Rigid Body Dynamics - Collisions, Classical Mechanics, CSIR-NET Physical Sciences | Physics for IIT JAM, UGC - NET, CSIR NET PDF Download

The Lagrangian
In the inertial space frame we found the kinetic energy of a rotating rigid body to be

M is the mass of the system and I is the inertia tensor.
The inertia tensor is a 3 × 3 matrix. Its eigenvectors are special directions within the rigid body called the principal axes. The eigenvalues of the tensor, I1 , I2 and I3 , are called the principal moments of inertia.
The Lagrangian is

where V is the external potential within which the body moves.
The angular momentum
The angular momentum L is the generalized momentum conjugate to the angular coordinates. As usual, we can write

In general the angular momentum is not parallel to the axis of rotation of the body.
Since I defines three independent principal axes,  , one can decompose any vector into a linear sum of components alone each of these axes. So, using the decomposition
, one can decompose any vector into a linear sum of components alone each of these axes. So, using the decomposition  , we find that
, we find that
In the special case when two of the ωi vanish, i.e., the angular velocity is initially in the direction of one of the principal axes, then L is parallel to the ω.
The equations of motion
In the inertial space frame, the Lagrangian is given by

So the equations of motion reduce to one set of equations for the rate of change of  and another for the rate of change of ω. We have earlier discussed why θi do not form the components of a vector, but
and another for the rate of change of ω. We have earlier discussed why θi do not form the components of a vector, but 

where the gradient contains partial derivatives with respect to the components of R. In the absence of external forces, F = 0. The remaining three equations of motion are

where M is the external torque acting on the body.
The external torque
Representing a rigid body by N particles fixed to each other,
Here the x are taken in an inertial frame. Then,
where f i is the force on the i -th body. The forces of constraint satisfy f ij = −f ji . If there were only forces due to constraints, then

As a result, this would be zero. Therefore, the net torque on the body is due to external forces only. When F = 0, the torque is called a couple.
Precession and spin
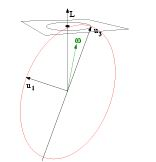
For a symmetric top, I1 = I2 = I3 , the axis of symmetry is the principal axis  . The direction of L and ω do not coincide in general. Since all directions perpendicular to are equivalent, we can choose the
. The direction of L and ω do not coincide in general. Since all directions perpendicular to are equivalent, we can choose the  directions at some time t so that L and ω are in the 13-plane. Then, since
directions at some time t so that L and ω are in the 13-plane. Then, since  Since v = ω × x, the velocity at any point in the axis is in the
Since v = ω × x, the velocity at any point in the axis is in the  direction.
direction.
This is independent of t . So, the axis rotates around the fixed vector L; this is called precession. The top also rotates around ; this is called spin. If  , then the spin velocity is ω3 = L3/I3 = L cos θ/I3. The precession velocity is the component of ω1 parallel to L, so ωp = ω1 / sin θ = M /I1.
, then the spin velocity is ω3 = L3/I3 = L cos θ/I3. The precession velocity is the component of ω1 parallel to L, so ωp = ω1 / sin θ = M /I1.
Euler angles
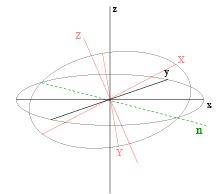
Take the xyz axes to be the inertial space frame. Orient the body frame XYZ along the principal axes. If the spin velocity around ,
, 

Angular velocity
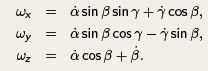
Problem 55: Angular velocity in Euler angles
Check that the angular velocity in the space frame, ω, is related to the rate of change of the Euler angles by
Construct the rotational term in the kinetic energy using these expressions. Specialize to the cases of the spherical top and the rigid rotator and check that the correct description of free rotations is obtained in both these cases.
Simple problems
Problem 56: Precession in Euler angles For a symmetric top with I1 = I2 = I3, with the symmetry axis along , choose one of the principal axes along  . Show that
. Show that

Describe free rotations and find the precession and spin angular velocities.
Problem 57: Symmetric top with a couple Take a symmetric top with I1 = I2 = I3 subject to the potential V = M cos γ . Write the Lagrangian for this problem and find the conserved quantities and the cyclic coordinates. Using these, reduce the problem to one-dimension. Describe the general character of the motion, including nutations.
A trivial special case
In the special case when F and M are orthogonal, one can find a spatial vector a such that
M = a × F.
Now, for any vector a(λ) = a + λF, the above equation is also satisfied. Additionally, if one shifts the origin of coordinates to x' = x − a, then the torque becomes M' = M − a × F = 0. So, for any of these choices of coordinate systems, the external torque vanishes if in another system the force and torque are orthogonal.
Problem 58: A linear equation Given vectors F and M, one can find a vector a such that M = a × F, because these are three equations in 3 unknowns.
Examine the linear equations in the components of a and find what is special about them when F and M are orthogonal.
The trivial case is realistic
When the force field is uniform, one can write each of the  the torque is
the torque is

In the case where the forces are purely gravitational, X = R, and the torque about the center of mass vanishes, as it does along any line in the direction of the force along the center of mass.
This is relevant to the problem discussed on September 12, and given in the mid-sem. For a satellite moving in an orbit far larger than the radius of the earth, the tidal forces may be neglected if the satellite is small. In this case the gravitational force on the satellite is exactly as above, and the motion can be analyzed as if there were no torque.
Euler equations
The simplest description of a rotating body is found in the body frame with axial directions chosen along the principal axes of the body. Clearly, for any vector
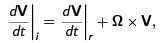
where the subscript i refers to the change in the inertial system and r to the change in a system rotating with angular velocity Ω.
Using this we get Euler’s equations for rigid bodies in the body frame

Problem 59: Euler equations for free rotations
Solve Euler’s equations for free rotations of a body, i.e., for M = 0.
Check that these solutions are the same as the solutions obtained earlier for free rotations, but viewed from a non-inertial frame.
Keywords
Keywords angular momentum, principal axes, space frame, torque, couple, free rotations, spherical top, rotator, symmetric top, precession, spin, Euler angles, line of nodes, nutations, Euler’s equations
FAQs on Rigid Body Dynamics - Collisions, Classical Mechanics, CSIR-NET Physical Sciences - Physics for IIT JAM, UGC - NET, CSIR NET
| 1. What is rigid body dynamics? |  |
| 2. What are collisions in rigid body dynamics? | |
| 3. How is classical mechanics related to rigid body dynamics? | |
| 4. What is CSIR-NET Physical Sciences Physics exam? | |
| 5. What are some important topics to study for CSIR-NET Physical Sciences Physics exam related to rigid body dynamics? | |



Semester Notes
,Free
,past year papers
,Rigid Body Dynamics - Collisions
,CSIR NET
,MCQs
,Viva Questions
,CSIR NET
,Exam
,Rigid Body Dynamics - Collisions
,Rigid Body Dynamics - Collisions
,Previous Year Questions with Solutions
,UGC - NET
,study material
,Classical Mechanics
,Summary
,CSIR-NET Physical Sciences | Physics for IIT JAM
,Important questions
,Objective type Questions
,CSIR-NET Physical Sciences | Physics for IIT JAM
,CSIR-NET Physical Sciences | Physics for IIT JAM
,Classical Mechanics
,UGC - NET
,CSIR NET
,UGC - NET
,practice quizzes
,Extra Questions
,shortcuts and tricks
,video lectures
,Classical Mechanics
,Sample Paper
,mock tests for examination
,ppt
;


Rigid Body Dynamics - Collisions, Classical Mechanics, CSIR-NET Physical Sciences Free PDF Download
Importance of Rigid Body Dynamics - Collisions, Classical Mechanics, CSIR-NET Physical Sciences
Rigid Body Dynamics - Collisions, Classical Mechanics, CSIR-NET Physical Sciences Notes
Rigid Body Dynamics - Collisions, Classical Mechanics, CSIR-NET Physical Sciences Physics Questions
Study Rigid Body Dynamics - Collisions, Classical Mechanics, CSIR-NET Physical Sciences on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!