The Direct Stiffness Method: Truss Analysis - 1 | Structural Analysis - Civil Engineering (CE) PDF Download

Instructional Objectives
After reading this chapter the student will be able to
1. Derive member stiffness matrix of a truss member.
2. Define local and global co-ordinate system.
3. Transform displacements from local co-ordinate system to global co-ordinate system.
4. Transform forces from local to global co-ordinate system.
5. Transform member stiffness matrix from local to global co-ordinate system.
6. Assemble member stiffness matrices to obtain the global stiffness matrix.
7. Analyse plane truss by the direct stiffness matrix.
Introduction
An introduction to the stiffness method was given in the previous chapter. The basic principles involved in the analysis of beams, trusses were discussed. The problems were solved with hand computation by the direct application of the basic principles. The procedure discussed in the previous chapter though enlightening are not suitable for computer programming. It is necessary to keep hand computation to a minimum while implementing this procedure on the computer. In this chapter a formal approach has been discussed which may be readily programmed on a computer. In this lesson the direct stiffness method as applied to planar truss structure is discussed.
Plane trusses are made up of short thin members interconnected at hinges to form triangulated patterns. A hinge connection can only transmit forces from one member to another member but not the moment. For analysis purpose, the truss is loaded at the joints. Hence, a truss member is subjected to only axial forces and the forces remain constant along the length of the member. The forces in the member at its two ends must be of the same magnitude but act in the opposite directions for equilibrium as shown in Fig. 24.1.

Now consider a truss member having cross sectional area A, Young’s modulus of material E, and length of the member L. Let the member be subjected to axial tensile force F as shown in Fig. 24.2. Under the action of constant axial force, applied at each end, the member gets elongated by u as shown in Fig. 24.2.
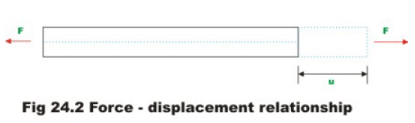
The elongation u may be calculated by (vide lesson 2, module 1).
 (24.1)
(24.1)
Now the force-displacement relation for the truss member may be written as,
 (24.2)
(24.2)
F = ku (24.3)
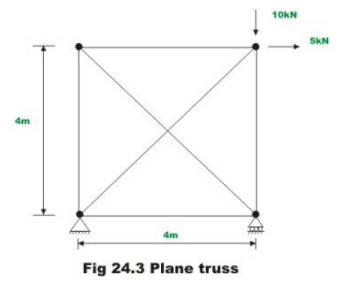
where  is the stiffness of the truss member and is defined as the force required for unit deformation of the structure. The above relation (24.3) is true along the centroidal axis of the truss member. But in reality there are many members in a truss. For example consider a planer truss shown in Fig. 24.3. For each member of the truss we could write one equation of the type F = ku along its axial direction (which is called as local co-ordinate system). Each member has different local co ordinate system. To analyse the planer truss shown in Fig. 24.3, it is required to write force-displacement relation for the complete truss in a co ordinate system common to all members. Such a co-ordinate system is referred to as global co ordinate system.
is the stiffness of the truss member and is defined as the force required for unit deformation of the structure. The above relation (24.3) is true along the centroidal axis of the truss member. But in reality there are many members in a truss. For example consider a planer truss shown in Fig. 24.3. For each member of the truss we could write one equation of the type F = ku along its axial direction (which is called as local co-ordinate system). Each member has different local co ordinate system. To analyse the planer truss shown in Fig. 24.3, it is required to write force-displacement relation for the complete truss in a co ordinate system common to all members. Such a co-ordinate system is referred to as global co ordinate system.
Local and Global Co-ordinate System
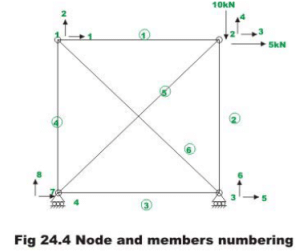
Loads and displacements are vector quantities and hence a proper coordinate system is required to specify their correct sense of direction. Consider a planar truss as shown in Fig. 24.4. In this truss each node is identified by a number and each member is identified by a number enclosed in a circle. The displacements and loads acting on the truss are defined with respect to global co-ordinate system xyz . The same co ordinate system is used to define each of the loads and displacements of all loads. In a global co-ordinate system, each node of a planer truss can have only two displacements: one along x -axis and another along y- axis. The truss shown in figure has eight displacements. Each displacement (degree of freedom) in a truss is shown by a number in the figure at the joint. The direction of the displacements is shown by an arrow at the node. However out of eight displacements, five are unknown. The displacements indicated by numbers 6,7 and 8 are zero due to support conditions. The displacements denoted by numbers 1-5 are known as unconstrained degrees of freedom of the truss and displacements denoted by 6-8 represent constrained degrees of freedom. In this course, unknown displacements are denoted by lower numbers and the known displacements are denoted by higher code numbers.
To analyse the truss shown in Fig. 24.4, the structural stiffness matrix K need to be evaluated for the given truss. This may be achieved by suitably adding all the member stiffness matrices k', which is used to express the force-displacement relation of the member in local co-ordinate system. Since all members are oriented at different directions, it is required to transform member displacements and forces from the local co-ordinate system to global co-ordinate system so that a global load-displacement relation may be written for the complete truss.
Member Stiffness Matrix
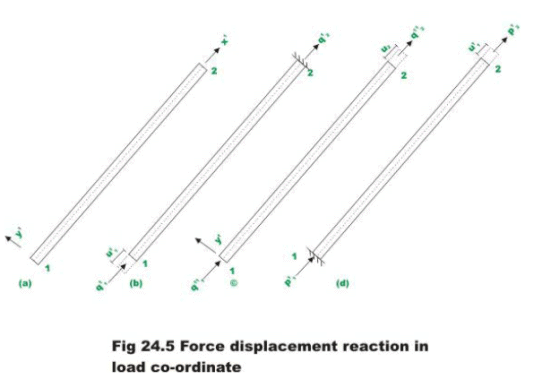
Consider a member of the truss as shown in Fig. 24.5a in local co-ordinate system x'y'. As the loads are applied along the centroidal axis, only possible displacements will be along x' -axis. Let the u'1 and u'2 be the displacements of truss members in local co-ordinate system i.e. along x' -axis. Here subscript 1 refers to node 1 of the truss member and subscript 2 refers to node 2 of the truss member. Give displacement u'1 at node 1 of the member in the positive x' direction, keeping all other displacements to zero. This displacement in turn induces a compressive force of magnitude  in the member. Thus
in the member. Thus  (24.4a) (−ve as it acts in the - ve direction for equilibrium). Similarly by giving positive displacements of u'2 at end 2 of the member, tensile force of magnitude
(24.4a) (−ve as it acts in the - ve direction for equilibrium). Similarly by giving positive displacements of u'2 at end 2 of the member, tensile force of magnitude  is induced in the member. Thus,
is induced in the member. Thus,
 (24.4b)
(24.4b)
Now the forces developed at the ends of the member when both the displacements are imposed at nodes 1 and 2 respectively may be obtained by method of superposition. Thus (vide Fig. 24.5d)
 (24.5a)
(24.5a)
 (24.5b)
(24.5b)
Or we can write
 (24.6a)
(24.6a)
 (24.6b)
(24.6b)
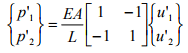
Thus the member stiffness matrix is
 (24.7)
(24.7)
This may also be obtained by giving unit displacement at node 1 and holding displacement at node 2 to zero and calculating forces developed at two ends. This will generate the first column of stiffness matrix. Similarly the second column of stiffness matrix is obtained by giving unit displacement at 2 and holding displacement at node 1 to zero and calculating the forces developed at both ends.
|
34 videos|140 docs|31 tests
|
FAQs on The Direct Stiffness Method: Truss Analysis - 1 - Structural Analysis - Civil Engineering (CE)
| 1. What is the direct stiffness method in truss analysis? |  |
| 2. How does the direct stiffness method work in truss analysis? | |
| 3. What are the advantages of using the direct stiffness method in truss analysis? | |
| 4. Are there any limitations to the direct stiffness method in truss analysis? | |
| 5. How is the direct stiffness method applied in practical truss analysis? | |



study material
,Important questions
,The Direct Stiffness Method: Truss Analysis - 1 | Structural Analysis - Civil Engineering (CE)
,shortcuts and tricks
,The Direct Stiffness Method: Truss Analysis - 1 | Structural Analysis - Civil Engineering (CE)
,video lectures
,Objective type Questions
,Semester Notes
,Summary
,ppt
,mock tests for examination
,Sample Paper
,Viva Questions
,Extra Questions
,Previous Year Questions with Solutions
,MCQs
,Exam
,past year papers
,practice quizzes
,Free
,The Direct Stiffness Method: Truss Analysis - 1 | Structural Analysis - Civil Engineering (CE)
;


The Direct Stiffness Method: Truss Analysis - 1 Free PDF Download
Importance of The Direct Stiffness Method: Truss Analysis - 1
The Direct Stiffness Method: Truss Analysis - 1 Notes
The Direct Stiffness Method: Truss Analysis - 1 Civil Engineering (CE) Questions
Study The Direct Stiffness Method: Truss Analysis - 1 on the App
|
© EduRev
|
Education Revolution
|



|






