Ideal Frequency Selective Filters & Filter Specification | Signals and Systems - Electronics and Communication Engineering (ECE) PDF Download

In many applications of signal processing we want to change the relative amplitudes and frequency contents of a signal. This process is generally referred to as filtering. Since the Fourier transform of the output is product of input Fourier transform and frequency response of the system, we have to use appropriate frequency response.
Ideal frequency selective filters
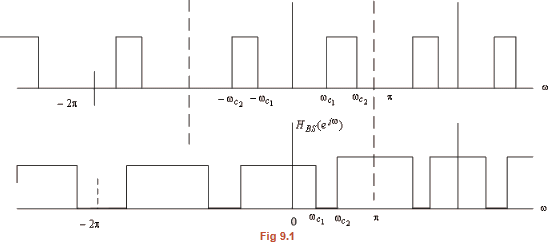
An ideal frequency reflective filter passes complex exponential signal. for a given set of frequencies and completely rejects the others. Figure (9.1) shows frequency response for ideal low pass filter (LPF), ideal high pass filter (HPF), ideal bandpass filter (BPF) and ideal backstop filter (BSF).
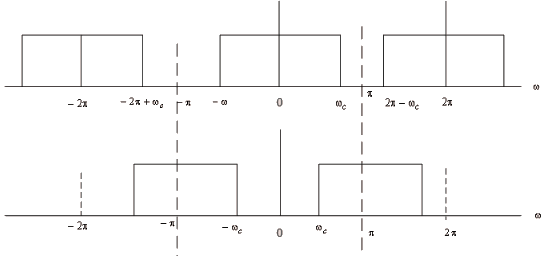
The ideal filters have a frequency response that is real and non-negative, in other words, has a zero phase characteristics. A linear phase characteristics introduces a time shift and this causes no distortion in the shape of the signal in the passband.
Since the Fourier transfer of a stable impulse response is continuous function of ω, can not get a stable ideal filter.
Filter specification
Since the frequency response of the realizable filter should be a continuous function, the magnitude response of a lowpass filter is specified with some acceptable tolerance. Moreover, a transition band is specified between the passband and stop band to permit the magnitude to drop off smoothly. Figure (9.2) illustrates this
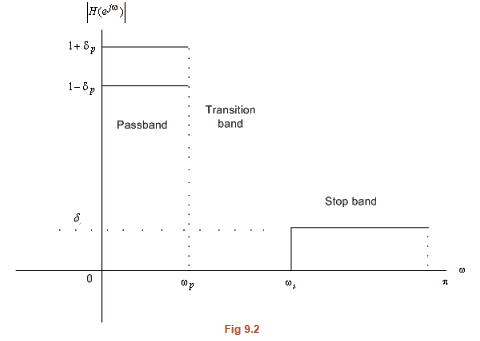
In the passband magnitude the frequency response is within  of unity
of unity

In the stopband

The frequencies  are respectively, called the passband edge frequency and the stopband edge frequency. The limits on tolerances
are respectively, called the passband edge frequency and the stopband edge frequency. The limits on tolerances  are called the peak ripple value. Often the specifications of digital filter are given in terms of the loss function
are called the peak ripple value. Often the specifications of digital filter are given in terms of the loss function  , in dB. The loss specification of digital filter are
, in dB. The loss specification of digital filter are
Some times the maximum value in the passband is assumed to be unity and the maximum passband deviation, denoted as
 is given the minimum value of the magnitude in passband. The maximum stopband magnitude is denoted by. The quantity
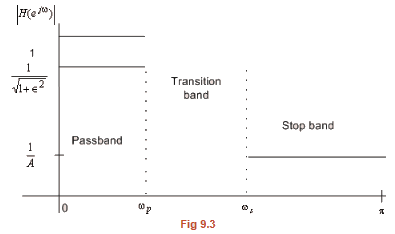
is given the minimum value of the magnitude in passband. The maximum stopband magnitude is denoted by. The quantity  is given by
is given by
These are illustrated in Fig(9.3)
If the phase response is not specified, one prefers to use IIR digital filter. In case of an IIR filter design, the most common practice is to convert the digital filter specifications to analog low pass prototype filter specifications, to determine the analog low pass transfer function Ha(s) meeting these specifications, and then to transform it into desired digital filter transfer function. This methods is used for the following reasons:
- Analog filter approximation techniques are highly advanced.
- They usually yield closed form solutions.
- Extensive tables are available for analog-design.
- Many applications require the digital solutions of analog filters.
The transformations generally have two properties (1) the imaginary axis of the s-plane maps into unit circle of the z-plane and (2) a stable continuous time filter is transformed to a stable discrete time filter
|
36 videos|117 docs|63 tests
|
FAQs on Ideal Frequency Selective Filters & Filter Specification - Signals and Systems - Electronics and Communication Engineering (ECE)
| 1. What are frequency selective filters? |  |
| 2. What are the ideal characteristics of frequency selective filters? | |
| 3. What are the common types of frequency selective filters? | |
| 4. What are some applications of frequency selective filters? | |
| 5. What are the key specifications to consider when choosing a frequency selective filter? | |


Viva Questions
,past year papers
,Previous Year Questions with Solutions
,MCQs
,Ideal Frequency Selective Filters & Filter Specification | Signals and Systems - Electronics and Communication Engineering (ECE)
,Extra Questions
,Exam
,Important questions
,Semester Notes
,Sample Paper
,Objective type Questions
,mock tests for examination
,Free
,study material
,shortcuts and tricks
,video lectures
,ppt
,Summary
,practice quizzes
,Ideal Frequency Selective Filters & Filter Specification | Signals and Systems - Electronics and Communication Engineering (ECE)
,Ideal Frequency Selective Filters & Filter Specification | Signals and Systems - Electronics and Communication Engineering (ECE)
;


Ideal Frequency Selective Filters & Filter Specification Free PDF Download
Importance of Ideal Frequency Selective Filters & Filter Specification
Ideal Frequency Selective Filters & Filter Specification Notes
Ideal Frequency Selective Filters & Filter Specification Electronics and Communication Engineering (ECE) Questions
Study Ideal Frequency Selective Filters & Filter Specification on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!