Inverse Laplace & Z-Transform of Rational Functions | Signals and Systems - Electrical Engineering (EE) PDF Download

Inverse Laplace transform :: Rational functions
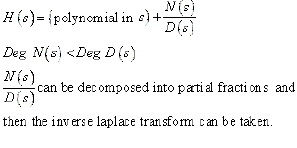
Consider an arbitrary rational polynomial in Laplace Transform
Examples:
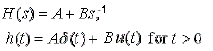
1) Let us consider the function in s:
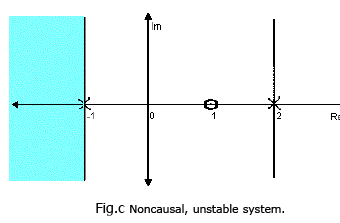
2) Let us consider an LTI system with system function:
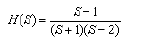
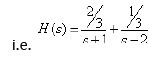
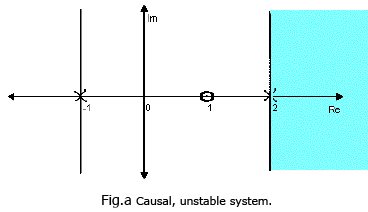
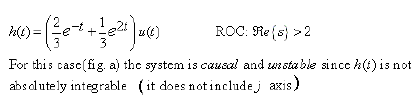
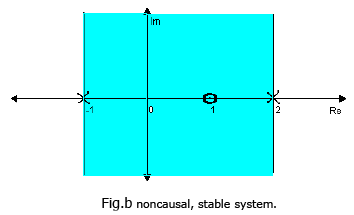
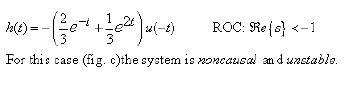
As the ROC has not been specified. there are several different ROCs and correspondingly, several different system impulses. Possible ROCs for the system with poles at s = -1and s = 2 and a zero at s = 1

Conclusions:
Properties of certain class of systems can be explained simply in terms of the locations of the poles. Particularly, consider a causal LTI system with a rational system function H(s). Since the system is causal, the ROC is to the right of the right most pole. Consequently, for this system to be stable (i.e. for the ROC to include the j-axis), the right most pole of H(s) must be to the left of the j-axis. i.e.
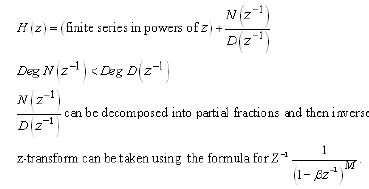
Inverse Z - transform: Consider an arbitrary rational z-transform:
Example 1:
Consider the z transform
Example :
Consider the z transform
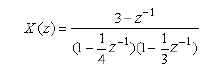
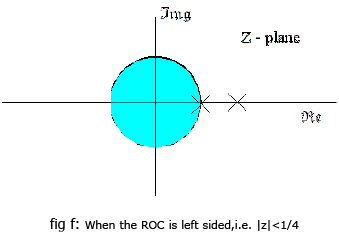
There are two poles one at z=1/4 and at z=1/3. The partial fraction expansion, expressed in polynomials in 1/z, is
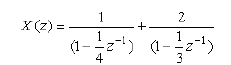
Thus, x[n] is the sum of 2 terms, one with z - transform 1/[1-(1/4z)] and the other with z - transform 2/[1-(1/3z)]. Thus,

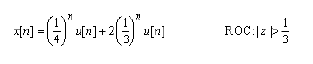
As the ROC is not mentioned, we get different inverses for different possible ROCs. We do not discuss causality and stability as this may not be a system function. One possible inverse is worked out, the other two left as an exercise to the reader.
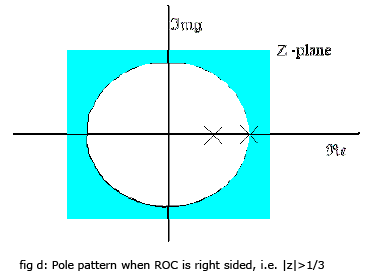
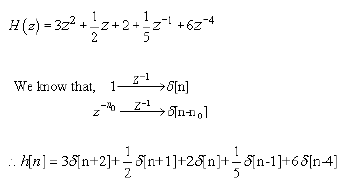
We can identify by inspection ,
Conclusion:
In this lecture you have learnt:
- if the system is causal then the ROC extends from the right most pole to infinity.
- A system is stable if the ROC includes the imaginary axis and therefore the right most pole of 'H(s)' must be to the left of the imaginary axis
- A causal system with a rational function 'H(s)' is stable if and only if all poles of H(s) lie in the left-half of the s-plane and must include the unit radius circle in the z-plane.
|
41 videos|70 docs|33 tests
|
FAQs on Inverse Laplace & Z-Transform of Rational Functions - Signals and Systems - Electrical Engineering (EE)
| 1. What is the inverse Laplace transform? |  |
| 2. How do you find the inverse Laplace transform of a rational function? | |
| 3. What is the z-transform? | |
| 4. How do you find the z-transform of a rational function? | |
| 5. What is the relationship between the Laplace transform and the z-transform? | |



practice quizzes
,Semester Notes
,study material
,ppt
,Exam
,Extra Questions
,MCQs
,shortcuts and tricks
,past year papers
,Inverse Laplace & Z-Transform of Rational Functions | Signals and Systems - Electrical Engineering (EE)
,Previous Year Questions with Solutions
,Sample Paper
,Summary
,Free
,Inverse Laplace & Z-Transform of Rational Functions | Signals and Systems - Electrical Engineering (EE)
,Objective type Questions
,video lectures
,Important questions
,mock tests for examination
,Viva Questions
,Inverse Laplace & Z-Transform of Rational Functions | Signals and Systems - Electrical Engineering (EE)
;






Inverse Laplace & Z-Transform of Rational Functions Free PDF Download
Importance of Inverse Laplace & Z-Transform of Rational Functions
Inverse Laplace & Z-Transform of Rational Functions Notes
Inverse Laplace & Z-Transform of Rational Functions Electrical Engineering (EE) Questions
Study Inverse Laplace & Z-Transform of Rational Functions on the App
|
© EduRev
|
Education Revolution
|



|





