Scalars & Vectors | Engineering Mechanics - Civil Engineering (CE) PDF Download

Scalars & Vectors
We use two kinds of quantities in mechanics—scalars and vectors. Scalar quantities are those with which only a magnitude is associated. Examples of scalar quantities are time, volume, density, speed, energy, and mass. Vector quantities, on the other hand, possess direction as well as magnitude, and must obey the parallelogram law of addition as described later in this article. Examples of vector quantities are displacement, velocity, acceleration, force, moment, and momentum. Speed is a scalar. It is the magnitude of velocity, which is a vector. Thus velocity is specified by a direction as well as a speed.
Vectors representing physical quantities can be classified as free, sliding, or fixed.
A free vector is one whose action is not confined to or associated with a unique line in space. For example, if a body moves without rotation, then the movement or displacement of any point in the body may be taken as a vector. This vector describes equally well the direction and magnitude of the displacement of every point in the body. Thus, we may represent the displacement of such a body by a free vector.
A sliding vector has a unique line of action in space but not a unique point of application. For example, when an external force acts on a rigid body, the force can be applied at any point along its line of action without changing its effect on the body as a whole,* and thus it is a sliding vector.
A fixed vector is one for which a unique point of application is specified. The action of a force on a deformable or nonrigid body must be specified by a fixed vector at the point of application of the force. In this instance the forces and deformations within the body depend on the point of application of the force, as well as on its magnitude and line of action.
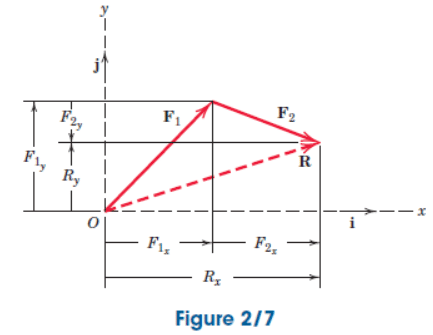
Rectangular components are convenient for finding the sum or resultant R of two forces which are concurrent. Consider two forces F1 and F2 which are originally concurrent at a point O. Figure 2/7 shows the line of action of F2 shifted from O to the tip of F1 according to the triangle rule of Fig. 2/3. In adding the force vectors F1 and F2, we may write

or

from which we conclude that
 (2/4)
(2/4)
The term ΣFx means “the algebraic sum of the x scalar components”.For the example shown in Fig. 2/7, note that the scalar component F2y would be negative.
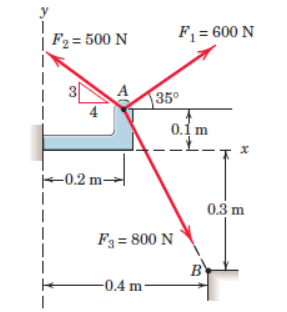
Sample Problem 2/1
The forces F1, F2, and F3, all of which act on point A of the bracket, are specified in three different ways. Determine the x and y scalar components of each of the three forces.
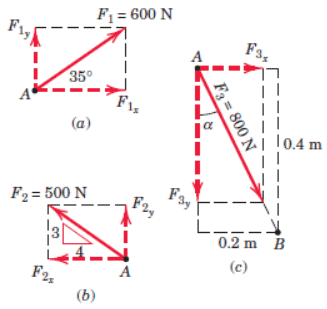
Solution. The scalar components of F1, from Fig. a, are
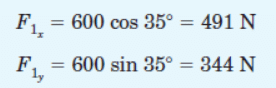 Ans
Ans
The scalar components of F2, from Fig. b, are
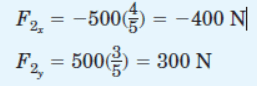 Ans
Ans
Note that the angle which orients F2 to the x-axis is never calculated. The cosine and sine of the angle are available by inspection of the 3-4-5 triangle. Also note
that the x scalar component of F2 is negative by inspection.
The scalar components of F3 can be obtained by first computing the angle α of Fig. c.
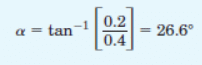
Then,
 Ans
Ans
Alternatively, the scalar components of F3 can be obtained by writing F3 as a magnitude times a unit vector nAB in the direction of the line segment AB.
Thus,
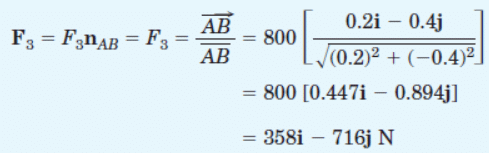
The required scalar components are then
 Ans.
Ans.
which agree with our previous results.
Sample Problem 2/2
Combine the two forces P and T, which act on the fixed structure at B, into a single equivalent force R.
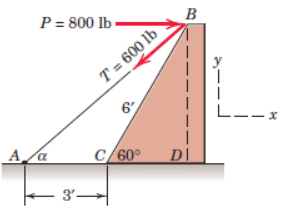
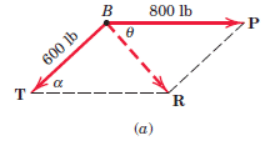
Graphical solution. The parallelogram for the vector addition of forces T and P is constructed as shown in Fig. a. The scale used here is 1 in. =800 lb; a scale of 1 in. = 200 lb would be more suitable for regular-size paper and would give greater accuracy. Note that the angle a must be determined prior to construction of the parallelogram. From the given figure

Measurement of the length R and direction θ of the resultant force R yields the approximate results
R = 525 lb θ = 49o Ans.
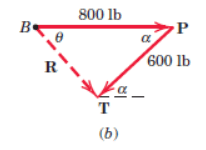
Geometric solution. The triangle for the vector addition of T and P is shown in Fig. b. The angle α is calculated as above. The law of cosines gives
R2 = (600)2 + (800)2 - 2(600)(800) cos 40.9o= 274,300
R = 524 lb Ans.
From the law of sines, we may determine the angle θ which orients R. Thus,
 Ans
Ans
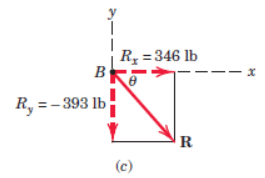
Algebraic solution. By using the x-y coordinate system on the given figure, we may write
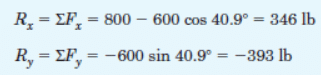
The magnitude and direction of the resultant force R as shown in Fig. c are then
 Ans.
Ans.
The resultant R may also be written in vector notation as
R = Rxi + Ryj = 346i - 393j lb Ans.
Sample Problem 2/3
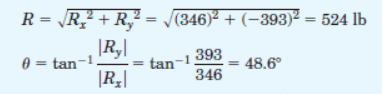
The 500-N force F is applied to the vertical pole as shown. (1) Write F in terms of the unit vectors i and j and identify both its vector and scalar components. (2) Determine the scalar components of the force vector F along the x'- and y'-axes. (3) Determine the scalar components of F along the x- and y'-axes.

Solution. Part (1). From Fig. α we may write F as
F =(F cosθ)i - (F sin θ)j
= (500 cos 60o)i - (500 sin 60o)j
= (250i - 433j) N Ans.
The scalar components are Fx = 250 N and Fy = -433 N. The vector components are Fx = 250i N and Fy=-433j N.
art (2). From Fig. b we may write F as F = 500i' N, so that the required scalar components are
Fx'= 500 N Fy'= 0
Part (3). The components of F in the x- and y'-directions are nonrectangular and are obtained by completing the parallelogram as shown in Fig. c. The magnitudes of the components may be calculated by the law of sines. Thus,
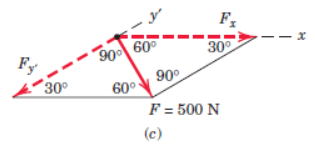
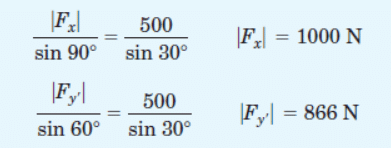
The required scalar components are then
Fx = 1000 N Fy'=-866 N Ans.
|
23 videos|61 docs|53 tests
|
FAQs on Scalars & Vectors - Engineering Mechanics - Civil Engineering (CE)
| 1. What is the difference between scalars and vectors in civil engineering? |  |
| 2. How are scalars and vectors used in structural analysis in civil engineering? | |
| 3. Can you provide an example of a scalar quantity commonly encountered in civil engineering? | |
| 4. What are some examples of vector quantities in civil engineering? | |
| 5. How are scalars and vectors used in surveying and geotechnical engineering? | |




Objective type Questions
,Free
,Summary
,Semester Notes
,Previous Year Questions with Solutions
,video lectures
,practice quizzes
,Viva Questions
,Scalars & Vectors | Engineering Mechanics - Civil Engineering (CE)
,Exam
,Scalars & Vectors | Engineering Mechanics - Civil Engineering (CE)
,Important questions
,past year papers
,study material
,ppt
,shortcuts and tricks
,Scalars & Vectors | Engineering Mechanics - Civil Engineering (CE)
,Sample Paper
,Extra Questions
,mock tests for examination
,MCQs
;


Scalars & Vectors Free PDF Download
Importance of Scalars & Vectors
Scalars & Vectors Notes
Scalars & Vectors Civil Engineering (CE) Questions
Study Scalars & Vectors on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!