Torque Slip (speed) Characteristics of Induction Motor (IM) | Basic Electrical Technology - Electrical Engineering (EE) PDF Download

Instructional Objectives
- Derivation of the expression for the gross torque developed as a function of slip (speed) of Induction motor
- Sketch the above characteristics of torque-slip (speed), explaining the various features
- Derive the expression of maximum torque and the slip (speed) at which it occurs
- Draw the above characteristics with the variation in input (stator) voltage and rotor resistance
Introduction
In the previous, i.e. third, lesson of this module, starting with the formulas for the induced emfs per phase in both stator and rotor windings, the equivalent circuit per phase of the three-phase induction motor (IM), has been derived. The relation between the rotor input, rotor copper loss and rotor output (gross) are derived next. Finally, the various losses − copper losses (stator/rotor), iron loss (stator) and mechanical loss, including the determination of efficiency, and also power flow diagram, are presented. In this lesson, firstly, the torque-slip (speed) characteristics of IM, i.e., the expression of the gross torque developed as a function of slip, will be derived. This is followed by the sketch of the different characteristics, with the variations in input (stator) voltage and rotor resistance, along with the features. Lastly, the expression of maximum torque developed and the slip (speed) at which it occurs, are derived.
Keywords: The equivalent circuit per phase of IM, gross torque developed, torque-slip (speed) characteristics, maximum torque, slip at maximum torque, variation of the characteristics with changes in input (stator) voltage and rotor resistance.
Gross Torque Developed
The current per phase in the rotor winding (the equivalent circuit of the rotor, per phase is shown in Fig. 31.1) is (as given in earlier lesson (#31))

Please note that the symbols used are same as given in the earlier lesson.In a similar way, the output power (gross) developed (W) is the loss in the fictitious resistance in the equivalent circuit as shown earlier, which is

The motor speed in rps is nr = (1 − s) ⋅ ns
The motor speed (angular) in rad/s is ωr = (1 − s) ⋅ωs
The gross torque developed in N ⋅ m is

The synchronous speed (angular) is ωs = 2π ⋅ ns The input power to the rotor (or the power transferred from the stator via air gap) is the loss in the total resistance ( r2 / s ), which is

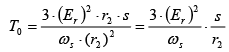
The relationship between the input power and the gross torque developed is Pi = ω s ⋅ T0 So, the input power is also called as torque in synchronous watts, or the torque is

Torque-slip (speed) Characteristics
The torque-slip or torque-speed characteristic, as per the equation derived earlier, is shown in Fig. 32.1. The slip is  The range of speed, nr is between 0.0 (standstill) and (synchronous speed). The range of slip is between 0.0
The range of speed, nr is between 0.0 (standstill) and (synchronous speed). The range of slip is between 0.0 
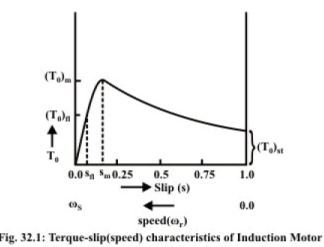
For low values of slip, r2 >> ( s ⋅ x 2 ) . So, torque is
This shows that  the characteristic being linear. The following points may be noted. The output torque developed is zero (0.0), at s = 0.0 or if the motor is rotated at synchronous speed (nr=ns ). This has been described in lesson No. 30, when the principle of operation was presented. Also, the slip at full load (output torque=(T0)f1 ) is normally 4-5%
the characteristic being linear. The following points may be noted. The output torque developed is zero (0.0), at s = 0.0 or if the motor is rotated at synchronous speed (nr=ns ). This has been described in lesson No. 30, when the principle of operation was presented. Also, the slip at full load (output torque=(T0)f1 ) is normally 4-5% , the full load speed of IM being 95-96% of
, the full load speed of IM being 95-96% of 
For large values of slip, r2 << ( s ⋅ x 2 ) . So, torque is

This shows that, , the characteristic being hyperbolic. The starting torque the characteristic being hyperbolic. The starting torque (s=1.0 , or nr = 0.0) developed, along with starting current, is discussed later. So, starting from low value of slip ( ), at which torque is proportional to slip,whereas for large values of slip (s<1.0),torque is inverse proportional to slip, both being derived earlier. In the characteristic shown, it may be observed that torque reaches a maximum value, which can be obtained in the following way. The relation between torque and slip is
, the characteristic being hyperbolic. The starting torque the characteristic being hyperbolic. The starting torque (s=1.0 , or nr = 0.0) developed, along with starting current, is discussed later. So, starting from low value of slip ( ), at which torque is proportional to slip,whereas for large values of slip (s<1.0),torque is inverse proportional to slip, both being derived earlier. In the characteristic shown, it may be observed that torque reaches a maximum value, which can be obtained in the following way. The relation between torque and slip is
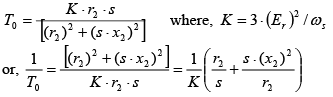
To determine the maximum value of torque ( T0) in terms of slip, the minimum value of its inverse (1/T0 ) need be determined from the relation,
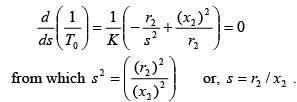
Please note that, for motoring condition as shown earlier, slip, s is positive (+ve), as nr < ns . At this slip, s = sm , r2 = s m ⋅ x2 . This may be termed as slip at maximum torque. The motor speed is [ (nr ) m = (1 − s m ) ns ]. This value of slip is small, for normal wound rotor (or slip ring) IM, without any additional resistance inserted in the rotor circuit. This value is higher in the case of squirrel cage IM. Substituting the value of s, the maximum value of torque is
which shows that it is independent of r2 The maximum torque is also termed as pull out torque. If the load torque on the motor exceeds this value, the motor will stall, i,e. will come to standstill condition.The values of maximum torque and the slip at that torque, can be obtained by using

which is not shown here. It may be observed from the torque-slip characteristic (Fig. 32.1), or described earlier, that the output torque developed increases, if the slip increases from 0.0 to  motor speed decreases from ns to (nr)m This ensures stable operation of IM in this region (0.0<s<sm ), for constant load torque. But the output torque developed decreases, if the slip increases from sm to 1.0, or the motor speed decreases from (nr )m .to zero (0.0). This results in unstable operation of IM in this region (sm<s<1.0 ), for constant load torque. However, for fan type loads with the torque as
motor speed decreases from ns to (nr)m This ensures stable operation of IM in this region (0.0<s<sm ), for constant load torque. But the output torque developed decreases, if the slip increases from sm to 1.0, or the motor speed decreases from (nr )m .to zero (0.0). This results in unstable operation of IM in this region (sm<s<1.0 ), for constant load torque. However, for fan type loads with the torque as  stable operation of IM is achieved in this region
stable operation of IM is achieved in this region
Starting Current and Torque
The starting current (rotor) is
as slip at starting ( nr=0.0) is 1.0, which is the same at standstill (or stalling condition). The magnitude of the induced voltage per phase in the stator winding is nearly same as input voltage per phase fed to the stator, if the voltage drop in the stator impedance, being small, is neglected, i.e.Vs ≈Es . As shown in the earlier lesson (#31), the ratio of the induced emfs per phase in the stator and rotor winding can be taken as the ratio of the effective turns in two windings, i.e. where
where and
and
 The winding factor for the stator winding is k ws = k ds ⋅ k ps . Same formula is used for the above factor in the rotor winding, assuming it to be wound rotor one.
The winding factor for the stator winding is k ws = k ds ⋅ k ps . Same formula is used for the above factor in the rotor winding, assuming it to be wound rotor one.
The starting current in the stator winding can be shown as  neglecting the no load current. This current is normally large, much greater than full load current. This current is reduced by using starters in both types (cage and wound rotor) of IM, which will be taken up in the next lesson. The starting torque in N ⋅ m is
neglecting the no load current. This current is normally large, much greater than full load current. This current is reduced by using starters in both types (cage and wound rotor) of IM, which will be taken up in the next lesson. The starting torque in N ⋅ m is

This expression is obtained substituting s = 1.0 in the expression of T0 derived earlier. If the starter is used, the starting torque is also reduced, as is the case with starting current. Torque-slip (speed) Characteristics, with variation in input (stator) voltage and rotor circuit resistance

The set of torque-slip characteristics with variation in input (stator) voltage is shown in Fig. 32.2a. The point to note that the torque at a given slip decreases with the decrease in input (stator) voltage, as  The characteristics shown are for decreasing stator voltages
The characteristics shown are for decreasing stator voltages  The speed decreases or the slip increases with constant load torque, as the input (stator) voltage decreases. The region for stable operation with constant load torque remains same
The speed decreases or the slip increases with constant load torque, as the input (stator) voltage decreases. The region for stable operation with constant load torque remains same 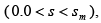 as given earlier. But again, stable operation can be obtained in the region
as given earlier. But again, stable operation can be obtained in the region  with fan type loads with the torque as
with fan type loads with the torque as  Another problem is that the maximum or pull-out torque decreases as
Another problem is that the maximum or pull-out torque decreases as  where V is input (stator) voltage, which is a drawback with constant load torque operation..
where V is input (stator) voltage, which is a drawback with constant load torque operation..
The set of torque-slip characteristics with variation in rotor circuit resistance is shown in Fig. 32.2b. The characteristics shown are for increasing rotor circuit resistances
 The point to note that, the maximum torque remains same for all the characteristics. This has been shown earlier that the maximum torque depends on rotor reactance only, but not on rotor circuit resistance. Only the slip at maximum torque increases with the increase in rotor circuit resistance. So, for constant load torque operation, the slip increases or the speed decreases with the increase in rotor circuit resistance. The motor efficiency decreases, as the rotor copper loss increases with the increase in slip. The load torque remains same, but the output power decreases, as the speed decreases. Also, it may be observed that the starting torque increases with the increase in rotor circuit resistance, with the total rotor circuit resistance lower than rotor reactance. The starting torque is equal to the maximum torque, when the total rotor circuit resistance is equal to rotor reactance. If the rotor circuit resistance is more than rotor reactance, the starting torque decreases.
The point to note that, the maximum torque remains same for all the characteristics. This has been shown earlier that the maximum torque depends on rotor reactance only, but not on rotor circuit resistance. Only the slip at maximum torque increases with the increase in rotor circuit resistance. So, for constant load torque operation, the slip increases or the speed decreases with the increase in rotor circuit resistance. The motor efficiency decreases, as the rotor copper loss increases with the increase in slip. The load torque remains same, but the output power decreases, as the speed decreases. Also, it may be observed that the starting torque increases with the increase in rotor circuit resistance, with the total rotor circuit resistance lower than rotor reactance. The starting torque is equal to the maximum torque, when the total rotor circuit resistance is equal to rotor reactance. If the rotor circuit resistance is more than rotor reactance, the starting torque decreases.
In this lesson − the fourth one of this module, the expression of gross torque developed, as a function of slip (speed), in IM has been derived first. The sketches of the different torque-slip (speed) characteristics, with the variations in input (stator) voltage and rotor resistance, are presented, along with the explanation of their features. Lastly, the expression of maximum torque developed and also the slip, where it occurs, have been derived. In the next lesson, the various types of starters used in IM will be presented, along with the need of the starters, followed by the comparison of the starting current and torque developed using the starters.
|
74 docs|62 tests
|
FAQs on Torque Slip (speed) Characteristics of Induction Motor (IM) - Basic Electrical Technology - Electrical Engineering (EE)
| 1. What is torque slip characteristic of an induction motor? |  |
| 2. What is slip in an induction motor? | |
| 3. How does the torque slip characteristic vary with load in an induction motor? | |
| 4. What information can be obtained from the torque slip characteristic of an induction motor? | |
| 5. How does the torque slip characteristic affect the speed control of an induction motor? | |



video lectures
,Summary
,Free
,mock tests for examination
,Previous Year Questions with Solutions
,study material
,Semester Notes
,MCQs
,shortcuts and tricks
,ppt
,Exam
,Torque Slip (speed) Characteristics of Induction Motor (IM) | Basic Electrical Technology - Electrical Engineering (EE)
,Objective type Questions
,Viva Questions
,Sample Paper
,Torque Slip (speed) Characteristics of Induction Motor (IM) | Basic Electrical Technology - Electrical Engineering (EE)
,practice quizzes
,Torque Slip (speed) Characteristics of Induction Motor (IM) | Basic Electrical Technology - Electrical Engineering (EE)
,Important questions
,past year papers
,Extra Questions
;






Torque Slip (speed) Characteristics of Induction Motor (IM) Free PDF Download
Importance of Torque Slip (speed) Characteristics of Induction Motor (IM)
Torque Slip (speed) Characteristics of Induction Motor (IM) Notes
Torque Slip (speed) Characteristics of Induction Motor (IM) Electrical Engineering (EE) Questions
Study Torque Slip (speed) Characteristics of Induction Motor (IM) on the App
|
© EduRev
|
Education Revolution
|



|





