Previous Year Questions- Concepts of Stability | Control Systems - Electrical Engineering (EE) PDF Download

Q1: The characteristic equation of a linear time-invariant (LTI) system is given by
Δ(s) = s4 + 3s3 + 3s2 + s + k = 0
The system is BIBO stable if (2019)
(a) 0 < k < (12/9)
(b) k > 3
(c) 0 < k < (8/9)
(d) k > 6
Ans: (c)
Sol: Routh array is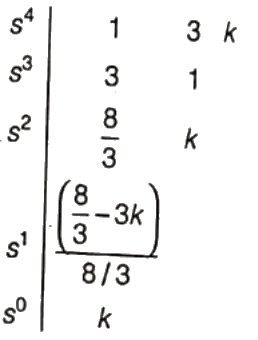 For BIBO stability,
For BIBO stability,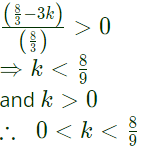
Q2: The number of roots of the polynomial,
s7 + s6 + 7s5 + 14s4 + 31s3 + 73s2 + 25s + 200,
in the open left half of the complex plane is (2018)
(a) 3
(b) 4
(c) 5
(d) 6
Ans: (a)
Sol: Characteristic equation, s7 + s6 + 7s5 + 14s4 + 31s3 + 73s2 + 25s + 200 = 0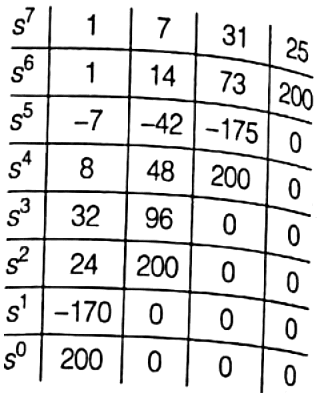 Auxillary equation, A(s) = 8s4 + 48s2 + 200
Auxillary equation, A(s) = 8s4 + 48s2 + 200
Total number of poles = 7
Two sign change above auxillary equation = 2 poles in RHS.
Two sign changes below auxillary equation implies out of 4 symmetric roots about origin, two poles are in LHS and two poles are in RHS.
Therefore 3 poles in LHS and 4 poles in RHS.
Q3: The range of K for which all the roots of the equation s3 + 3s2 + 2s + K = 0 are in the left half of the complex s-plane is (SET-2 (2017))
(a) 0 < K < 6
(b) 0 < K < 16
(c) 6 < K < 36
(d) 6 < K < 16
Ans: (a)
Sol: From the given equation, s3 + 3s2 + 2s + K = 0
Using Routh's criterion, we get
K < 6 and K > 0 or 0 < K < 6
Q4: A closed loop system has the characteristic equation given by s3 + Ks2 + (K + 2)s + 3 = 0. For this system to be stable, which one of the following conditions should be satisfied? (SET-1(2017))
(a) 0 < K < 0.5
(b) 0 < K < 1
(c) 0 < K < 1
(d) K > 1
Ans: (d)
Sol: Characteristic equation is,
s3 + Ks2 + (K + 2)s + 3 = 0
For this system to be stable, using Routh's criterion, we can write,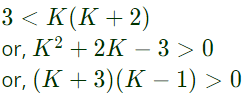 Here, the valid answer will be out of all the options given.
Here, the valid answer will be out of all the options given.
i.e K > 1.
Q5: The open loop transfer function of a unity feedback control system is given by The closed loop system will be stable if, (SET-2 (2016))
The closed loop system will be stable if, (SET-2 (2016))
(a) 
(b) 
(c) 
(d) 
Ans: (c)
Sol: Open loop transfer function: For closed loop system stability, characteristic equation is,
For closed loop system stability, characteristic equation is,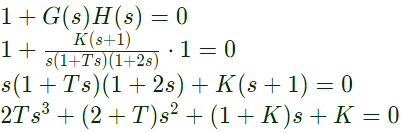 Using Routh's criteria,
Using Routh's criteria,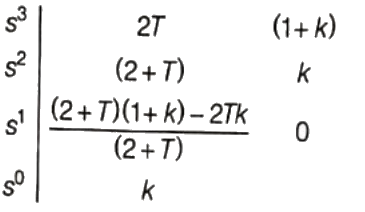
 Hence for stability,
Hence for stability, 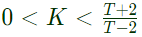
Q6: Given the following polynomial equation s3 + 5.5s2 + 8.5s + 3 = 0, the number of roots of the polynomial, which have real parts strictly less than -1, is ________ . (SET-1 (2016))
(a) 1
(b) 2
(c) 3
(d) 4
Ans: (b)
Sol: 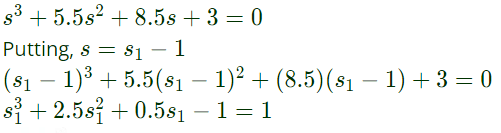
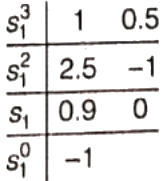 As there is one sign change, hence, two roots of given polynomial will lie to the left of s = −1.
As there is one sign change, hence, two roots of given polynomial will lie to the left of s = −1.
Q7: The transfer function of a second order real system with a perfectly flat magnitude response of unity has a pole at (2 - j3). List all the poles and zeroes. (SET-1 (2015))
(a) Poles at (2 ± j3), no zeroes.
(b) Poles at (±2 - j3), one zero at origin.
(c) Poles at (2 - j3), (-2 + j3), zeroes at (-2 - j3), (2 + j3).
(d) Poles at (2 ± j3), zeroes at (-2 ± j3).
Ans: (d)
Sol: Response of transfer function is unit for all ω.
M = 1; P1 = 2 − j3
Second order system, hence number of poles = 2
Therefore, second pole P2 = 2 + j3
Now for M = 1, and due to x-axis symmetry of root locus of transfer function, position of zeroes must be
Z1 = − 2 − j3 and Z2 = −2 + j3
Q8: A single-input single output feedback system has forward transfer function G(s) and feedback transfer function H(s). It is given that |G(s)H(s)| <1. Which of the following is true about the stability of the system ? (SET-3(2014))
(a) The system is always stable
(b) The system is stable if all zeros of G(s)H(s) are in left half of the s-plane
(c) The system is stable if all poles of G(s)H(s) are in left half of the s-plane
(d) It is not possible to say whether or not the system is stable from the information given
Ans: (a)
Q9: A system with the open loop transfer function is connected in a negative feedback configuration with a feedback gain of unity. For the closed loop system to be marginally stable, the value of K is ______ (SET-2(2014))
is connected in a negative feedback configuration with a feedback gain of unity. For the closed loop system to be marginally stable, the value of K is ______ (SET-2(2014))
(a) 4
(b) 5
(c) 6
(d) 7
Ans: (b)
Sol: Given, 
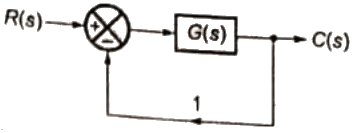 The characteristic equation of given unity-negative feedback control system is given by
The characteristic equation of given unity-negative feedback control system is given by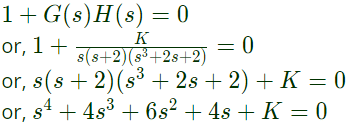 Forming Routh' array as shown below
Forming Routh' array as shown below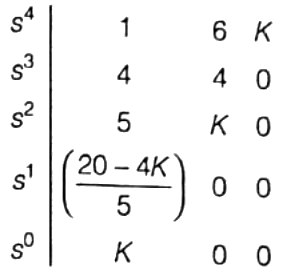 For stability of the system,
For stability of the system, 
∴ For stability, 0 < K < 5
For given system to be marginally stable
K = 5
Q10: For the given system, it is desired that the system be stable. The minimum value of α for this condition is ______. (SET-1(2014)) (a) 0.22
(a) 0.22
(b) 0.46
(c) 0.86
(d) 0.62
Ans: (d)
Sol: Given,  and H(s) = 1
and H(s) = 1
Characteristic equation of given control system is given by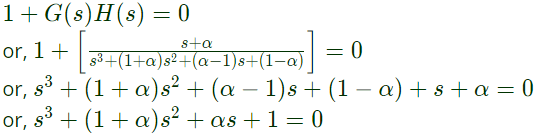 Routh's array is
Routh's array is For the given system to be stable, there should not be any sign change in the first column of Routh's array.
For the given system to be stable, there should not be any sign change in the first column of Routh's array.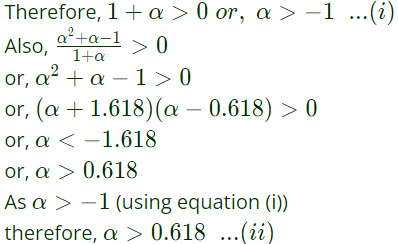 Combining condition (i) and (ii),
Combining condition (i) and (ii),
−1 < α < 0.618
Thus, for the system to be stable minimum value of α = 0.618.
Q11: In the formation of Routh-Hurwitz array for a polynomial, all the elements of a row have zero values. This premature termination of the array indicates the presence of (SET-1 (2014))
(a) only one root at the origin
(b) imaginary roots
(c) only positive real roots
(d) only negative real roots
Ans: (b)
Sol: When all the element s of a row in Routh-Hurwitz array ends abruptly. i.e all elements of that row have a zero values then, the system will be either unstable or maginally stable. Marginally stable means it will have imaginary roots (two equal and opposite complex roots on imaginary axis of s-plane).
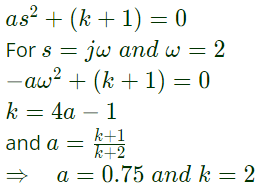
Q12: The feedback system shown below oscillates at 2 rad/s when (2012)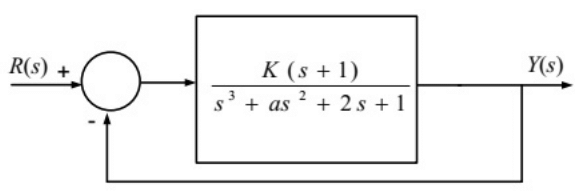 (a) K = 2 and a = 0.75
(a) K = 2 and a = 0.75
(b) K = 3 and a = 0.75
(c) K = 4 and a = 0.5
(d) K = 2 and a = 0.5
Ans: (a)
Sol: The characteristic equation,
1 + G(s)H(s) = 0
⇒ s3 + as2 + (k + 2)s + (k + 1) = 0
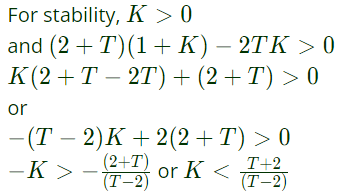
Routh array of above equation,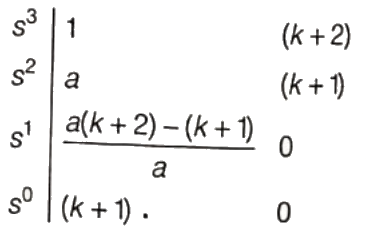
Q13: An open loop system represented by the transfer function 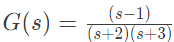 is (2011)
is (2011)
(a) Stable and of the minimum phase type
(b) Stable and of the non-minimum phase type
(c) Unstable and of the minimum phase type
(d) Unstable and of non-minimum phase type
Ans: (b)
Sol: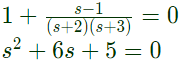
 There is no root in RHS of s-plane.
There is no root in RHS of s-plane.
Q14: The first two rows of Routh's tabulation of a third order equation are as follows.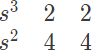 This means there are (2009)
This means there are (2009)
(a) Two roots at s = ±j and one root in right half s-plane
(b) Two roots at s = ±j2 and one root in left half s-plane
(c) Two roots at s = ±j2 and one root in right half s-plane
(d) Two roots at s = ±j and one root in left half s-plane
Ans: (d)
Sol: Routh-Array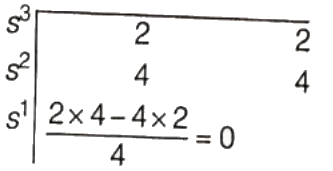 The third row vanishes.
The third row vanishes.
An auxillary equation is formed using elements pf 2nd row.
Auxiliary equation A(s) = 4s2 + 4 = 0 ⇒ s = ±j.
The derivative of this auxiliary equation is taken w.r.t. s and the cofficient of the differntiated equation are taken as the elements of 3rd row.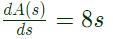 Routh-Array
Routh-Array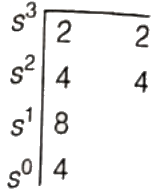 There is no root in RHS of s-plane.
There is no root in RHS of s-plane.
Two roots of s = ±j, so one root is in LHS of s-plane.
Q15: Figure shows a feedback system where K > 0 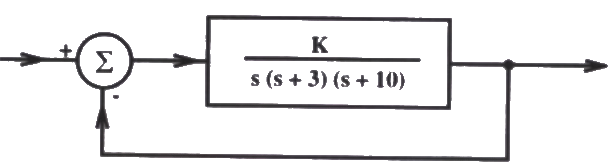 The range of K for which the system is stable will be given by (2008)
The range of K for which the system is stable will be given by (2008)
(a) 0 < K < 30
(b) 0 < K < 39
(c) 0 < K < 390
(d) K > 390
Ans: (c)
Sol: 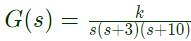 and H(s) = 1
and H(s) = 1
Characteristic equation, 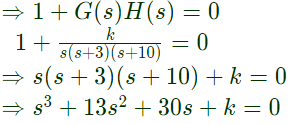 Routh-Array
Routh-Array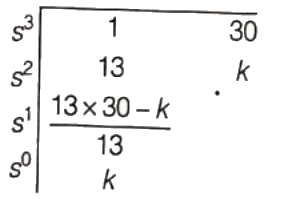 According to Routh-Hurwitz criterian.
According to Routh-Hurwitz criterian.
For stable system, signs of first column do not change Therefore system to be stable 0 < k < 390.
Therefore system to be stable 0 < k < 390.
Q16: If the loop gain K of a negative feed back system having a loop transfer function  is to be adjusted to induce a sustained oscillation then (2007)
is to be adjusted to induce a sustained oscillation then (2007)
(a) The frequency of this oscillation must be 4/√3 rad/s
(b) The frequency of this oscillation must be 4 rad/s
(c) The frequency of this oscillation must be 4 or 4/√3 rad/s
(d) Such a K does not exist
Ans: (b)
Sol: Open loop transfer function, ∴ Characteristic equation,
∴ Characteristic equation,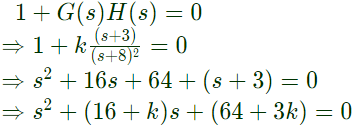 Routh-Array,
Routh-Array,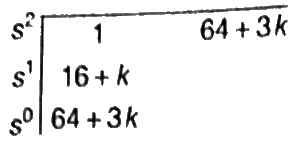 For sustained oscillation,
For sustained oscillation,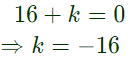 Auxillary equation,
Auxillary equation,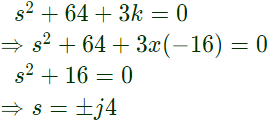 So, frequency of oscillation in 4 rad/sec.
So, frequency of oscillation in 4 rad/sec.
Q17: The system shown in the figure is (2007)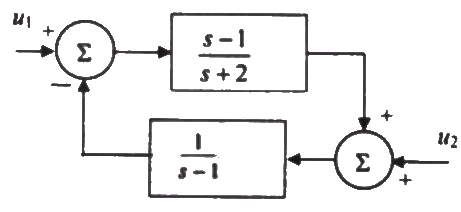 (a) Stable
(a) Stable
(b) Unstable
(c) Conditionally stable
(d) Stable for input u1, but unstable for input u2
Ans: (d)
Sol: 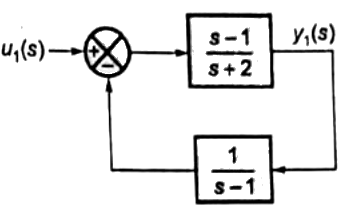
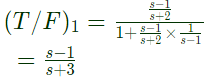 Pole is in LHS of s-plane, hence stable.
Pole is in LHS of s-plane, hence stable.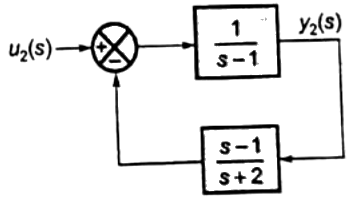
 Hence, unstable as it ha pole at right hand side of s-plane.
Hence, unstable as it ha pole at right hand side of s-plane.
Q18: The algebraic equation
F(s) = s5 − 3s4 + 5s3 − 7s2 + 4s + 20 is given. F(s) = 0 has (2006)
(a) a single complex root with the remaining roots being real
(b) one positive real root and four complex roots, all with positive real parts
(c) one negative real root, two imaginary roots, and two roots with positive real parts
(d) one positive real root, two imaginary roots, and two roots with negative real parts
Ans: (c)
Q19: A unity feedback system, having an open loop gain  becomes stable when (2005)
becomes stable when (2005)
(a) ∣K∣ > 1
(b) K > 1
(c) ∣K∣ < 1
(d) K < −1
Ans: (c)
Sol: Characteristic equation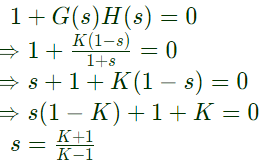 For a stable system pole lies in left hand side of s-plane, it means, must be negative for stable system.
For a stable system pole lies in left hand side of s-plane, it means, must be negative for stable system. CASE-I:
CASE-I:
K + 1 < 0 and K − 1 > 0
K < −1 and K > 1
which is not possible
CASE-II:
K + 1 > 0 and K − 1 < 0
K > −1 and K < 1
−1 < K < 1
∣K∣ < 1
Q20: For the equation, s3 − 4s2 + s + 6 = 0 the number of roots in the left half of s-plane will be (2004)
(a) zero
(b) one
(c) two
(d) three
Ans: (b)
Sol: s3 − 4s2 + s + 6 = 0
The routh-array is formed as follow: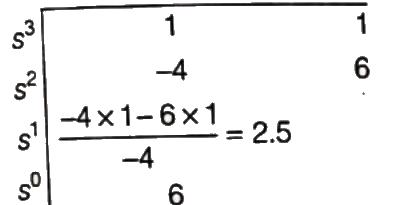
Number of sign changes in forst column of Routh array = 2
According to Routh-Hurwitz criterion, the number of changes of sign in the first column gives the number of positive real part roots of the polynomial.
So, number of roots in RHS of s-plane = 2
Total number of roots = 3
Hence, no of roots in LHS of s-plane = 3 - 2 = 1
Q21: The loop gain GH of a closed loop system is given by the following expression The value of K for which the system just becomes unstable is (2003)
The value of K for which the system just becomes unstable is (2003)
(a) K = 6
(b) K = 8
(c) K = 48
(d) K = 96
Ans: (c)
Sol: Characteristic equation = 1 + GH = 0 Characteristic equation,
Characteristic equation,
⇒ s2 + 6s2 + 8s + K = 0
The Routh-array is formed as follows:
According to Routh-Hurwitz criterion, for a stable system there should be no charge of sign in the first column of routh array.
So, 
Hence for K = 48, the system just becomes unstable.
Q22: The roots of the closed loop characteristic equation of the system shown in figure are (2003)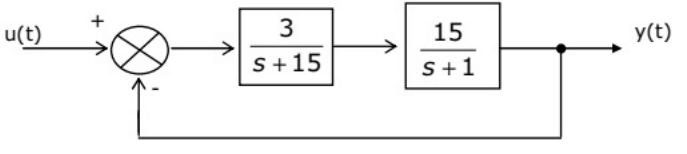 (a) -1 and -15
(a) -1 and -15
(b) 6 and 10
(c) -4 and -15
(d) -6 and -10
Ans: (d)
Sol: 1 + GH = 0 (characteristic equation),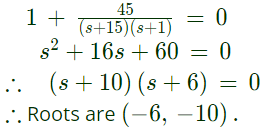
|
53 videos|107 docs|40 tests
|
FAQs on Previous Year Questions- Concepts of Stability - Control Systems - Electrical Engineering (EE)
| 1. What is the concept of stability in the context of engineering? |  |
| 2. How is stability different from robustness in engineering? | |
| 3. What are the factors that affect the stability of a system? | |
| 4. How can engineers analyze the stability of a system? | |
| 5. Why is stability analysis important in the design and development of engineering systems? | |



study material
,Sample Paper
,Objective type Questions
,mock tests for examination
,shortcuts and tricks
,Summary
,Extra Questions
,Free
,Semester Notes
,video lectures
,Previous Year Questions- Concepts of Stability | Control Systems - Electrical Engineering (EE)
,past year papers
,Important questions
,Previous Year Questions- Concepts of Stability | Control Systems - Electrical Engineering (EE)
,Exam
,practice quizzes
,Previous Year Questions- Concepts of Stability | Control Systems - Electrical Engineering (EE)
,ppt
,Previous Year Questions with Solutions
,Viva Questions
,MCQs
;


Previous Year Questions- Concepts of Stability Free PDF Download
Importance of Previous Year Questions- Concepts of Stability
Previous Year Questions- Concepts of Stability Notes
Previous Year Questions- Concepts of Stability Electrical Engineering (EE)
Study Previous Year Questions- Concepts of Stability on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!