Rational System Functions | Signals and Systems - Electrical Engineering (EE) PDF Download

Introduction
In theory one can find the Inverse Laplace and the Inverse z - Transform using the integral formula given previously but this procedure will generally involve integration of complex functions which may become very difficult at times so we normally find the inverse transform using our 'experience' or observation. That is, we try to split the given function (whose transform we have to calculate) into those functions whose Inverse Transform we know beforehand; just as we do while integrating a function of real variables.
We will proceed in a step by step manner towards our goal of finding the Inverse Laplace and z - Transform of a given function We shall focus in depth on the class of those systems only which have a rational system function. Let us first define what a rational system function is.
Rational System Function and Rational System
Recall that the system function of a continuous variable (respectively discrete variable) system is the Laplace Transform (respectively z -Transform) of the impulse response of the system.

A rational system function is a system function which is a rational function, i.e. a rational system function corresponding to a system can be expressed as a ratio of two polynomials in s ( respectively z ).
A continuous variable (respectively discrete variable) LSI system with rational system function H(s) (respectively H(z) ) is called a RATIONAL SYSTEM.
Rational systems are the most studied and used. Also, these are the best known realizable systems (whether in continuous or discrete variable), that is, various techniques have been developed to implement rational systems in practical situations, but this is not the case with other systems, i.e. those which don't have a rational system function. This is the main reason why we focus on systems having rational system functions only.
Now we proceed to define the terms 'poles' and 'zeroes' of a rational system function.
Poles and Zeros of a Rational System Function
If we think of H(s) as

the solutions of N(s) = 0 are called the zeroes of H(s) ,and the solutions of D(s) = 0 are called the poles of H(s).
Example:
Over here, s = 2 is called the pole of H(s).
(If we plot |H(s)| 3 -dimensionally, that is, if we consider the plane formed by the x-axis and the y-axis to be the s-plane and plot |H(s)| along the z- axis, then the plot of |H(s)| can be thought of as a tent on the plane of s, held by an infinite pole at s = 2, since at s = 2, |H(s)| tends to infinity, hence the term 'pole' .
Quite obviously, the solutions of N(s) = 0 make H(s) also equal to zero. Hence the term 'zero'.
Now we show one of the important properties of the Transforms, namely differentiation of Laplace and z - Transform with respect to s and z respectively.This property comes in very useful while calculating the inverse Laplace and inverse z - Transform of a given function.
Differentiation of Laplace Transform
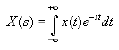
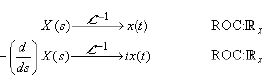
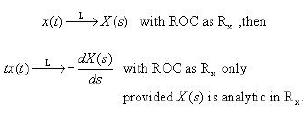
Taking the continuous variable case first; as we know, the Laplace Transform of x(t) is given by
On differentiating both sides wrt s and multiplying both sides by -1 , we get
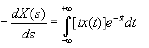
provided it exists. This can be thought of as taking the Laplace Transform of tx(t).
Hence we observe that, if
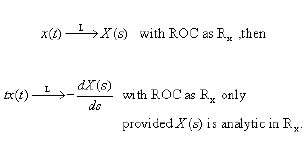
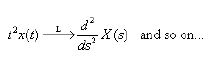
Similarly we have
Differentiation of z - Transform
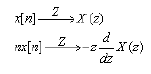
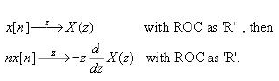
Now for the discrete variable case, the z - Transform of x[n] is given by
On differentiating both sides w.r.t z and then multiplying both sides by -z, we get
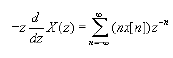
provided it exists. This can be thought of as taking the z Transform of nx[n].
Hence we observe that, if
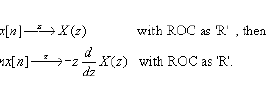
Similarly we can proceed further, by differentiating again and again.
Example:
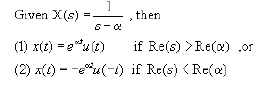
In the first case x(t) is a right sided signal, and the Region of Convergence lies to the right side of a vertical line in the s - plane and in the second case, x(t) is a left sided signal and the Region of Convergence lies to the left side of a vertical line in the s - plane.
As a general rule, we can say that for a right sided continuous variable signal, the ROC will be on the right side of a vertical line in the s plane and similarly on the left side of a vertical line in the s plane for a left sided continuous variable signal.
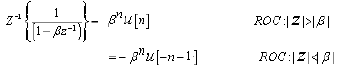
In the first case, x[n] is a right sided signal and the Region of Convergence is the region in the z plane outside a circle and extending upto infinity. In the second case, x[n] is a left sided signal and the Region of Convergence is the region lying inside a circle and including z = 0.
As a general rule, we can say that for a right sided discrete variable signal, the ROC will be to the exterior of some circle in the z plane and for a left sided discrete variable signal, it will be to the interior of some circle in the z plane.
The above example will be very useful while finding the inverse transform ( Laplace or z ) of a given rational function.
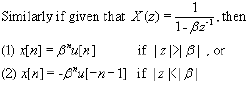
Z-Transform : Simple Pole case with no Zeros
Example:
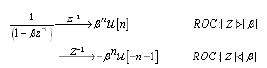
Using the property derived above by differentiation of z transform, we get
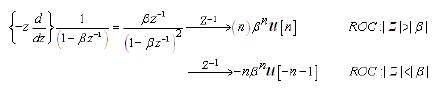
Hence , we get
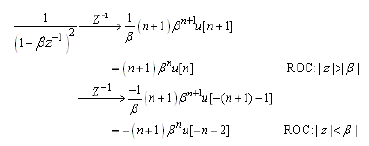
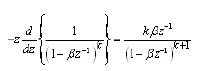
Now we proceed on solving inverse Laplace and Z - transforms with multiple poles, after looking at simple pole cases of Laplace and z transform. We shall make use of the differentiation properties of Laplace and z transform extensively for solving multiple pole cases. We start by deriving the following relations.
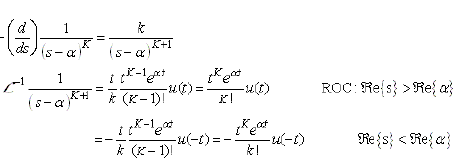
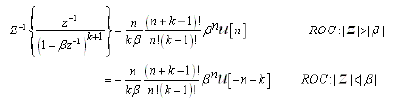
Inverse Laplace transform : multiple poles, no zeros
Problem:
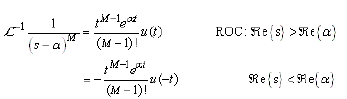
Derive and prove using induction :-
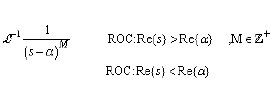
Solution
Proof:
( By Mathematical Induction )
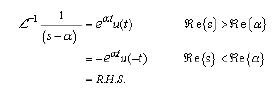
Part i) Consider M=1
Part ii) Consider that the above result holds true for M = K;
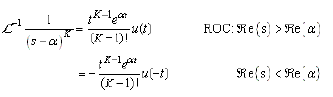
To prove that it holds for M = K+1
We know the property that.
Thus, the result holds true for M = K+1.
Hence, by principle of Mathematical Induction the above result holds true.
We can now use the above relation for finding inverse Laplace tranforms of various rational functions.
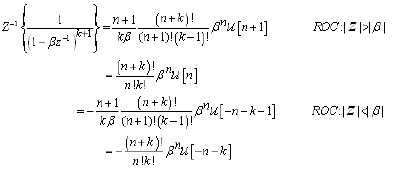
Problem:
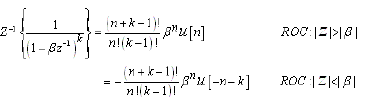
Derive and prove using Induction.
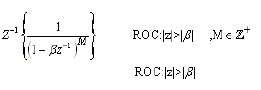
Solution:
Proof ( By Mathematical Induction )
Proof ( By Mathematical Induction )
Part i) Consider M =1
Part ii) Consider that the above result holds true for M = k;
To prove that it holds for M = k+1: We know the property that,
Now,
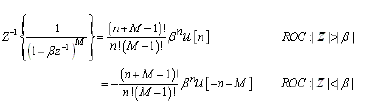
Taking z - inverse on both the sides, and using the above stated property we get
Substituting n=n+1 we get,
(at n= -1 , n+1 =0)
Thus, the result holds true for M = k+1. Hence, by principle of Mathematical Induction the above result holds true.
We can now use the above relation for finding inverse z transforms of various rational functions.
Conclusion:
In this lecture you have learnt:
A rational system function is a system function which can be expressed as a ratio of two polynomials in s ( respectively z ) A continuous variable (respectively discrete variable) LSI system with rational system function H(s) (respectively H(z) ) is called a RATIONAL SYSTEM.
- If we think of H(s) as

the solutions of N(s) = 0 are called the zeroes of H(s) ,and the solutions of D(s) = 0 are called the poles of H(s).
|
41 videos|70 docs|33 tests
|
FAQs on Rational System Functions - Signals and Systems - Electrical Engineering (EE)
| 1. What is a rational system function? |  |
| 2. How are rational system functions different from other functions? | |
| 3. How can rational system functions be used in practical applications? | |
| 4. What is the significance of poles and zeros in rational system functions? | |
| 5. How can one determine the stability of a system using rational system functions? | |



Previous Year Questions with Solutions
,Sample Paper
,Viva Questions
,past year papers
,Summary
,practice quizzes
,ppt
,Free
,study material
,shortcuts and tricks
,Rational System Functions | Signals and Systems - Electrical Engineering (EE)
,Exam
,Rational System Functions | Signals and Systems - Electrical Engineering (EE)
,mock tests for examination
,Extra Questions
,Important questions
,Semester Notes
,Rational System Functions | Signals and Systems - Electrical Engineering (EE)
,MCQs
,video lectures
,Objective type Questions
;






Rational System Functions Free PDF Download
Importance of Rational System Functions
Rational System Functions Notes
Rational System Functions Electrical Engineering (EE) Questions
Study Rational System Functions on the App
|
© EduRev
|
Education Revolution
|



|





