Generalized Coordinates - Lagrangian and Hamiltonian Equations, Classical Mechanics, CSIR-NET Physic | Physics for IIT JAM, UGC - NET, CSIR NET PDF Download

Consider again the motion of a simple pendulum. Since it is one dimensional, use arc length as a coordinate. Since radius is fixed, use the angular displacement, θ, as a generalized coordinate. The equation of motion involves  as it should, although the coordinate is dimensionless.
as it should, although the coordinate is dimensionless.
Problem 5: Simple pendulum Choose θ as the generalized coordinate for a simple pendulum.
What is an appropriate generalized momentum, so that its time derivative is equal to the force? What is the engineering dimension of the generalized momentum. Draw phase space trajectories for the pendulum: periodic motion corresponds to closed trajectories.
What is the dimension of the area enclosed by such a trajectory?
What is the physical interpretation of this area?
Many particles
Following the motion of N particles requires keeping track of N vectors, x1 , x2 , · · · , xN . The configuration space has 3N dimensions; the phase space has 6N dimensions. We say that there are 3N degrees of freedom. Phase space volume has engineering dimension of (energy × time)3N .
The equations of motion are
If these are subject to some non-holonomic constraints, then there is no reduction in the number of degrees of freedom. If there are M scalar equations expressing holonomic constraints, then the number of degrees of freedom reduces to D = 3N − M . There is a consequent change in the dimension of phase space and the engineering dimension of phase space volume.
Generalized coordinates
If there are M constraints of the form fα (x1 , x2 , · · · , xN ) = 0 with 1 ≤ α ≤ M , then all the coordinates of the N particles are given in terms of generalized coordinates qi where 1 ≤ i ≤ D = 3N − M .
In other words, one has N vector-valued functions xj = xj (q1 , q2 , · · · qD , t ). If the generalized coordinates are to provide a complete description of the dynamics then knowledge of all the qk should be equivalent to specifying all the xj . A counting of the number of scalar equations shows that this is possible.
Clearly, the velocities are
As a result one has the important identity
Generalized forces
The equations of motion are equivalent to the principle that if one makes an instantaneous virtual displacement of a mechanical system, then the work done by the forces goes into a change of the total kinetic energy. In other words
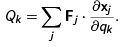
Now one can use the generalized coordinates to rewrite the work done by the forces

where one has defined the generalized forces
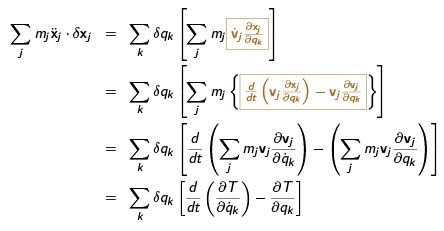
The change in kinetic energy
One can write
Equation of motion
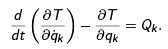
Since the virtual displacements of the generalized coordinates are all independent, one can set each coefficient independently to zero.
Then we have
If the particles move in a field of conservative forces then
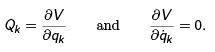
Then the equations of motion can be written in terms of the Lagrangian function L = T − V ,
Particle in an electromagnetic field
The Lorentz force on a particle in an electromagnetic field is

where q = charge, c = speed of light, v the velocity, E and B the electric and magnetic fields, and φ and A the scalar and vector potentials.
The Lagrangian formalism continues to be useful if one can write down a velocity dependent potential  such that
such that
Now using the identity

Dissipation
The problem of dissipative forces lies a little away from the developments made till now. However, models of frictional forces show that they are proportional to the velocity. Hence, for the dissipative forces on a body one may write the relation

This introduces the Rayleigh term,  , which is usually chosen to be quadratic in
, which is usually chosen to be quadratic in  The equations of motion are then written as
The equations of motion are then written as
In order to describe the motion of a body in a dissipative environment both the Lagrangian L and the Rayleigh term  need to be specified.
need to be specified.
FAQs on Generalized Coordinates - Lagrangian and Hamiltonian Equations, Classical Mechanics, CSIR-NET Physic - Physics for IIT JAM, UGC - NET, CSIR NET
| 1. What are generalized coordinates in classical mechanics? |  |
| 2. How do Lagrangian equations differ from Hamiltonian equations? | |
| 3. How are Lagrangian and Hamiltonian equations related to each other? | |
| 4. What is the significance of generalized coordinates in solving complex mechanical systems? | |
| 5. How are the Lagrangian and Hamiltonian equations used in physics research and practical applications? | |



video lectures
,Extra Questions
,ppt
,Objective type Questions
,practice quizzes
,Generalized Coordinates - Lagrangian and Hamiltonian Equations
,Viva Questions
,CSIR-NET Physic | Physics for IIT JAM
,Classical Mechanics
,mock tests for examination
,Classical Mechanics
,CSIR NET
,CSIR-NET Physic | Physics for IIT JAM
,MCQs
,Important questions
,past year papers
,Previous Year Questions with Solutions
,UGC - NET
,UGC - NET
,Classical Mechanics
,UGC - NET
,shortcuts and tricks
,Semester Notes
,Generalized Coordinates - Lagrangian and Hamiltonian Equations
,Free
,Summary
,Exam
,study material
,Sample Paper
,CSIR-NET Physic | Physics for IIT JAM
,Generalized Coordinates - Lagrangian and Hamiltonian Equations
,CSIR NET
,CSIR NET
;


Generalized Coordinates - Lagrangian and Hamiltonian Equations, Classical Mechanics, CSIR-NET Physic Free PDF Download
Importance of Generalized Coordinates - Lagrangian and Hamiltonian Equations, Classical Mechanics, CSIR-NET Physic
Generalized Coordinates - Lagrangian and Hamiltonian Equations, Classical Mechanics, CSIR-NET Physic Notes
Generalized Coordinates - Lagrangian and Hamiltonian Equations, Classical Mechanics, CSIR-NET Physic Physics Questions
Study Generalized Coordinates - Lagrangian and Hamiltonian Equations, Classical Mechanics, CSIR-NET Physic on the App
|
© EduRev
|
Education Revolution
|



|





