- The two basic properties of LTI systems are linearity and shift-invariance. It is completely characterised by its impulse response.
- Any discrete time signal x[n] can be represented as a linear combination of shifted Unit Impulses scaled by x[n].
- The unit step function can be represented as sum of shifted unit impulses.
- The total response of the system is referred to as the CONVOLUTION SUM or superposition sum of the sequences x[n] and h[n]. The result is more concisely stated as y[n] = x[n] * h[n].
- The convolution sum is realized as follows
1. Invert h[k] about k=0 to obtain h[-k].
2. The function h[n-k] is given by h[-k] shifted to the right by n (if n is positive) and to the left (if n is negative) (note the sign of the independent variable).
3. Multiply x[k] and h[n-k] for same coordinates on the k axis. The value obtained is the response at n i.e. Value of y[n] at a particular n the value chosen in step 2.
|
41 videos|52 docs|33 tests
|
FAQs on Discrete Time Convolution - Signals and Systems - Electrical Engineering (EE)
| 1. What is discrete time convolution? |  |
| 2. How is discrete time convolution different from continuous time convolution? | |
| 3. What is the purpose of discrete time convolution in signal processing? | |
| 4. How is discrete time convolution computed? | |
| 5. What are some real-world applications of discrete time convolution? | |

|
4.93/5 Rating |

|
Jan 03, 2025 Last updated |

|
Explore Courses for Electrical Engineering (EE) exam
|
|
Discrete Time Convolution | Signals and Systems - Electrical Engineering (EE)
,Free
,shortcuts and tricks
,ppt
,practice quizzes
,Semester Notes
,Discrete Time Convolution | Signals and Systems - Electrical Engineering (EE)
,study material
,Previous Year Questions with Solutions
,video lectures
,mock tests for examination
,Discrete Time Convolution | Signals and Systems - Electrical Engineering (EE)
,Objective type Questions
,past year papers
,Important questions
,MCQs
,Sample Paper
,Exam
,Viva Questions
,Extra Questions
,Summary
;






Discrete Time Convolution Free PDF Download
Importance of Discrete Time Convolution
Discrete Time Convolution Notes
Discrete Time Convolution Electrical Engineering (EE) Questions
Study Discrete Time Convolution on the App
|
© EduRev
|
Education Revolution
|



|




