Interconnected Synchronous Generators - 2 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE) PDF Download

Electrical load diagram.
The electrical load diagram is shown in Fig. 42. The phasor V represents the constant voltage of the infinite bus-bars. At the extremity of V is drawn an axis showing the direction of the Ia Zs drops—i.e. the voltage drops for unity-power-factor output currents. This axis must be drawn at the angle θ = arc tan(Xs/r) to V , to scale along the axis is a distance corresponding to, say, full load at unity power factor. At this point a line is drawn at right angles to the axis. It is the locus of the E values for constant power, or constant-electricalpower line. Other parallel lines are drawn for other loads, one through the extremity of V itself corresponding to zero power output, others on the right-hand side of V corresponding to negative power output, i.e. input to the machine as a motor.
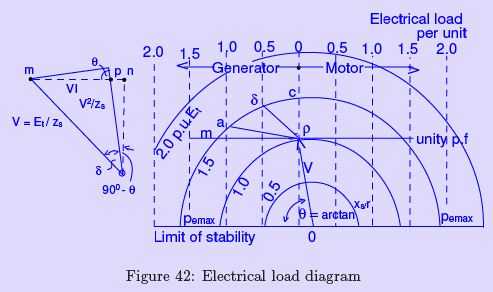
The diagram solves Eqn. 52. Consider the full-load unity-power- factor case in Fig. 40, and multiply each complex voltage by the constant (V /Zs). This gives the inset in Fig. 42, from which V I = P = mp = mn − np. Now mn = (E V /Zs) sin(90◦ − θ + δ) and np = (V 2/Zs) cos θ, so that P is given directly by Eqn. 52.
If the excitation be fixed, the extremity of the e.m.f. vector E , will have a circular locus as indicated by the circular arcs struck with O as centre. Taking 1.0 per unit E as that for which E = V on no load and no current, the per-unit excitation for any other loading condition can be found from the diagram. Thus with 1.5 per unit excitation, the machine will work on full-load power as a generator with a power factor of cos 8◦ lagging; on half-fun-load power with a power factor of cos 42◦ lagging; and on zero power output with a power-factor of zero lagging, as shown by the lines pa, pb and pc. The variation of the power output (controlled by the input from the prime mover in the case of a generator and by the load applied to the shaft for a motor) with constant excitation is thl1S accompanied by changes in the load power factor.
If the generator be provided with greater mechanical power with say, 150 per cent (or 1.5 per unit) excitation, then the output power increases with reducing power factor from lagging values until, with an output (for this case) of 1.2 per unit power (see Fig. 42), the power factor becomes unity. Thereafter the power increases with a reducing power factornow leading. Finally the excitation will not include any more constant-power lines, for the circle of its locus becomes tangential to these. If more power is supplied by the prime mover, the generator will be forced to rise out of step, and synchronous running will be lost.
The maximum power that can be generated is indicated by intercepts on the limit of stability. The typical point Pemax on the left of the load diagram is for an excitation of 1.5 per unit.
Similarly, if a motor is mechanically overloaded it will fall out of step, because of its limited electrical power intake. The point Pemax in the motor region again corresponds to 1.5 per unit excitation, and all such points again lie on the limiting-stability line. This maximum power input includes I2R loss, and the remainder-the mechanical power output-in fact becomes itself limited before maximum electrical input can be attained.
Mechanical load diagram
The mechanical load, or electromagnetically-converted power P1 of Eqn. 52, is for a generator the net mechanical input. For a motor it is the gross mechanical output including core friction and windage loss. A diagram resembling that of Fig. 42 could be devised* by. resolving the current along E to give P1 = E I cos(θ + φ). But as the terminal voltage V is taken to be constant, a new circle with another centre is needed for each value of E selected.
The following method obtains the mechanical loading from the difference I2r between P and P1.
The input to a motor is P = V1I cos φ. The electro-magnetic or converted or developed power, which includes the losses due to rotation, is P1 = V1 I cos φ. From the latter,
 (54)
(54)
giving
 (55)
(55)
For each power factor cos φ, and given voltage V1 and electro-magnetic power P1, there are two values of current, one leading and one lagging. The complexor diagrams, Fig. 43 and Fig. 45, show that there will be two corresponding values of excitation E one large and one small, associated respectively with leading and lagging reactive current components Ir = I sin φ. At the same time the increased I 2R loss for power factors less than unity requires the active component Ia = I cos φ to be larger. The locus of I then forms an O-curve, while the plot of the current magnitude to a base of excitation E gives a V -curve, Fig. 46.
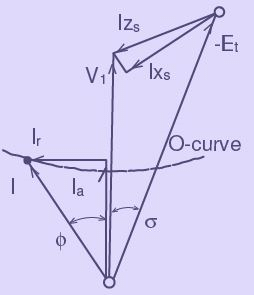
Figure 43: Synchronous motor with constant output and variable excitation -Leading current
The O-curves are circular arcs, because Eqn. 55 represents the equation to a circle.
Writing
 (56)
(56)
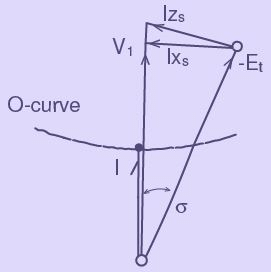
Figure 44: Synchronous motor with constant output and variable excitation- Unity p.f
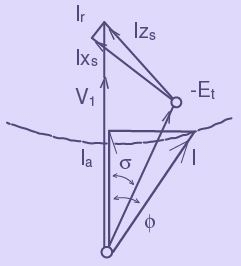
Figure 45: Synchronous motor with constant output and variable excitation-Lagging current
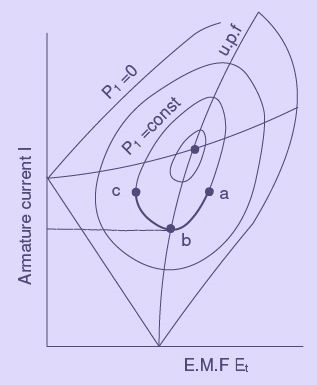
Figure 46: Synchronous motor with constant output and variable excitation-V-curves
it is seen that I must lie on a circle centred at a point distant V1 /2r from the origin the axis of I cos φ, the radius of the circle being p
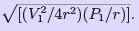 The construction of the mechanical load diagram is given in Fig. 47. Let OM = V1 /2r to scale: draw with M as centre a circle of radius OM. This circle, from Eqn. 55, corresponds to P I = 0, a condition for M which the circle radius is V1/2r. The circle thus represents the current locus for zero mechanical power. Any smaller circle on centre M represents the current locus for some constant , mechanical power output P1.
The construction of the mechanical load diagram is given in Fig. 47. Let OM = V1 /2r to scale: draw with M as centre a circle of radius OM. This circle, from Eqn. 55, corresponds to P I = 0, a condition for M which the circle radius is V1/2r. The circle thus represents the current locus for zero mechanical power. Any smaller circle on centre M represents the current locus for some constant , mechanical power output P1.
For unity power factor
 (57)
(57)
Again there are in general two values O-CURVES of current for each power output P1, the smaller OQn in the working range, the greater OQm above the limit of stability.
If  , there is a single value of current I = V1/2r corresponding to the maximum power
, there is a single value of current I = V1/2r corresponding to the maximum power  . The power circle has shrunk to zero radius and becomes in fact the point M . The efficiency is 50 per cent, the I 2R loss being equal to the mechanical output. Such a condition is well outside the normal working range, not only because of heating but also because the stability is critical. The case corresponds to the requirement of the maximum-power-transfer theorem, commonly employed to determine maximum-poweroutput conditions in telecommunication circuits.
. The power circle has shrunk to zero radius and becomes in fact the point M . The efficiency is 50 per cent, the I 2R loss being equal to the mechanical output. Such a condition is well outside the normal working range, not only because of heating but also because the stability is critical. The case corresponds to the requirement of the maximum-power-transfer theorem, commonly employed to determine maximum-poweroutput conditions in telecommunication circuits.
The completed mechanical load diagram is shown in Fig. 48, with the addition of OR = V /Zs drawn at angle arc cos(r/Zs) to OM . Circles drawn with R as centre represent constant values of E1 /Zs, or E , or the field excitation.
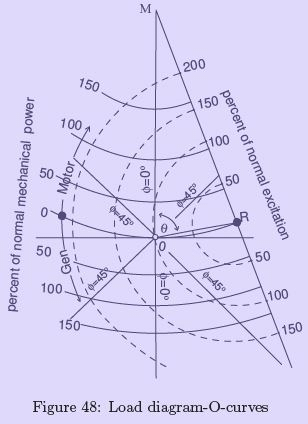
O-Curves and V -Curves.
The current loci in Fig. 48 are continued below the base line for generator operation. The horizontal lines of constant mechanical power are now constant input (from the prime mover) and a departure from unity-power-factor working, giving increased currents, increases the I 2R loss and lowers the available electrical output. The whole system of lines depends, of course, on constant bus-bar voltage. The circular current loci are called the O - curves for
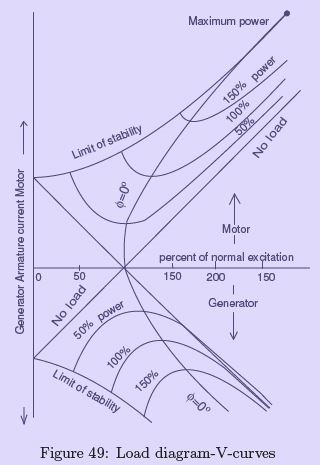
constant mechanical power. Any point P on the diagram, fixed by the percentage excitation and load, gives by the line OP the current to scale in magnitude and phase. Directly from the O-curves, Fig. 48, the V -curves, relating armature current and excitation for various constant mechanical loads can be derived. These are shown in Fig. 49.
|
23 videos|94 docs|42 tests
|



Extra Questions
,Objective type Questions
,Interconnected Synchronous Generators - 2 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,mock tests for examination
,Semester Notes
,video lectures
,Previous Year Questions with Solutions
,Important questions
,Sample Paper
,Interconnected Synchronous Generators - 2 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,study material
,Summary
,MCQs
,Viva Questions
,Free
,Interconnected Synchronous Generators - 2 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,Exam
,shortcuts and tricks
,practice quizzes
,ppt
,past year papers
;


Interconnected Synchronous Generators - 2 Free PDF Download
Importance of Interconnected Synchronous Generators - 2
Interconnected Synchronous Generators - 2 Notes
Interconnected Synchronous Generators - 2 Electrical Engineering (EE) Questions
Study Interconnected Synchronous Generators - 2 on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!