Elements of Vector Calculus: Laplacian | Electromagnetic Fields Theory (EMFT) - Electrical Engineering (EE) PDF Download

Till now we have talked about operators such as gradient, divergence and curl which act on scalar or vector fields. These operators are all first order differential operators. Gradient operator, acting on a scalar field, gives a vector field. Divergence, on the other hand, acts on a vector field giving a scalar field. The curl operator, acting on a vector field, gives another vector field. The Cartesian expressions for these operators are as follows : The operator 
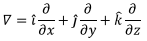
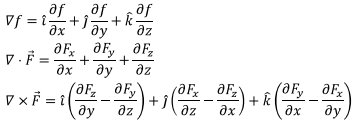
where we have denoted a scalar field by f and a vector field by 
We will define another useful operator, known as the Laplacian operator, which is a second order differential operator acting on a scalar field (and with some conventional usage on a vector field). This operator is denoted by  i.e. it is a divergence of a gradient operator. Since the gradient operates on a scalar field giving rise to a vector, the divergence operator can act on this finally resulting on a scalar field. Thus
i.e. it is a divergence of a gradient operator. Since the gradient operates on a scalar field giving rise to a vector, the divergence operator can act on this finally resulting on a scalar field. Thus
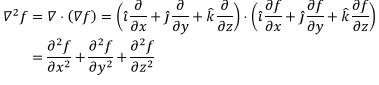
The operator  denoted by
denoted by  as the Laplacian.
as the Laplacian.
A class of functions, known as “Harmonic Functions” satisfy what is known as the Laplacian equation,

In electromagnetic theory, in particular, one often finds  operator acting on a vector field. As has been explained above, a Laplacian can only act on a scalar field. However, often we have equations where the Laplacian operator acts on components of a vector field, which are of course scalars. Thus
operator acting on a vector field. As has been explained above, a Laplacian can only act on a scalar field. However, often we have equations where the Laplacian operator acts on components of a vector field, which are of course scalars. Thus  is used as a short hand notation, which actually means
is used as a short hand notation, which actually means  where
where  are the unit vectors along three orthogonal directions in the chosen coordinate system and
are the unit vectors along three orthogonal directions in the chosen coordinate system and  are the components of the vector field
are the components of the vector field  directions. Thus, in Cartesian coordinates, we have
directions. Thus, in Cartesian coordinates, we have
In electrodynamics, several operator identities using the operator  frequently used. Here is a list of them. They are not proved here but you are strongly advised to prove some of them.
frequently used. Here is a list of them. They are not proved here but you are strongly advised to prove some of them.
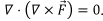
1.  This is obvious because
This is obvious because  represents a conservative field, whose curl is zero.
represents a conservative field, whose curl is zero.
2.  We have seen that
We have seen that  represents a solenoidal field, which is divergenceless. We will see later that the magnetic field B is an example of a solenoidal field.
represents a solenoidal field, which is divergenceless. We will see later that the magnetic field B is an example of a solenoidal field.
3.  This operator identity is very similar to the vector triple product. (for ordinary vectors, we have
This operator identity is very similar to the vector triple product. (for ordinary vectors, we have 
4.  where both f and are scalar fields.
where both f and are scalar fields.
5. 
6. 
Green’s Identities :
We will now derive two important identities which go by the name Green’s identities.
Let the vector field  be single valued and continuously differentiable inside a volume V bounded by a surface S. By divergence theorem, we have
be single valued and continuously differentiable inside a volume V bounded by a surface S. By divergence theorem, we have
If we choose  are two scalar fields, then we get, using the relation (5) above,
are two scalar fields, then we get, using the relation (5) above,

This is known as Green’s first identity. By interchanging 

Equation (3) is Green’s second identity and is also known as the Green’s Theorem.
Uniqueness Theorem :
An important result for the vector fields is that in a region of volume V defined by a closed surface S, a vector field is uniquely specified by
1. its divergence
2. its curl and
3. its normal component at all points on the surface S.
This can be shown by use of the Green’s theorem stated above. Consider two vector fields  which are specified inside such a volume and let us assume that they have identical divergences, curl as also identical values at all points on the defining surface. The uniqueness theorem implies that the two vector fields are identical.
which are specified inside such a volume and let us assume that they have identical divergences, curl as also identical values at all points on the defining surface. The uniqueness theorem implies that the two vector fields are identical.
To see this let us define a third vector  By the properties that we have assumed for
By the properties that we have assumed for 
 that curl of
that curl of  is a conservative field and hence can be expressed as a gradient of some potential. Let
is a conservative field and hence can be expressed as a gradient of some potential. Let  The equality of the divergences of
The equality of the divergences of  implies that the divergence of
implies that the divergence of  which, in turn, implies that
which, in turn, implies that  the scalar potential
the scalar potential  the Laplace’s equation at every point inside the volume V.
the Laplace’s equation at every point inside the volume V.
The third property, viz., the identity of the normal components of  at every point on S implies that the normal component of
at every point on S implies that the normal component of  Let us use Green’s first identity , given by eqn. (1) above taking
Let us use Green’s first identity , given by eqn. (1) above taking 

the last relation follows because  everywhere on the surface. Thus we have,
everywhere on the surface. Thus we have,

Since  everywhere on the surface, it gives
everywhere on the surface, it gives  Since an integral of a function which is positive everywhere in the volume of integration cannot be zero unless the integrand identically vanishes, we get
Since an integral of a function which is positive everywhere in the volume of integration cannot be zero unless the integrand identically vanishes, we get  proving the theorem.
proving the theorem.
Dirac Delta Function
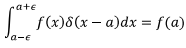
Before we conclude our discussion of the mathematical preliminaries, we would introduce you to a very unusual type of function which is known as Dirac’s δ function. In a strict sense, it is not a function and mathematicians would like to call it as “generalized function” or a “distribution”. The defining properties of a delta function are as follows :
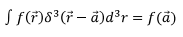
In the last relation, it is to be noted that the limits of integration includes the point where the argument of the delta function vanishes. Note that the function is not defined at the point x=0. It easily follows that if we take a test function f(x) , we have
We can easily see why it is not a function in a strict sense. The function is zero at every point other than at one point where it is not defined. We know that a Riemann integral is defined in terms of the area enclosed by the function with the x axis between the limits. If we have a function which is zero everywhere excepting at a point, no matter what be the value of the function at such a point, the width of a point being zero, the area enclosed is zero. As a matter of fact, a standard theorem in Riemann integration states that if a function is zero everywhere excepting at a discrete set of points, the Riemann integral of such a function is zero.
How do we then understand such a function? The best way to look at a delta function is as a limit of a sequence of functions. We give a few such examples.
1. Consider a sequence of functions defined as follows :
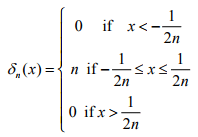
For a fixed n, it represents a rectangle of height n, spread from  The figure below sketches a few such rectangles.
The figure below sketches a few such rectangles.
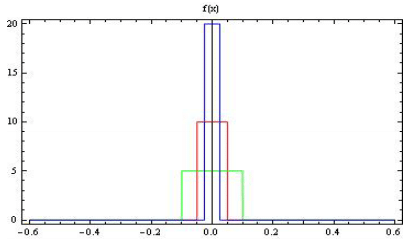
As n becomes very large, the width of the rectangle decreases but height increases in such a proportion that the area remains fixed at the value 1. As n → ∞ the width becomes zero but the area is still finite. This is the picture of the delta function that we talked about.
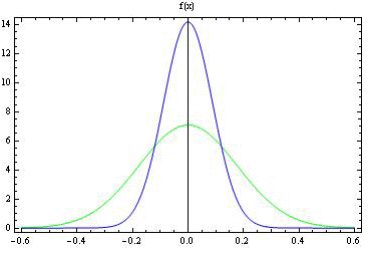
2. As second example, consider a sequence of Gaussian functions given by
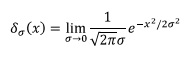
These functions are defined such that their integral is normalized to 1,
for any value of σ. For instance, if we take σ to be a sequence of decreasing fractions 1,1/2,
…,1/100, .. the functions represented by the sequence are  which are fast decreasing functions and the limit of these when σ approaches zero is zero provided x ≠ 0. Note, however, the value of the function at x=0 increases with decreasing σ though the integral remains fixed at its value of 1.
which are fast decreasing functions and the limit of these when σ approaches zero is zero provided x ≠ 0. Note, however, the value of the function at x=0 increases with decreasing σ though the integral remains fixed at its value of 1.
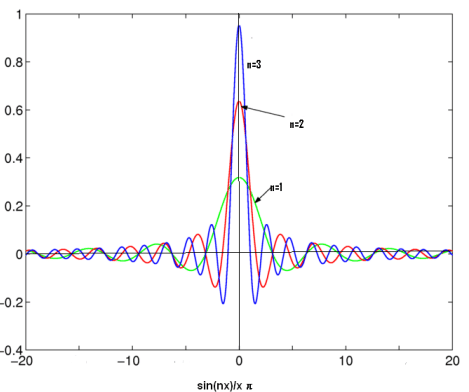
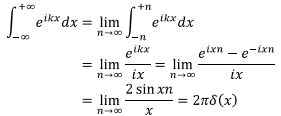
3. A third sequence that we may look into is a sequence of “sinc” functions which are commonly met with in the theory of diffraction  Note that as ∈ becomes smaller and smaller, the width of the central pattern decreases and the function gets peaked about the origin. Further, it can be shown that
Note that as ∈ becomes smaller and smaller, the width of the central pattern decreases and the function gets peaked about the origin. Further, it can be shown that  Thus the function
Thus the function  is a representation of the delta function in the limit of
is a representation of the delta function in the limit of 
This gives us a very well known integral representation of the delta function
One can prove this as follows:
where we have set  to arrive at the last result. It may be noted that the integrals above are convergent in their usual sense because sin (nx) does not have a well defined value for
to arrive at the last result. It may be noted that the integrals above are convergent in their usual sense because sin (nx) does not have a well defined value for 
4. An yet another representation is as a sequence of Lorentzian functions  It can be seen that
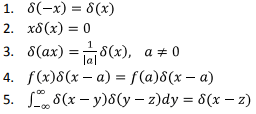
It can be seen that 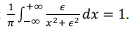 Some properties of δ- functions which we state without proof are as follows:
Some properties of δ- functions which we state without proof are as follows:
We end this lecture by summarizing properties of cylindrical and spherical coordinate systems that we have been using (and will be using) in these lectures.
Cylindrical Coordinate system
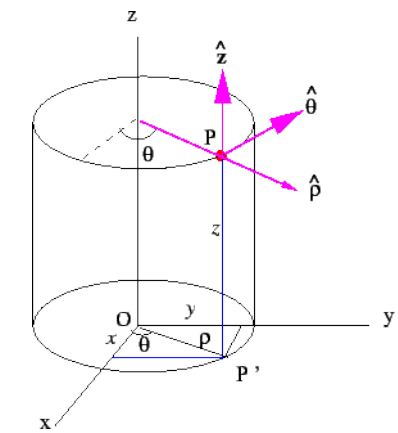
The unit vectors of the cylindrical coordinates are shown above. It may be noted that the z axis is identical to that of the Cartesian coordinates. The variables ρ and θ are similar to the two dimensional polar coordinates with their relationship with the Cartesian coordinates being given by  An arbitrary line element in this system is
An arbitrary line element in this system is 
Another important quantity is the volume element. This is obtained by multiplying a surface elent in the ρ−θ plane with dz. And is given by 
Spherical Coordinate system
For systems showing spherical symmetry, it is often convenient to use a spherical polar coordinates. The variables  and the associated unit vectors are shown in the figure.
and the associated unit vectors are shown in the figure.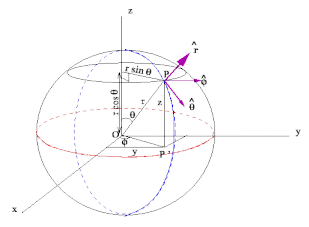
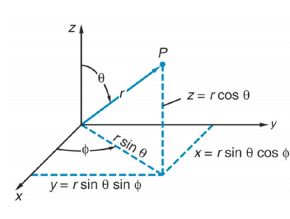
To define the coordinate system, choose the origin to be at the centre of a sphere with the Cartesian axis defined, as shown. An arbitrary point P is on the surface of a sphere of radius r so that OP=r, the radially outward direction OP is taken to be the direction of the vector  two coordinates are fixed as follows. The angle which OP makes with the z axis is the polar angle q and the direction perpendicular to OP along the direction of increasing θ is the direction of the unit vector
two coordinates are fixed as follows. The angle which OP makes with the z axis is the polar angle q and the direction perpendicular to OP along the direction of increasing θ is the direction of the unit vector  varies from 0 to π. The azimuthal angle φ is fixed as follows. We drop a perpendicular PP’ from P onto the xy plane. The foot of the perpendicular P’ lies in the xy plane. If we join OP’, the angle that OP’ makes with the x-axis is the angle φ Note that as the point P moves on the surface of the sphere keeping the angle θ fixed, i.e. as it describes a cone, the angle φ increases from a value 0 to 2π. The relationship between the spherical polar and the Cartesian coordinates is as follows :
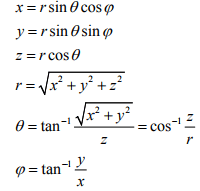
varies from 0 to π. The azimuthal angle φ is fixed as follows. We drop a perpendicular PP’ from P onto the xy plane. The foot of the perpendicular P’ lies in the xy plane. If we join OP’, the angle that OP’ makes with the x-axis is the angle φ Note that as the point P moves on the surface of the sphere keeping the angle θ fixed, i.e. as it describes a cone, the angle φ increases from a value 0 to 2π. The relationship between the spherical polar and the Cartesian coordinates is as follows :
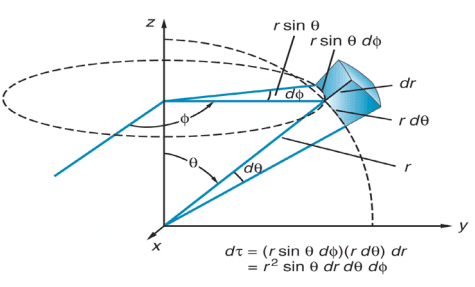
The volume element in the spherical polar is visualized as follows :
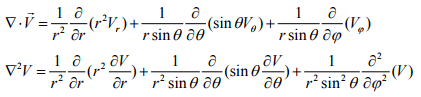
The expression for the divergence and the Laplacian in the spherical coordinates are given by
Delta function in three dimensions :
In three dimensions, the delta function is a straightforward generalization of that in one dimension

With the property
Where the region of integration includes the position 
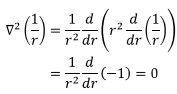
Example : In electrostatics we often use the delta function. In dealing with a point charge located at the origin, one comes up with a situation where one requires the Laplacian of the Coulomb potential, i.e. of 1/r. In the following we obtain 
Since the function does not have angular dependence we get, by direct differentiation, for r ≠ 0,
This is obviously not valid for r=0. To find out what happens at r=0, consider, integrating  over a sphere of radius R about the origin. R can have any arbitrary value. We have using, the divergence theorem,
over a sphere of radius R about the origin. R can have any arbitrary value. We have using, the divergence theorem,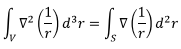
where the surface integral is over the surface of the sphere. Since, r=R on the surface of the sphere (and is non-zero), on the surface. We then have
on the surface. We then have

This implies that 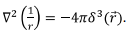
Tutorial Problems :
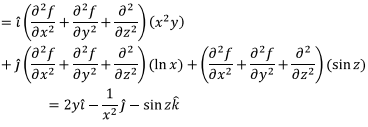
1. Calculate the Laplacian of 
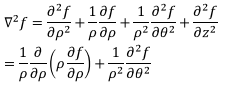
2. Obtain an expression for the Laplacian operator in the cylindrical coordinates.
3. Obtain the Laplacian of 
4. Show that 
5. Find the Laplacian of the vector field 
Solutions to Tutorial Problems :

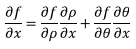
2. In cylindrical coordinates, the z-axis is the same as in Cartesian. Thus we need to only express  in polar coordinates and add
in polar coordinates and add  to the result. We have
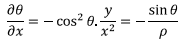
to the result. We have  We can thus write,
We can thus write,

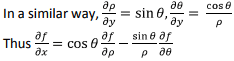
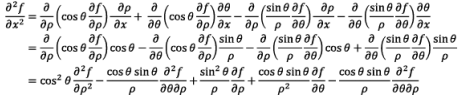
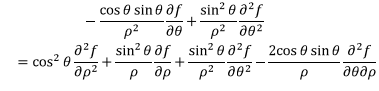
One can similarly calculate  and show that it is given by
and show that it is given by
Adding these terms and further adding the term 
3. In Cartesian coordinates  where we have used
where we have used 
The second derivative with respect to  adding the second differentiation with respect to y and z (which can be written by symmetry), we get
adding the second differentiation with respect to y and z (which can be written by symmetry), we get

Where we have used 
4. 

Adding three components result follows.
5. The Laplacian of a vector field is

Self Assessment Quiz
1. Evaluate 
2. Find the Laplacian of 
3. Determine 
4. Evaluate 
Answer to Self Assessment Quiz


 we get the result to be
we get the result to be 
2. Answer : 
3. 3. Only the delta function at x=0 contributes because the argument of the first delta function  is not in the limits of integration. The result is
is not in the limits of integration. The result is 
4. In this case is inside the limit of integration. Thus the result is 

|
10 videos|49 docs|56 tests
|
FAQs on Elements of Vector Calculus: Laplacian - Electromagnetic Fields Theory (EMFT) - Electrical Engineering (EE)
| 1. What is the Laplacian in vector calculus? |  |
| 2. How is the Laplacian operator applied in vector calculus? | |
| 3. What is the significance of the Laplacian in vector calculus? | |
| 4. How is the Laplacian operator related to second derivatives? | |
| 5. Can the Laplacian operator be applied to vector fields as well? | |



shortcuts and tricks
,MCQs
,Previous Year Questions with Solutions
,Free
,Summary
,Elements of Vector Calculus: Laplacian | Electromagnetic Fields Theory (EMFT) - Electrical Engineering (EE)
,Elements of Vector Calculus: Laplacian | Electromagnetic Fields Theory (EMFT) - Electrical Engineering (EE)
,Sample Paper
,Important questions
,Elements of Vector Calculus: Laplacian | Electromagnetic Fields Theory (EMFT) - Electrical Engineering (EE)
,mock tests for examination
,ppt
,Exam
,past year papers
,video lectures
,Semester Notes
,Viva Questions
,study material
,practice quizzes
,Extra Questions
,Objective type Questions
;






Elements of Vector Calculus: Laplacian Free PDF Download
Importance of Elements of Vector Calculus: Laplacian
Elements of Vector Calculus: Laplacian Notes
Elements of Vector Calculus: Laplacian Electrical Engineering (EE) Questions
Study Elements of Vector Calculus: Laplacian on the App
|
© EduRev
|
Education Revolution
|



|





