Dynamical systems - 4 | Physics for IIT JAM, UGC - NET, CSIR NET PDF Download

Centres and foci
Next special case we consider is the dynamical system of the form
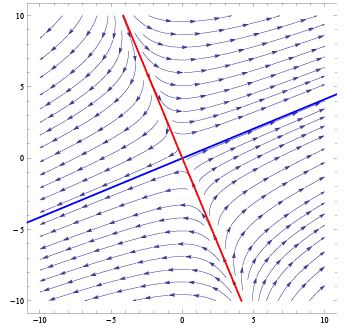
Fig. 8.9. Phase portrait for dynamical system (8.20). Blue line represents unstable manifold, red line represents stable manifold.
 (8.21)
(8.21)
Matrix of this system is
 (8.22)
(8.22)
System (8.21) is little trickier to solve. Let us switch to polar coordinate system by usual transformation
x = r cos θ; y = r sin θ;
where r = r(t) and θ = θ(t). Inverse transformation reads
These relations can be used to find

Now we use (8.21) to derive corresponding equations for r and θ:
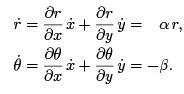
We can see that dynamical system (8.21) in polar coordinates decouples to two independent equations for coordinates r and θ,
 (8.23)
(8.23)
First we solve equation for r. Let us write it in the form

which integrates to
log r = α t + log C
where the integration constant has been written as a logarithm (see footnote on page 162). Exponentiating the last equation we arrive at

Obviously, at time t = 0 we have r(0) = C and so we write the solution in the form

Next we solve equation for θ. This is trivial since we have

which integrates to
where the integration constant has been denoted by θ0 and represents the value of θ at t = 0. Summa summarum, solution of system (8.23) acquires the form
 (8.24)
(8.24)
Hence, solution of original system (8.21) in the Cartesian coordinates reads
 (8.25)
(8.25)
Suppose that α = 0 so that

Clearly, this represents motion at constant angular velocity β and constant radius r0 and therefore the phase trajectories are circles of radius r0. If
α ≠ 0, the radius of the "circle" will be

and hence the trajectory will be a spiral. If α > 0, the radius will increase exponentially and the spiral will tend to in nity. If, on the other hand, α < 0, the radius will decrease exponentially and the phase tra jectories will spiral towards the origin. All cases are plotted in gure 8.10 by Mathematica commands
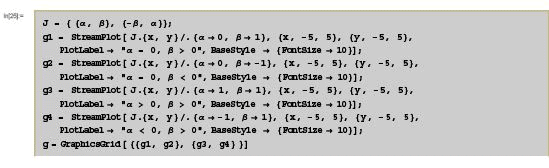
and can be classi ed as follows:
- α = 0 Critical point is called centre. Tra jectories are circles centred at the origin.
- α > 0 Critical point is called unstable focus, tra jectories are spirals escaping to in nity.
- α < 0 Critical point is called stable focus, tra jectories are spirals tending to the origin.
Parameter β has the meaning of angular velocity. If it is zero, spirals become straight lines and dynamical system reduces to previous case (8.17). If it is non-zero, its sign determines the sense of rotation: tra jectories orbit the origin in a clockwise sense for β > 0 and in a counter-clockwise sense for β < 0.
Let us now analyse critical points of system (8.21) in terms of eigenvalues of matrix (8.22)
We can use Mathematica to nd the eigenvalues and eigenvectors of matrix (8.22) by
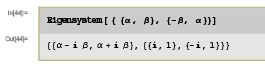
which shows that this matrix has two eigenvalues

with eigenvectors
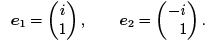
In other words, eigenvalues and eigenvectors of matrix J satisfy relations

The rst observation is that the eigenvectors are complex and hence there are no neither stable nor unstable manifolds, i.e. there is no real direction which is mapped to the same direction. The only exception is when β = 0 since in this case dynamical system (8.21) reduces to (8.17) and the eigenvectors become real.
Second, eigenvalues λ1,2 are mutually complex conjugated (as well as the eigenvectors),
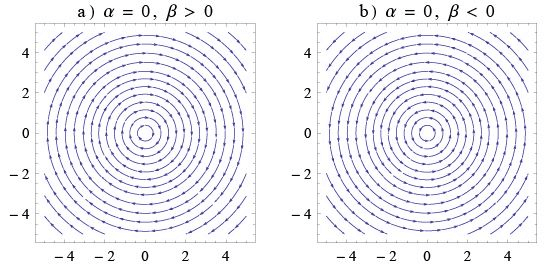
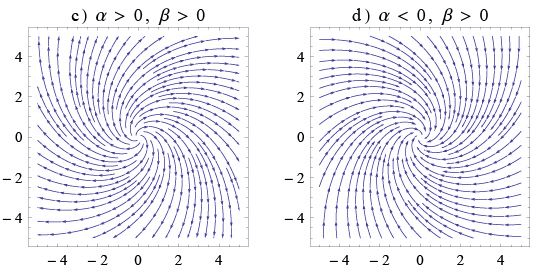
Fig. 8.10. Classi cation of critical points for the system (8.21): a, b) centre, c) unstable focus, d) stable focus.

where the bar denotes the complex conjugation. Hence, even if the dynamical system is not of the form (8.21), we can conclude, that if the matrix J has two complex conjugated eigenvalues

the critical point is stable/unstable focus or a centre, depending on the values of α and β as classi ed above.
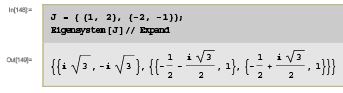
Example. Consider dynamical system

This system is not of the form (8.21) but we can apply the criterion based on the analysis of eigenvalues. In Mathematica we type
where we have used Expand in order to simplify the expression for eigenvectors (try this code without Expand). We have found two eigenvalues

which are mutually complex conjugated. In this case, parameters α and β are

Parameter α is positive and so the critical point is an unstable focus. Tra jectories of dynamical system considered:
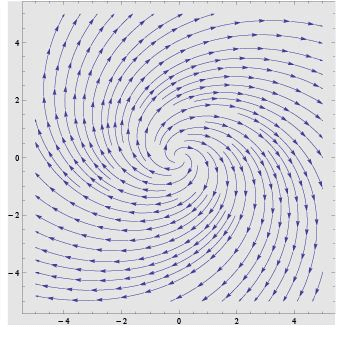
Another example is the system

Eigenvalues are found by
Hence, now the eigenvalues are

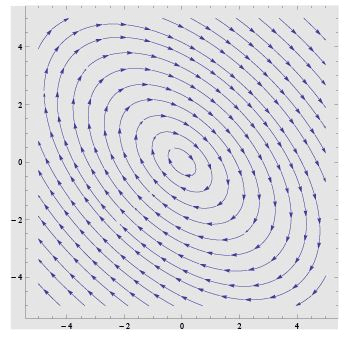
which means that

Since α = 0, critical point is a centre rather than focus. Tra jectories of this dynamical system are the following:
General case
In the previous two sections we studied two special cases of planar linear dynamical systems given by matrices
However, we have seen that the analysis can be performed using the eigenvalues of these matrices. Now we consider general linear planar dynamical system
 (8.26)
(8.26)
Let us find the eigenvalues and eigenvectors of this general matrix. Recall that the determinant of matrix J is
The trace of the matrix is de ned as a sum of its diagonal elements, i.e.

Eigenvalues λ are defined by equation

where e is an eigenvector. The last equation can be rewritten in the form
where I is the unit matrix 2 x 2 so that
This equation is a homogeneous system of linear equations which has non-trivial solutions only if the determinant of the system is zero:
This determinant reads

Expanding the brackets we arrive at

or, equivalently

This is a quadratic equation for λ and its solutions are
 (8.27)
(8.27)
Now we can summarize the classification of critical points as follows.

Moreover, if the real parts of eigenvalues λ1,2 are non-zero, critical point is called hyperbolic, otherwise it is called non-hyperbolic.
FAQs on Dynamical systems - 4 - Physics for IIT JAM, UGC - NET, CSIR NET
| 1. What are dynamical systems in physics? |  |
| 2. How are dynamical systems analyzed in physics? | |
| 3. What is chaos theory and its relevance to dynamical systems in physics? | |
| 4. Can dynamical systems in physics exhibit stable behavior? | |
| 5. How are dynamical systems used in studying celestial mechanics? | |



CSIR NET
,Dynamical systems - 4 | Physics for IIT JAM
,study material
,CSIR NET
,Exam
,past year papers
,UGC - NET
,Sample Paper
,Important questions
,CSIR NET
,mock tests for examination
,Viva Questions
,Extra Questions
,Free
,MCQs
,Summary
,UGC - NET
,ppt
,Objective type Questions
,Dynamical systems - 4 | Physics for IIT JAM
,UGC - NET
,practice quizzes
,Semester Notes
,video lectures
,Dynamical systems - 4 | Physics for IIT JAM
,Previous Year Questions with Solutions
,shortcuts and tricks
;






Dynamical systems - 4 Free PDF Download
Importance of Dynamical systems - 4
Dynamical systems - 4 Notes
Dynamical systems - 4 Physics Questions
Study Dynamical systems - 4 on the App
|
© EduRev
|
Education Revolution
|



|





