Impulse Invariance Method | Signals and Systems - Electronics and Communication Engineering (ECE) PDF Download

Impulse Invariance Method
H(z) (at z =e ST ) = ∑h(n)e - STn
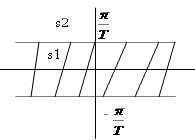
If the real part is same, imaginary part is differ by integral multiple of  this is the biggest disadvantage of Impulse Invariance method.
this is the biggest disadvantage of Impulse Invariance method.
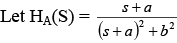
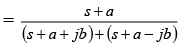
hA(t) =e-at Cosbt for t ≥ 0 s1 = -a-jb
= 0 otherwise



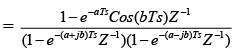
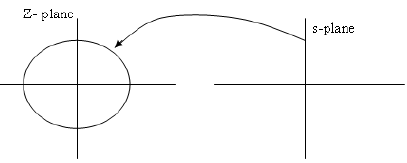
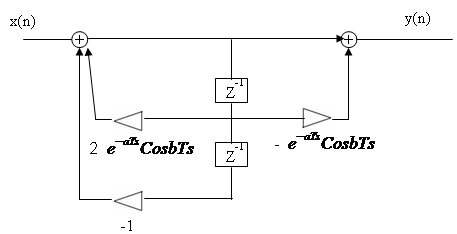
The pole located at s=p is transformed into a pole in the Z-plane at Z = e PTS, however, the finite zero located in the s-plane at s= -a was not converted into a zero in the z-plane at Z = e-aTs , although the zero at s=∞ was placed at z=0.
Desing a Chebyshev LPF using Impulse-Invariance Method.
[The freq response for analog filter we plotted over freq range 0 to 10000 π. To set the discrete-time freq range  , therefore Ts =10-4
, therefore Ts =10-4


Methods to convert analog filters into Digital filters:
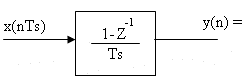
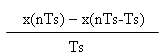
1. By approximation of derivatives


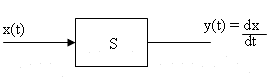
Or
Using forward-difference mapping based on first order approximation Z = e sTs≌ 1+STs

Using backward- difference mapping is based on first order approximation
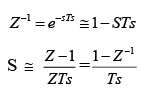
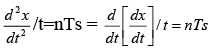
= 
Therefore H(z) =  using backward difference
using backward difference
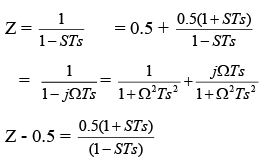
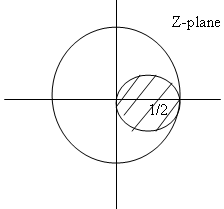
lz - 0.5| = 0.5 is mapped into a circle of radius 0.5, centered at Z=0.5
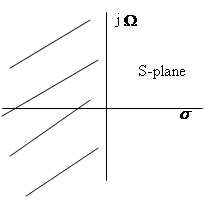
Using Forward-difference
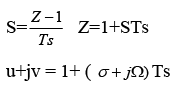
if σ =0 u=1 and j Ω axis maps to Z=1
If σ >0, then u>1, the RHS-plane maps to right of z=1.
If σ <0, then u<1, the LHS-plane maps to left of z=1.
The stable analog filter may be unstable digital filter.
Bilinear Transformation
- Provides a non linear one to one mapping of the frequency points on the jw axis in s -plane to those on the unit circle in the z-plane.
- This procedure also allows us to implement digital HP filters from their analog
counter parts.
{Using trapezoidal rule y(n)=y(n-1)+0.5Ts[x(n)+x(n-1)]
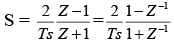
H(Z)=2(Z-1) / [Ts(Z+1)] }
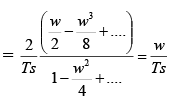
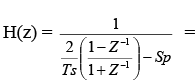
To find H(z), each occurrence of S in HA(s) is replaced by 
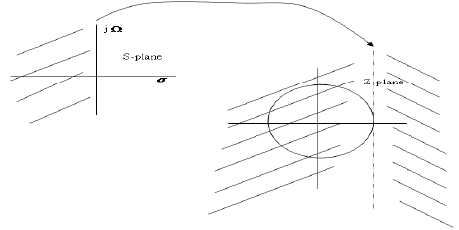
The entire j Ω axis in the s-plane - ∞ <j Ω<∞ maps exactly once onto the unit circle - π< w ≤ π such that there is a one to one correspondence between the continuous -time and discrete time frequency points. It is this one to one mapping that allows analog HPF to be implemented in digital filter form.
As in the impulse invariance method, the left half of s-plane maps on to the inside of the unit circle in the z-plane and the right half of s-plane maps onto the outside.
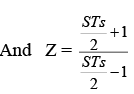
In Inverse relationship is 
For smaller value of frequency 
(B.W of higher freq pass band will tend to reduce disproportionately)
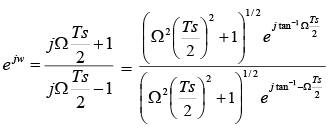
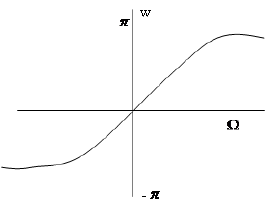
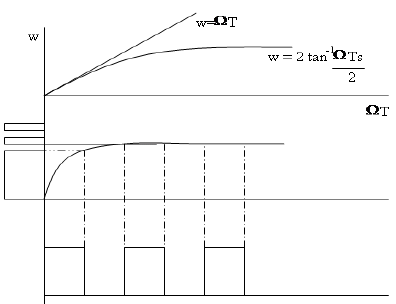
The mapping is ≌ linear for small Ω and w. For larger freq values, the non linear compression that occurs in the mapping of Ω to w is more apparent. This compression causes the transfer function at the high Ω freq to be highly distorted when it is translated to
the w-domain.
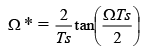
Prewarping Procedure:
When the desired magnitude response is piece wise constant over frequency, this compression can be compensated by introducing a suitable prescaling or prewarping to the Ω freq scale. Ω scale is converted into Ω * scale.
We now derive the rule by which the poles are mapped from the s-plane to the z-plane.

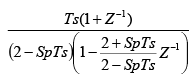
A pole at S=Sp in the s-plane gets mapped into a zero at z= -1 and a pole at Z = 
Ex:
Chebyshev LPF design using the Bilinear Transformation
Pass band:
-1<|H ( jΩ)|dB≤0 for 0 ≤ Ω ≤ 1404π=4411 rad
Stop band:
|H ( jΩ)| dB < -60 for Ω ≥ 8268 π rad/sec =25975 rad/s
Let the Ts = 10-4 sec
Prewarping values are
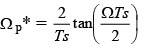 = 2*104 tan(0.0702π ) = 4484 rad/sec
= 2*104 tan(0.0702π ) = 4484 rad/sec
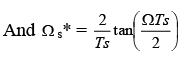 = 2*104 tan(0.4134π ) = 71690 rad/sec
= 2*104 tan(0.4134π ) = 71690 rad/sec
The modified specifications are
Pass band:
-1<lH ( jΩ*)|dB≤ 0 for 0 ≤ Ω * ≤ 4484 rad/s
Stop band:
|H ( jΩ*)| dB < - 60 for Ω *≥ 71690rad/sec
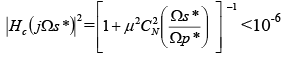
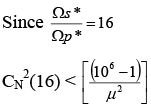
Value of μ : is determined from the pass band ripple 10log (1 + m -2 ) -1 > -1dB
μ= 0.508
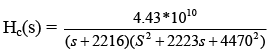
Value of N: is determined from
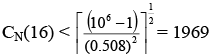
C3(16) = 16301
N = 3 is sufficient
Using Impulse Invariance method a value of N=4 was required.
ρ=4.17
Major R = 
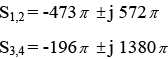
Since there are three poles, the angles are 
S1 = r cosθ + j Rsinθ = -2216

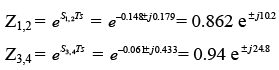
Pole Mapping
At S=S1
In the Z-plane there is zero at Z = -1 and pole at Z = 
S2,3 = there are two zeros at Z=-1

Pole Mapping Rules:
Hz(z) = 1-CZ-1 zero at Z=C and pole at Z = 0
 pole ar Z=d and zero at z=0
pole ar Z=d and zero at z=0
C and d can be complex-valued number.
Pole Mapping for Low-Pass to Low Pass Filters
Applying low pass to low pass transformation to Hz(z) α we get
The low pass zero at z=c is transformed into a zero at z=C1 where C1 = 
And pole at z=0 is Z=α
Similarly,
Zero at z=0 => z =α


|
36 videos|78 docs|63 tests
|
FAQs on Impulse Invariance Method - Signals and Systems - Electronics and Communication Engineering (ECE)
| 1. What is the impulse invariance method? |  |
| 2. How does the impulse invariance method work? | |
| 3. What are the advantages of using the impulse invariance method? | |
| 4. What are the limitations of the impulse invariance method? | |
| 5. How can the impulse invariance method be used in practical applications? | |


Extra Questions
,shortcuts and tricks
,MCQs
,Sample Paper
,Summary
,Previous Year Questions with Solutions
,Semester Notes
,practice quizzes
,Viva Questions
,Objective type Questions
,ppt
,Impulse Invariance Method | Signals and Systems - Electronics and Communication Engineering (ECE)
,past year papers
,Impulse Invariance Method | Signals and Systems - Electronics and Communication Engineering (ECE)
,study material
,mock tests for examination
,Free
,Exam
,Impulse Invariance Method | Signals and Systems - Electronics and Communication Engineering (ECE)
,Important questions
,video lectures
;


Impulse Invariance Method Free PDF Download
Importance of Impulse Invariance Method
Impulse Invariance Method Notes
Impulse Invariance Method Electronics and Communication Engineering (ECE) Questions
Study Impulse Invariance Method on the App
|
© EduRev
|
Education Revolution
|



|





