
Best Study Material for Mathematics Exam
Mathematics Exam > Mathematics Notes > Mathematics for IIT JAM, GATE, CSIR NET, UGC NET > Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths
Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET PDF Download
It is quite hard to solve non-linear systems of equations, while linear systems are quite easy to study. There are numerical techniques which help to approximate nonlinear systems with linear ones in the hope that the solutions of the linear systems are close enough to the solutions of the nonlinear systems. We will not discuss this here. Instead, we will focus our attention on linear systems.
For the sake of simplicity, we will restrict ourselves to three, at most four, unknowns. The reader interested in the case of more unknowns may easily extend the following ideas.
Definition. The equation a x + b y + c z + d w = h where a, b, c, d, and h are known numbers, while x, y, z, and w are unknown numbers, is called a linear equation. If h =0, the linear equation is said to be homogeneous. A linear system is a set of linear equations and a homogeneous linear system is a set of homogeneous linear equations.
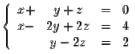
For example,
and
are linear systems, while
is a nonlinear system (because of y2). The system is an homogeneous linear system.
Matrix Representation of a Linear System
Matrices are helpful in rewriting a linear system in a very simple form. The algebraic properties of matrices may then be used to solve systems. First, consider the linear system
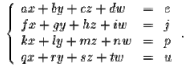
Set the matrices
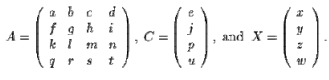
Using matrix multiplications, we can rewrite the linear system above as the matrix equation

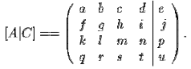
As you can see this is far nicer than the equations. But sometimes it is worth to solve the system directly without going through the matrix form. The matrix A is called the matrix coefficient of the linear system. The matrix C is called the nonhomogeneous term. When  the linear system is homogeneous. The matrix X is the unknown matrix. Its entries are the unknowns of the linear system. The augmented matrix associated with the system is the matrix [A|C], where
the linear system is homogeneous. The matrix X is the unknown matrix. Its entries are the unknowns of the linear system. The augmented matrix associated with the system is the matrix [A|C], where
In general if the linear system has n equations with m unknowns, then the matrix coefficient will be a nxm matrix and the augmented matrix an nx(m+1) matrix. Now we turn our attention to the solutions of a system.
Definition. Two linear systems with n unknowns are said to be equivalent if and only if they have the same set of solutions.
This definition is important since the idea behind solving a system is to find an equivalent system which is easy to solve. You may wonder how we will come up with such system? Easy, we do that through elementary operations. Indeed, it is clear that if we interchange two equations, the new system is still equivalent to the old one. If we multiply an equation with a nonzero number, we obtain a new system still equivalent to old one. And finally replacing one equation with the sum of two equations, we again obtain an equivalent system. These operations are called elementary operations on systems. Let us see how it works in a particular case.
Example. Consider the linear system
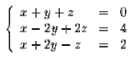
The idea is to keep the first equation and work on the last two. In doing that, we will try to kill one of the unknowns and solve for the other two. For example, if we keep the first and second equation, and subtract the first one from the last one, we get the equivalent system
Next we keep the first and the last equation, and we subtract the first from the second. We get the equivalent system
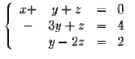
Now we focus on the second and the third equation. We repeat the same procedure. Try to kill one of the two unknowns (y or z). Indeed, we keep the first and second equation, and we add the second to the third after multiplying it by 3. We get
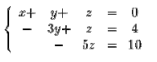
This obviously implies z = -2. From the second equation, we get y = -2, and finally from the first equation we get x = 4. Therefore the linear system has one solution
x = 4, y = -2, z = -2.
Going from the last equation to the first while solving for the unknowns is called backsolving.
Keep in mind that linear systems for which the matrix coefficient is upper-triangular are easy to solve. This is particularly true, if the matrix is in echelon form. So the trick is to perform elementary operations to transform the initial linear system into another one for which the coefficient matrix is in echelon form.
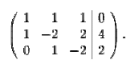
Using our knowledge about matrices, is there anyway we can rewrite what we did above in matrix form which will make our notation (or representation) easier? Indeed, consider the augmented matrix
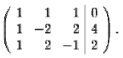
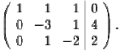
Let us perform some elementary row operations on this matrix. Indeed, if we keep the first and second row, and subtract the first one from the last one we get
Next we keep the first and the last rows, and we subtract the first from the second. We get
Then we keep the first and second row, and we add the second to the third after multiplying it by 3 to get
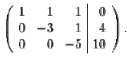
This is a triangular matrix which is not in echelon form. The linear system for which this matrix is an augmented one is
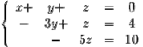
As you can see we obtained the same system as before. In fact, we followed the same elementary operations performed above.
In every step the new matrix was exactly the augmented matrix associated to the new system. This shows that instead of writing the systems over and over again, it is easy to play around with the elementary row operations and once we obtain a triangular matrix, write the associated linear system and then solve it. This is known as Gaussian Elimination. Let us summarize the procedure:
Gaussian Elimination. Consider a linear system.
1. Construct the augmented matrix for the system;
2. Use elementary row operations to transform the augmented matrix into a triangular one;
3. Write down the new linear system for which the triangular matrix is the associated augmented matrix;
4. Solve the new system. You may need to assign some parametric values to some unknowns, and then apply the method of back substitution to solve the new system.
Example. Solve the following system via Gaussian elimination
The augmented matrix is
We use elementary row operations to transform this matrix into a triangular one. We keep the first row and use it to produce all zeros elsewhere in the first column. We have
Next we keep the first and second row and try to have zeros in the second column. We get
This is a triangular matrix. Its associated system is
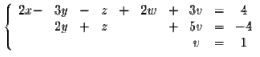
Clearly we have v = 1. Set z=s and w=t, then we have
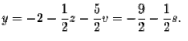
The first equation implies
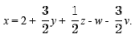
Using algebraic manipulations, we get

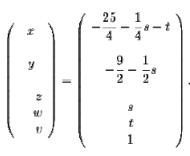
Putting all the stuff together, we have
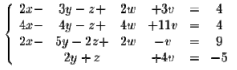
Example. Use Gaussian elimination to solve the linear system
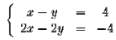
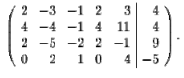
The associated augmented matrix is
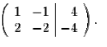
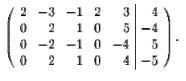
We keep the first row and subtract the first row multiplied by 2 from the second row. We get
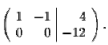
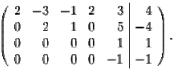
This is a triangular matrix. The associated system is
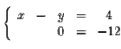
Clearly the second equation implies that this system has no solution. Therefore this linear system has no solution.
Definition. A linear system is called inconsistent or overdetermined if it does not have a solution. In other words, the set of solutions is empty. Otherwise the linear system is called consistent.
Following the example above, we see that if we perform elementary row operations on the augmented matrix of the system and get a matrix with one of its rows equal to (0,0, .. ,0, c), where c ≠ 0, then the system is inconsistent.
The document Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET is a part of the Mathematics Course Mathematics for IIT JAM, GATE, CSIR NET, UGC NET.
All you need of Mathematics at this link: Mathematics
|
556 videos|198 docs
|

FAQs on Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths - Mathematics for IIT JAM, GATE, CSIR NET, UGC NET
| 1. What is Gauss elimination for solving systems of linear algebraic equations? |  |
| 2. How does Gauss elimination work? | |
Ans. Gauss elimination works by performing a sequence of elementary row operations on the system of equations. The elementary row operations include swapping two rows, multiplying a row by a nonzero constant, and adding a multiple of one row to another row. These operations are applied in a systematic manner to eliminate variables and transform the system into a triangular form.
| 3. Can Gauss elimination fail to solve a system of linear algebraic equations? | |
Ans. Yes, Gauss elimination can fail to solve a system of linear algebraic equations. This can happen if the system is inconsistent, meaning that there are no solutions, or if the system has infinitely many solutions. In such cases, the elimination process will encounter inconsistencies or redundancies, and the method will not yield a unique solution.
| 4. Are there any limitations or drawbacks of using Gauss elimination? | |
Ans. While Gauss elimination is a powerful method for solving systems of linear algebraic equations, it does have some limitations. One limitation is that it can be computationally expensive for large systems, as it involves numerous row operations. Additionally, the method may encounter numerical instability or round-off errors when working with systems that have coefficients with large magnitudes or when the system is ill-conditioned.
| 5. Are there any alternative methods to solve systems of linear algebraic equations? | |
Ans. Yes, there are alternative methods to solve systems of linear algebraic equations apart from Gauss elimination. Some commonly used methods include Gaussian elimination with partial pivoting, LU decomposition, and matrix inversion. These methods offer different advantages and disadvantages in terms of computational complexity, stability, and accuracy, and the choice of method depends on the specific characteristics of the system being solved.
Related Exams
About this Document

4.97/5
Rating

Apr 28, 2025
Last updated
Document Description: Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths for Mathematics 2025 is part of Mathematics for IIT JAM, GATE, CSIR NET, UGC NET preparation.
The notes and questions for Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths have been prepared according to the Mathematics exam syllabus. Information about Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths covers topics
like and Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths Example, for Mathematics 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths.
Introduction of Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths in English is available as part of our Mathematics for IIT JAM, GATE, CSIR NET, UGC NET
for Mathematics & Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths in Hindi for Mathematics for IIT JAM, GATE, CSIR NET, UGC NET course.
Download more important topics related with notes, lectures and mock test series for Mathematics
Exam by signing up for free. Mathematics: Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET
Description
Full syllabus notes, lecture & questions for Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET - Mathematics | Plus excerises question with solution to help you revise complete syllabus for Mathematics for IIT JAM, GATE, CSIR NET, UGC NET | Best notes, free PDF download
Information about Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths
In this doc you can find the meaning of Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths defined & explained in the simplest way possible. Besides explaining types of
Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths theory, EduRev gives you an ample number of questions to practice Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths tests, examples and also practice Mathematics
tests

Related Searches
Free
,CSIR NET
,Objective type Questions
,Summary
,Exam
,practice quizzes
,Semester Notes
,GATE
,mock tests for examination
,past year papers
,video lectures
,UGC NET
,Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths | Mathematics for IIT JAM
,ppt
,Previous Year Questions with Solutions
,GATE
,GATE
,UGC NET
,Extra Questions
,Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths | Mathematics for IIT JAM
,study material
,CSIR NET
,Important questions
,Viva Questions
,UGC NET
,CSIR NET
,MCQs
,Sample Paper
,shortcuts and tricks
,Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths | Mathematics for IIT JAM
;


Additional Information about Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths for Mathematics Preparation
Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths Free PDF Download
The Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths is an invaluable resource that delves deep into the core of the Mathematics exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths now and kickstart your journey towards success in the Mathematics exam.
Importance of Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths
The importance of Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths cannot be overstated, especially for Mathematics aspirants.
This document holds the key to success in the Mathematics exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths Notes
Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths Notes on EduRev are your ultimate resource for success.
Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths Mathematics Questions
The "Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths Mathematics Questions" guide is a valuable resource for all aspiring students preparing for the
Mathematics exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths on the App
Students of Mathematics can study Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Solution of Systems of Linear Algebraic Equations Using Gauss Elimination - CSIR-NET Maths is prepared as per the latest Mathematics syllabus.
|
© EduRev
|
Education Revolution
|



|






Signup to see your scores
go up
within 7 days!
within 7 days!
Takes less than 10 seconds to signup