Synchronous Motor - 1 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE) PDF Download

Principle of operation
In order to understand the principle of operation of a synchronous motor, let us examine what happens if we connect the armature winding (laid out in the stator) of a 3-phase synchronous machine to a suitable balanced 3-phase source and the field winding to a D.C source of appropriate voltage. The current flowing through the field coils will set up stationary magnetic poles of alternate North and South. ( for convenience let us assume a salient pole rotor, as shown in Fig. 50). On the other hand, the 3-phase currents flowing in the armature winding produce a rotating magnetic field rotating at synchronous speed. In other words there will be moving North and South poles established in the stator due to the 3-phase currents i.e at any location in the stator there will be a North pole at some instant of time and it will become a South pole after a time period corresponding to half a cycle. (after a time = 21f , where f = frequency of the supply). Let us assume that the stationary South pole in the rotor is aligned with the North pole in the stator moving in clockwise direction at a particular instant of time, as shown in Fig. 50. These two poles get attracted and
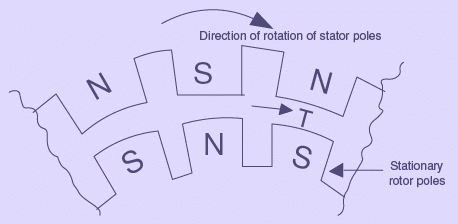
Figure 50: Force of attraction between stator poles and rotor poles - resulting in production of torque in clockwise direction
try to maintain this alignment ( as per lenz’s law) and hence the rotor pole tries to follow the stator pole as the conditions are suitable for the production of torque in the clockwise direction. However the rotor cannot move instantaneously due to its mechanical inertia, and so it needs sometime to move. In the mean time, the stator pole would quickly (a time duration corresponding to half a cycle) change its polarity and becomes a South pole. So the force of attraction will no longer be present and instead the like poles experience a force of repulsion as shown in Fig. 51. In other words, the conditions are now suitable for the
Figure 51: Force of repulsion between stator poles and rotor poles - resulting in production of torque in anticlockwise direction
production of torque in the anticlockwise direction. Even this condition will not last longer as the stator pole would again change to North pole after a time of  . Thus the rotor will experience an alternating force which tries to move it clockwise and anticlockwise at twice the frequency of the supply, i.e. at intervals corresponding to seconds. As this duration is quite small compared to the mechanical time constant of the rotor, the rotor cannot respond and move in any direction. The rotor continues to be stationary only.
. Thus the rotor will experience an alternating force which tries to move it clockwise and anticlockwise at twice the frequency of the supply, i.e. at intervals corresponding to seconds. As this duration is quite small compared to the mechanical time constant of the rotor, the rotor cannot respond and move in any direction. The rotor continues to be stationary only.
On the contrary if the rotor is brought to near synchronous speed by some external means say a small motor (known as pony motor-which could be a D.C or AC induction rotor) mounted on the same shaft as that of the rotor, the rotor poles get locked to the unlike poles in the stator and the rotor continues to run at the synchronous speed even if the supply to the pony motor is disconnected.
Thus the synchronous rotor cannot start rotating on its own or usually we say that the synchronous rotor has no starting torque. So, some special provision has to be made either inside the machine or outside of the machine so that the rotor is brought to near about its synchronous speed. At that time, if the armature is supplied with electrical power, the rotor can pull into step and continue to operate at its synchronous speed. Some of the commonly used methods for starting synchronous rotor are described in the following section.
Methods of starting synchronous motor
Basically there are three methods that are used to start a synchronous motor:
- To reduce the speed of the rotating magnetic field of the stator to a low enough value that the rotor can easily accelerate and lock in with it during one half-cycle of the rotating magnetic field’s rotation. This is done by reducing the frequency of the applied electric power. This method is usually followed in the case of inverter-fed synchronous motor operating under variable speed drive applications.
- To use an external prime mover to accelerate the rotor of synchronous motor near to its synchronous speed and then supply the rotor as well as stator. Ofcourse care should be taken to ensure that the direction of rotation of the rotor as well as that of the rotating magnetic field of the stator are the same. This method is usually followed in the laboratory- the synchronous machine is started as a generator and is then connected to the supply mains by following the synchronization or paralleling procedure. Then the power supply to the prime mover is disconnected so that the synchronous machine will continue to operate as a motor.
- To use damper windings or amortisseur windings if these are provided in the machine. The damper windings or amortisseur windings are provided in most of the large synchronous motors in order to nullify the oscillations of the rotor whenever the synchronous machine is sub jected to a periodically varying load.
Each of these methods of starting a synchronous motor are described below in detail.
Motor Starting by Reducing the supply Frequency
If the rotating magnetic field of the stator in a synchronous motor rotates at a low enough speed, there will be no problem for the rotor to accelerate and to lock in with the stator’s magnetic field. The speed of the stator magnetic field can then be increased to its rated operating speed by gradually increasing the supply frequency f up to its normal 50- or 60-Hz value.
This approach to starting of synchronous motors makes a lot of sense, but there is a big problem: Where from can we get the variable frequency supply? The usual power supply systems generally regulate the frequency to be 50 or 60 Hz as the case may be. However, variable-frequency voltage source can be obtained from a dedicated generator only in the olden days and such a situation was obviously impractical except for very unusual or special drive applications.
But the present day solid state power converters offer an easy solution to this. We now have the rectifier- inverter and cycloconverters, which can be used to convert a constant frequency AC supply to a variable frequency AC supply. With the development of such modern solid-state variable-frequency drive packages, it is thus possible to continuously control the frequency of the supply connected to the synchronous motor all the way from a fraction of a hertz up to and even above the normal rated frequency. If such a variable-frequency drive unit is included in a motor-control circuit to achieve speed control, then starting the synchronous motor is very easy-simply adjust the frequency to a very low value for starting, and then raise it up to the desired operating frequency for normal running.
When a synchronous motor is operated at a speed lower than the rated speed, its internal generated voltage (usually called the counter EMF) EA = K φω will be smaller than normal.
As such the terminal voltage applied to the motor must be reduced proportionally with the frequency in order to keep the stator current within the rated value. Generally, the voltage in any variable-frequency power supply varies roughly linearly with the output frequency.
Motor Starting with an External Motor
The second method of starting a synchronous motor is to attach an external starting motor (pony motor) to it and bring the synchronous machine to near about its rated speed (but not exactly equal to it, as the synchronization process may fail to indicate the point of closure of the main switch connecting the synchronous machine to the supply system) with the pony motor. Then the output of the synchronous machine can be synchronised or paralleled with its power supply system as a generator, and the pony motor can be detached from the shaft of the machine or the supply to the pony motor can be disconnected. Once the pony motor is turned OFF, the shaft of the machine slows down, the speed of the rotor magnetic field BR falls behind Bnet, momentarily and the synchronous machine continues to operate as a motor. As soon as it begins to operates as a motor the synchronous motor can be loaded in the usual manner just like any motor.
This whole procedure is not as cumbersome as it sounds, since many synchronous motors are parts of motor-generator sets, and the synchronous machine in the motor-generator set may be started with the other machine serving as the starting motor. More over, the starting motor is required to overcome only the mechanical inertia of the synchronous machine without any mechanical load ( load is attached only after the synchronous machine is paralleled to the power supply system). Since only the motor’s inertia must be overcome, the starting motor can have a much smaller rating than the synchronous motor it is going to start. Generally most of the large synchronous motors have brushless excitation systems mounted on their shafts. It is then possible to use these exciters as the starting motors. For many medium-size to large synchronous motors, an external starting motor or starting by using the exciter may be the only possible solution, because the power systems they are tied to may not be able to handle the starting currents needed to use the damper (amortisseur) winding approach described next.
Motor Starting by Using damper (Amortisseur) Winding
As already mentioned earlier most of the large synchronous motors are provided with damper windings, in order to nullify the oscillations of the rotor whenever the synchronous machine is sub jected to a periodically varying load. Damper windings are special bars laid into slots cut in the pole face of a synchronous machine and then shorted out on each end by a large shorting ring, similar to the squirrel cage rotor bars. A pole face with a set of damper windings is shown in Figure..
When the stator of such a synchronous machine is connected to the 3-Phase AC supply, the machine starts as a 3-Phase induction machine due to the presence of the damper bars, just like a squirrel cage induction motor. Just as in the case of a 3-Phase squirrel cage induction motor, the applied voltage must be suitably reduced so as to limit the starting current to the safe rated value. Once the motor picks up to a speed near about its synchronous speed, the DC supply to its field winding is connected and the synchronous motor pulls into step i.e. it continues to operate as a Synchronous motor running at its synchronous speed.
Behavior of a synchronous motor
The behavior of a synchronous motor can be predicted by considering its equivalent circuit on similar lines to that of a synchronous generator as described below.
Equivalent circuit model and phasor diagram of a synchronous motor
The equivalent-circuit model for one armature phase of a cylindrical rotor three phase synchronous motor is shown in Fig. 52 exactly similar to that of a synchronous generator except that the current flows in to the armature from the supply. All values are given per phase.
Applying Kirchhoff ’s voltage law to Fig. 52,
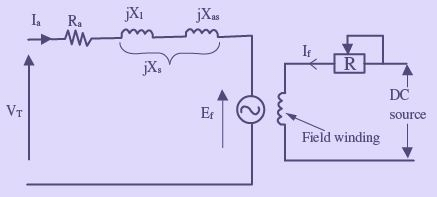
Figure 52: Equivalent-circuit model for one phase of a synchronous motor armature
 (58)
(58)
Combining reactances, we have
 (59)
(59)
Substituting Eqn. 59 in Eqn. 58

where: Ra = armature resistance (Ω/phase)
Xl = armature leakage reactance (Ω/phase)
Xs = synchronous reactance (Ω/phase)
Zs = synchronous impedance (Ω/phase)
VT = applied voltage/phase (V)
Ia = armature current/phase(A)
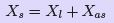
Figure 53: Phasor diagram corresponding to the equivalent-circuit model
A phasor diagram shown in Fig. 53, illustrates the method of determining the counter EMF which is obtained from the phasor equation;
The phase angle δ between the terminal voltage VT and the excitation voltage Ef in Fig. 53 is usually termed the torque angle. The torque angle is also called the load angle or power angle.
Synchronous-motor power equation
Except for very small machines, the armature resistance of a synchronous motor is relatively insignificant compared to its synchronous reactance, so that Eqn. 61 to be approximated to
 (62)
(62)
The equivalent-circuit and phasor diagram corresponding to this relation are shown in Fig. 54 and Fig. 55. These are normally used for analyzing the behavior of a synchronous motor, due to changes in load and/or changes in field excitation.
From this phasor diagram, we have,
 (63)
(63)
Multiplying through by VT and rearranging terms we have,
 (64)
(64)
Since the left side of Eqn. 64 is an expression for active power input and as the winding resistance is assumed to be negligible this power input will also represent the electromagnetic power developed, per phase, by the synchronous motor.
Thus,
 (65)
(65)
or
 (66)
(66)
Thus, for a three-phase synchronous motor,
 (67)
(67)
or
 (68)
(68)
Eqn. 66, called the synchronous-machine power equation, expresses the electro magnetic power developed per phase by a cylindrical-rotor motor, in terms of its excitation voltage and power angle. Assuming a constant source voltage and constant supply frequency, Eqn. 65 and Eqn. 66 may be expressed as proportionalities that are very useful for analyzing the behavior of a synchronous-motor:
 (69)
(69)
 (70)
(70)
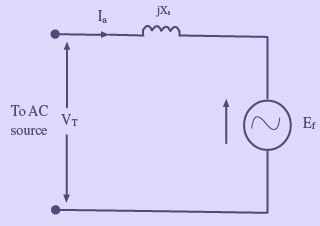
Figure 54: Equivalent-circuit of a synchronous-motor, assuming armature resistance is negligible
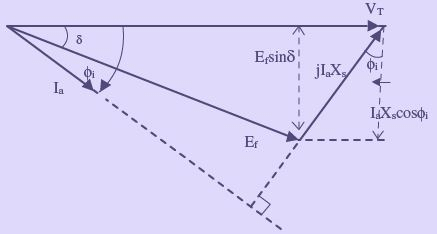
Figure 55: Phasor diagram model for a synchronous-motor, assuming armature resistance is negligible
Effect of changes in load on armature current, power angle, and power factor of synchronous motor
The effects of changes in mechanical or shaft load on armature current, power angle, and power factor can be seen from the phasor diagram shown in Fig. 56; As already stated, the applied stator voltage, frequency, and field excitation are assumed, constant. The initial load conditions, are represented by the thick lines. The effect of increasing the shaft load to twice its initial value are represented by the light lines indicating the new steady state conditions. These are drawn in accordance with Eqn. 69 and Eqn. 70, when the shaft load is doubled both Ia cos φi and Ef sin δ are doubled. While redrawing the phasor diagrams to show new steady-state conditions, the line of action of the new j IaXs phasor must be perpendicular to the new Ia phasor. Furthermore, as shown in Fig. 56, if the excitation is not changed, increasing the shaft load causes the locus of the Ef phasor to follow a circular arc, thereby increasing its phase angle with increasing shaft load. Note also that an increase in shaft load is also accompanied by a decrease in φi; resulting in an increase in power factor.
As additional load is placed on the machine, the rotor continues to increase its angle
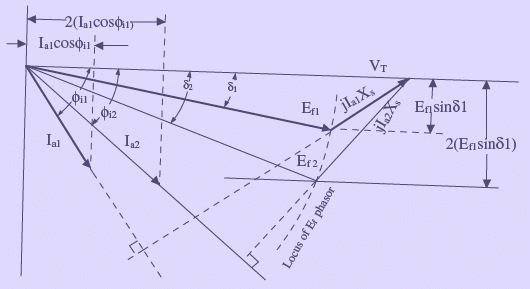
Figure 56: Phasor diagram showing effect of changes in shaft load on armature current, power angle and power factor of a synchronous motor
of lag relative to the rotating magnetic field, thereby increasing both the angle of lag of the counter EMF phasor and the magnitude of the stator current. It is interesting to note that during all this load variation, however, except for the duration of transient conditions whereby the rotor assumes a new position in relation to the rotating magnetic field, the average speed of the machine does not change. As the load is being increased, a final point is reached at which a further increase in δ fails to cause a corresponding increase in motor torque, and the rotor pulls out of synchronism. In fact as stated earlier, the rotor poles at this point, will fall behind the stator poles such that they now come under the influence of like poles and the force of attraction no longer exists. Thus, the point of maximum torque occurs at a power angle of approximately 90◦ for a cylindrical-rotor machine, as is indicated by Eqn. 68. This maximum value of torque that causes a synchronous motor to pull out of synchronism is called the pull-out torque. In actual practice, the motor will never be operated at power angles close to 90◦ as armature current will be many times its rated value at this load.
Effect of changes in field excitation on synchronous motor performance
Intuitively we can expect that increasing the strength of the magnets will increase the magnetic attraction, and thereby cause the rotor magnets to have a closer alignment with the corresponding opposite poles of the rotating magnetic poles of the stator. This will obviously result in a smaller power angle. This fact can also be seen in Eqn. 68. When the shaft load is assumed to be constant, the steady-state value of Ef sin δ must also be constant. An increase in Ef will cause a transient increase in Ef sin δ, and the rotor will accelerate. As the rotor changes its angular position, δ decreases until Ef sin δ has the same steady-state value as before, at which time the rotor is again operating at synchronous speed, as it should run only at the synchronous speed. This change in angular position of the rotor magnets relative to the poles of rotating magnetic field of the stator occurs in a fraction of a second.
The effect of changes in field excitation on armature current, power angle, and power factor of a synchronous motor operating with a constant shaft load, from a constant voltage, constant frequency supply, is illustrated in Fig. 57. From Eqn. 69, we have for a constant shaft load,
 (71)
(71)
This is shown in Fig. 57, where the locus of the tip of the Ef phasor is a straight line parallel to the VT phasor. Similarly, from Eqn. 69, for a constant shaft load,
 (72)
(72)
This is also shown in Fig. 57, where the locus of the tip of the Ia phasor is a line
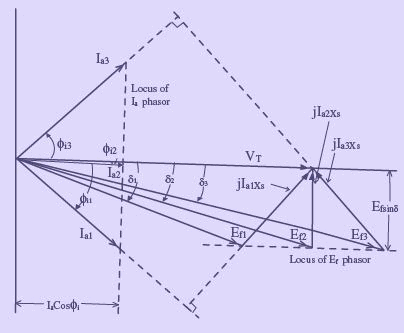
Figure 57: Phasor diagram showing effect of changes in field excitation on armature current, power angle and power factor of a synchronous motor perpendicular to the VT phasor.
Note that increasing the excitation from Ef 1 to Ef 3 in Fig. 57 caused the phase angle of the current phasor with respect to the terminal voltage VT (and hence the power factor) to go from lagging to leading. The value of field excitation that results in unity power factor is called normal excitation. Excitation greater than normal is called over excitation, and excitation less than normal is called under excitation. Furthermore, as indicated in Fig. 57, when operating in the overexcited mode, |Ef | > |VT |. In fact a synchronous motor operating under over excitation condition is sometimes called a synchronous condenser.
V curves
Curves of armature current vs. field current (or excitation voltage to a different scale) are called V curves, and are shown in Fig. 58 for typical values of synchronous motor loads. The curves are related to the phasor diagram in Fig. 57, and illustrate the effect of the variation of field excitation on armature current and power factor for typical shaft loads. It can be easily noted from these curves that an increase in shaft loads require an increase in field excitation in order to maintain the power factor at unity.
The locus of the left most point of the V curves in Fig. 58 represents the stability limit (δ = −90◦). Any reduction in excitation below the stability limit for a particular load will cause the rotor to pullout of synchronism.
The V curves shown in Fig. 58 can be determined experimentally in the laboratory by varying If at a constant shaft load and noting Ia as If is varied. Alternatively the V curves shown in Fig. 58 can be determined graphically by plotting |Ia|vs.|Ef | from a family of phasor diagrams as shown in Fig. 57, or from the following mathematical expression for the V curves
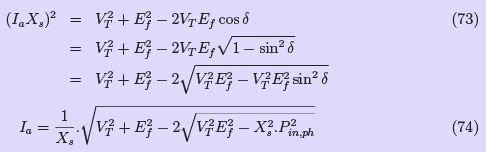
Eqn. 74 is based on the phasor diagram and the assumption that Ra is negligible. It is to be noted that instability will occur, if the developed torque is less than the shaft load plus friction and windage losses, and the expression under the square root sign will be negative.
The family of V curves shown in Fig. 58 represent computer plots of Eqn. 74, by taking the data pertaining to a three-phase 10 hp synchronous motor i.e Vph = 230V and Xs = 1.2Ω/phase.
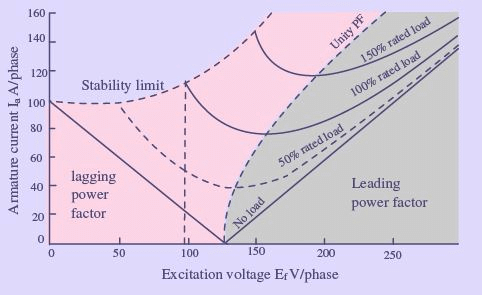
Figure 58: Family of representative V curves for a synchronous motor
Synchronous-motor losses and efficiency
The flow of power through a synchronous motor, from stator to rotor and then to shaft output, is shown in Fig. 59. As indicated in the power-flow diagram, the total power loss for the motor is given by
 (75)
(75)
where: Pscl= stator-copper loss
Pf cl = fie1d-copper.loss
Pcore = core loss
Pf,w = friction and windage loss
Pstray = stray load loss
Except for the transient conditions that occur when the field current is increased or decreased (magnetic energy stored or released), the total energy supplied to the field coils is constant and all of it is consumed as I 2R losses in the field winding. Just as in the case of the synchronous generator, the overall efficiency of a synchronous motor is given by
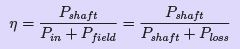 (76)
(76)
Generally, the nameplates of synchronous motors and manufacturers’ specification sheets customarily provide the overall efficiency for rated load and few load conditions only.
Hence, only the total losses at these loads can be determined. The separation of losses into the components listed in Eqn. 75 needs a very involved test procedure in the laboratory. However, a closer approximation of the mechanical power developed can be calculated by subtracting the copper losses of the armature and field winding if these losses can be calculated. The shaft power can then be calculated subtracting the mechanical losses from the mechanical power developed.
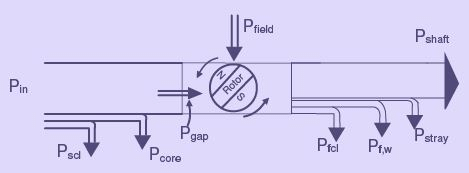
Figure 59: Power flow diagram for a synchronous motor
|
23 videos|94 docs|42 tests
|
FAQs on Synchronous Motor - 1 - Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
| 1. What is a synchronous motor? |  |
| 2. How does a synchronous motor work? | |
| 3. What are the advantages of a synchronous motor? | |
| 4. What are the applications of synchronous motors? | |
| 5. What is the difference between synchronous and asynchronous motors? | |



Sample Paper
,Free
,Exam
,Important questions
,Viva Questions
,mock tests for examination
,MCQs
,Synchronous Motor - 1 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,Synchronous Motor - 1 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,Previous Year Questions with Solutions
,Summary
,past year papers
,Objective type Questions
,Semester Notes
,study material
,video lectures
,practice quizzes
,ppt
,Extra Questions
,shortcuts and tricks
,Synchronous Motor - 1 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
;


Synchronous Motor - 1 Free PDF Download
Importance of Synchronous Motor - 1
Synchronous Motor - 1 Notes
Synchronous Motor - 1 Electrical Engineering (EE) Questions
Study Synchronous Motor - 1 on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!