
Best Study Material for Electrical Engineering (EE) Exam
Electrical Engineering (EE) Exam > Electrical Engineering (EE) Notes > Lecture 1 - Introduction to Digital Control
Lecture 1 - Introduction to Digital Control - Electrical Engineering (EE) PDF Download
Lecture 1 - Introduction to Digital Control, Control Systems
1 Digital Control System
A digital control system model can be viewed from different perspectives including control algorithm, computer program, conversion between analog and digital domains, system performance etc. One of the most important aspects is the sampling process level.
In continuous time control systems, all the system variables are continuous signals. Whether the system is linear or nonlinear, all variables are continuously present and therefore known (available) at all times.A typical continuous time control system is shown in Figure 1.

Figure 1: A typical closed loop continuous time control system
In a digital control system, the control algorithm is implemented in a digital computer. The error signal is discretized and fed to the computer by using an A/D (analog to digital) converter.
The controller output is again a discrete signal which is applied to the plant after using a D/A (digital to analog) converter. General block diagram of a digital control system is shown in Figure 2.
e(t) is sampled at intervals of T . In the context of control and communication, sampling is a process by which a continuous time signal is converted into a sequence of numbers at discrete time intervals. It is a fundamental property of digital control systems because of the discrete nature of operation of digital computer.
Figure 3 shows the structure and operation of a finite pulse width sampler, where (a) represents the basic block diagram and (b) illustrates the function of the same. T is the sampling period and p is the sample duration.
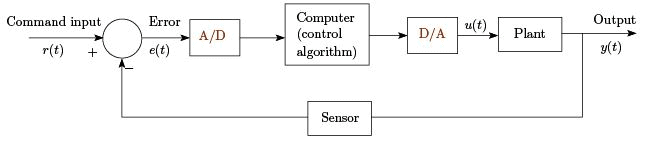
Figure 2: General block diagram of a digital control system
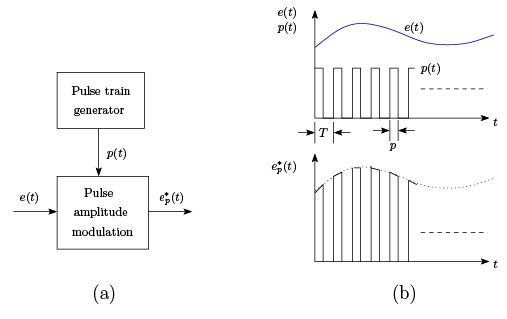
Figure 3: Basic structure and operation of a finite pulse width sampler
In the early development, an analog system, not containing a digital device like computer,in which some of the signals were sampled was referred to as a sampled data system. With the advent of digital computer, the term discrete-time system denoted a system in which all its signals are in a digital coded form. Most practical systems today are of hybrid nature, i.e., contains both analog and digital components.
Before proceeding to any depth of the sub ject we should first understand the reason behind going for a digital control system. Using computers to implement controllers has a number of advantages. Many of the difficulties involved in analog implementation can be avoided. Few of them are enumerated below.
1. Probability of accuracy or drift can be removed.
2. Easy to implement sophisticated algorithms.
3. Easy to include logic and nonlinear functions.
4. Reconfigurability of the controllers.
1.1 A Naive Approach to Digital Control
One may expect that a digital control system behaves like a continuous time system if the sampling period is sufficiently small. This is true under reasonable assumptions. A crude way to obtain digital control algorithms is by writing the continuous time control law as a differential equation and approximating the derivatives by differences and integrations by summations.
This will work when the sampling period is very small. However various parameters, like overshoot, settling time will be slightly higher than those of the continuous time control.
Example: PD controller
A continuous time PD controller can be discretized as follows:
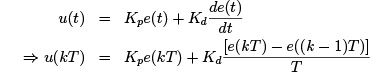
where k represents the discrete time instants and T is the discrete time step or the sampling period. We will see later the control strategies with different behaviors, for example deadbeat control, can be obtained with computer control which are not possible with a continuous time control.
1.2 Aliasing
Stable linear systems have property that the steady state response to sinusoidal excitations is sinusoidal with same frequency as that of the input. But digital control systems behave in a much more complicated way because sampling will create signals with new frequencies.
Aliasing is an effect of the sampling that causes different signals to become indistinguishable.
Due to aliasing, the signal reconstructed from samples may become different than the original continuous signal. This can drastically deteriorate the performance if proper care is not taken.
2 Inherently Sampled Systems
Sampled data systems are natural descriptions for many phenomena. In some cases sampling occurs naturally due to the nature of measurement system whereas in some cases it occurs because information is transmitted in pulsed form. The theory of sampled data systems thus has many applications.
1. Radar: When a radar antenna rotates, information about range and direction is naturally obtained once per revolution of the antenna.
2. Economic Systems: Accounting procedures in economic systems are generally tied to the calendar. Information about important variables is accumulated only at certain times,
e.g., daily, weekly, monthly, quarterly or yearly even if the transactions occur at any point of time.
3. Biological Systems: Since the signal transmission in the nervous system occurs in pulsed form, biological systems are inherently sampled.
All these discussions indicate the need for a separate theory for sampled data control systems or digital control systems.
3 How Was Theory Developed ?
1. Sampling Theorem: Since all computer controlled systems operate at discrete times only, it is important to know the condition under which a signal can be retrieved from its values at discrete points. Nyquist explored the key issue and Shannon gave the complete solution which is known as Shannon’s sampling theorem. We will discuss Shannon’s sampling theorem in proceeding lectures.
2. Difference Equations and Numerical Analysis: The theory of sampled-data system is closely related to numerical analysis. Difference equations replaced the differential equations in continuous time theory. Derivatives and integrals are evaluated numerically by approximating them with differences and sums.
3. Transform Methods: Z-transform replaced the role of Laplace transform in continuous domain.
4. State Space Theory: In late 1950’s, a very important theory in control system was developed which is known as state space theory. The discrete time representation of state models are obtained by considering the systems only at sampling points.
The document Lecture 1 - Introduction to Digital Control - Electrical Engineering (EE) is a part of Electrical Engineering (EE) category.
All you need of Electrical Engineering (EE) at this link: Electrical Engineering (EE)

FAQs on Lecture 1 - Introduction to Digital Control - Electrical Engineering (EE)
| 1. What is digital control? |  |
| 2. How does digital control differ from analog control? | |
Ans. Digital control differs from analog control in that it uses discrete values and algorithms to process and manipulate signals, while analog control uses continuous values. Digital control provides better accuracy, flexibility, and ease of implementation compared to analog control.
| 3. What are the advantages of digital control systems? | |
Ans. Digital control systems offer several advantages, including the ability to implement complex control algorithms, precise control over system behavior, ease of modification and reconfiguration, immunity to noise and environmental disturbances, and the ability to integrate with other digital systems.
| 4. What are the main components of a digital control system? | |
Ans. The main components of a digital control system include sensors or transducers to measure system variables, an analog-to-digital converter to convert analog signals into digital form, a microprocessor or digital controller to process the signals, a digital-to-analog converter to convert digital control signals into analog form, and actuators to act upon the system.
| 5. How is stability achieved in digital control systems? | |
Ans. Stability in digital control systems is achieved by carefully designing the control algorithm and adjusting the sampling rate. The control algorithm must ensure that the system remains stable under all operating conditions, and the sampling rate must be chosen to avoid aliasing and satisfy the Nyquist criterion. Additionally, techniques such as feedback control and pole-zero cancellation can be employed to enhance stability.
About this Document

2.8K Views

4.78/5
Rating

Apr 07, 2025
Last updated
Document Description: Lecture 1 - Introduction to Digital Control for Electrical Engineering (EE) 2025 is part of Electrical Engineering (EE) preparation. The notes and questions for Lecture 1 - Introduction to Digital Control have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Lecture 1 - Introduction to Digital Control covers topics like and Lecture 1 - Introduction to Digital Control Example, for Electrical Engineering (EE) 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Lecture 1 - Introduction to Digital Control.
Introduction of Lecture 1 - Introduction to Digital Control in English is available as part of
our Electrical Engineering (EE) preparation & Lecture 1 - Introduction to Digital Control in Hindi for Electrical Engineering (EE)
courses. Download more important topics, notes, lectures and mock test series for Electrical Engineering (EE)
Exam by signing up for free. Electrical Engineering (EE): Lecture 1 - Introduction to Digital Control - Electrical Engineering (EE)
Description
Full syllabus notes, lecture & questions for Lecture 1 - Introduction to Digital Control - Electrical Engineering (EE) - Electrical Engineering (EE) | Plus excerises question with solution to help you revise complete syllabus | Best notes, free PDF download
Information about Lecture 1 - Introduction to Digital Control
In this doc you can find the meaning of Lecture 1 - Introduction to Digital Control defined & explained in the simplest way possible.
Besides explaining types of Lecture 1 - Introduction to Digital Control theory,
EduRev gives you an ample number of questions to practice Lecture 1 - Introduction to Digital Control tests, examples and also practice Electrical Engineering (EE) tests.
Download as PDF
Top Courses for Electrical Engineering (EE)

Related Searches
Lecture 1 - Introduction to Digital Control - Electrical Engineering (EE)
,ppt
,past year papers
,Exam
,video lectures
,Summary
,study material
,practice quizzes
,Free
,Sample Paper
,mock tests for examination
,Previous Year Questions with Solutions
,Important questions
,MCQs
,Viva Questions
,Extra Questions
,Objective type Questions
,Semester Notes
,shortcuts and tricks
,Lecture 1 - Introduction to Digital Control - Electrical Engineering (EE)
,Lecture 1 - Introduction to Digital Control - Electrical Engineering (EE)
;


Additional Information about Lecture 1 - Introduction to Digital Control for Electrical Engineering (EE) Preparation
Lecture 1 - Introduction to Digital Control Free PDF Download
The Lecture 1 - Introduction to Digital Control is an invaluable resource that delves deep into the core of the Electrical Engineering (EE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Lecture 1 - Introduction to Digital Control now and kickstart your journey towards success in the Electrical Engineering (EE) exam.
Importance of Lecture 1 - Introduction to Digital Control
The importance of Lecture 1 - Introduction to Digital Control cannot be overstated, especially for Electrical Engineering (EE) aspirants.
This document holds the key to success in the Electrical Engineering (EE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Lecture 1 - Introduction to Digital Control Notes
Lecture 1 - Introduction to Digital Control Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Lecture 1 - Introduction to Digital Control.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Lecture 1 - Introduction to Digital Control Notes on EduRev are your ultimate resource for success.
Lecture 1 - Introduction to Digital Control Electrical Engineering (EE) Questions
The "Lecture 1 - Introduction to Digital Control Electrical Engineering (EE) Questions" guide is a valuable resource for all aspiring students preparing for the
Electrical Engineering (EE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Lecture 1 - Introduction to Digital Control on the App
Students of Electrical Engineering (EE) can study Lecture 1 - Introduction to Digital Control alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Lecture 1 - Introduction to Digital Control,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Lecture 1 - Introduction to Digital Control is prepared as per the latest Electrical Engineering (EE) syllabus.
|
© EduRev
|
Education Revolution
|



|







Signup on EduRev and stay on top of your study goals
10M+ students crushing their study goals daily