Two-dimensional motion of rigid bodies - Classical Mechanics, CSIR-NET Mathematical Sciences | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET PDF Download

Rotational Motion of a Rigid Body
Rotational motion is more complicated than linear motion, and only the motion of rigid bodies will be considered here. A rigid body is an object with a mass that holds a rigid shape, such as a phonograph turntable, in contrast to the sun, which is a ball of gas. Many of the equations for the mechanics of rotating objects are similar to the motion equations for linear motion.
Angular velocity and angular acceleration
The angular displacement of a rotating wheel is the angle between the radius at the beginning and the end of a given time interval. The SI units are radians. The average angular velocity (ω, Greek letter omega), measured in radians per second,
radians per second, is 
The angular acceleration (α, Greek letter alpha) has the same form as the linear quantity 
and is measured in radians/second/second or rad/s2.
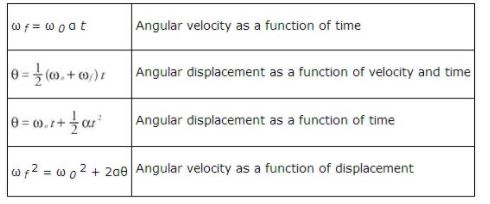
The kinematics equations for rotational motion at constant angular acceleration are
Consider a wheel rolling without slipping in a straight line. The forward displacement of the wheel is equal to the linear displacement of a point fixed on the rim. As can be shown in Figure , d= S = rθ
A wheel rolling without slipping. In this case, the average forward speed of the wheel is v = d/ t = ( rθ)/ t = rω, where r is the distance from the center of rotation to the point of the calculated velocity. The direction of the velocity is tangent to the path of the point of rotation. The average forward acceleration of the wheel is a T = r(ω f − ω o)/ t = rα. This component of the acceleration is tangential to the point of rotation and represents the changing speed of the object. The direction is the same as the velocity vector.
The radial component of the linear acceleration is a r = v 2/ r = ω 2 r.
Torque
It is easier to open a door by pushing on the edge farthest from the hinges than by pushing in the middle. It is intuitive that the magnitude of the force applied and the distance from the point of application to the hinge affect the tendency of the door to rotate. This physical quantity, torque, is t = r × F sin θ, where F is the force applied, r is the distance from the point of application to the center of the rotation, and θ is the angle from r to F.
Moment of inertia
Substitute Newton's second law into the definition for torque with θ of 90 degrees (a right angle between F and r) and use the relationship between linear acceleration and tangential angular acceleration to obtain t = r F = rma = mr 2 ( a/ r) = mr 2α. The quantity mr 2 is defined as moment of inertia of a point mass about the center of rotation.
Imagine two objects of the same mass with different distribution of that mass. The first object might be a heavy ring supported by struts on an axle like a flywheel. The second object could have its mass close to the central axis. Even though the masses of the two objects are equal, it is intuitive that the flywheel will be more difficult to push to a high number of revolutions per second because not only the amount of mass but also the distribution of the mass affects the ease in initiating rotation for a rigid body. The general definition of moment of inertia, also called rotational inertia, for a rigid body is I = ∑ m i r i 2 and is measured in SI units of kilogram‐meters 2.
The moments of inertia for different regular shapes are shown in Figure 2.
Moments of inertia for various regular shapes.
Mechanics problems frequently include both linear and rotation motions.
Example 1: Consider Figure 3, where a mass is hanging from a rope wrapped around a pulley. The falling mass (m) causes the pulley to rotate, and it is no longer necessary to require the pulley to be massless. Assign mass ( M) to the pulley and treat it as a rotating disc with radius (R). What is the acceleration of the falling mass, and what is the tension of the rope?
A hanging mass spins a pulley.
The force equation for the falling mass is T − mg = − ma. The tension of the rope is the applied force to the edge of the pulley that is causing it to rotate. Thus, t = Iα, or TR = (1/2) MR 2( a/R), which reduces to T = (1/2) Ma, where angular acceleration has been replaced by a/R because the cord does not slip and the linear acceleration of the block is equal to the linear acceleration of the rim of the disk. Combining the first and last equation in this example leads to

Angular momentum is rotational momentum that is conserved in the same way that linear momentum is conserved. For a rigid body, the angular momentum (L) is the product of the moment of inertia and the angular velocity: L = Iω. For a point of mass, angular momentum can be expressed as the product of linear momentum and the radius ( r): L = mvr. L is measured in units of kilograms‐meters 2 per second or more commonly joule‐seconds. The law of conservation of angular momentum can be stated that the angular momentum of a system of objects is conserved if there is not external net torque acting on the system.
Analogous to Newton's law (F = Δ( mv)/Δ t) there is a rotational counterpart for rotational motion: t = Δ L/Δ t, or torque is the rate of change of angular momentum.
Consider the example of a child who runs tangential to the edge of a playground merry‐go‐round with a velocity v o and jumps on while the merry‐go‐round is at rest. The only external forces are that of gravity and the contact forces provided by the support bearings, neither of which causes a torque because they are not applied to cause a horizontal rotation. Treat the child's mass as a point of mass and the merry‐go‐round as a disc with a radius R and mass M. From the conservation law, the total angular momentum of the child before the interaction is equal to the total angular momentum of the child and merry‐go‐round after the collision: mrv o = mrv′ + Iω, where r is the radial distance from the center of the merry‐go‐round to the place where the child hits. If the child jumps on the edge, (r = R) and the angular velocity for the child after the collision can be substituted for the linear velocity, mRv o = mR( Rω)+(1/2) MR 2. If the values for the masses and the initial velocity of the child are given, the final velocity of the child and merry‐go‐round can be calculated.
A single object may have a change in angular velocity due to the conservation of angular momentum if the distribution of the mass of the rigid body is altered. For example, when a figure skater pulls in her extended arms, her moment of inertia will decrease, causing an increase in angular velocity. According to the conservation of angular momentum, I o (ω o ) = I f (ω f ) where I o is the moment of inertia of the skater with arms extended, I f is her moment of inertia with her arms close to her body, ω o is her original angular velocity, and ω f is her final angular velocity.
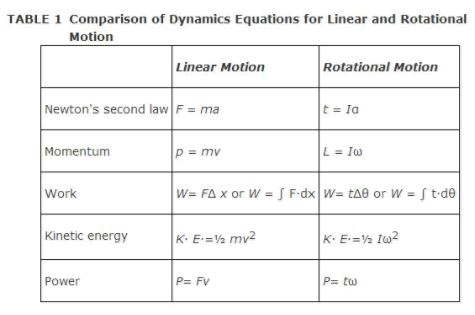
Rotational kinetic energy, work, and power. Kinetic energy, work, and power are defined in rotational terms as K. E=(1/2) Iω 2, W= tθ, P= tω.
Comparison of dynamics equation for linear and rotational motion.The dynamic relations are given to compare the equation for linear and rotational motion (see Table ).
|
556 videos|198 docs
|
FAQs on Two-dimensional motion of rigid bodies - Classical Mechanics, CSIR-NET Mathematical Sciences - Mathematics for IIT JAM, GATE, CSIR NET, UGC NET
| 1. What is two-dimensional motion of rigid bodies in classical mechanics? |  |
| 2. What are some examples of two-dimensional motion of rigid bodies? | |
| 3. How is two-dimensional motion of rigid bodies different from one-dimensional motion? | |
| 4. What mathematical concepts are used to analyze two-dimensional motion of rigid bodies? | |
| 5. What applications does the study of two-dimensional motion of rigid bodies have? | |



CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,CSIR NET
,Two-dimensional motion of rigid bodies - Classical Mechanics
,CSIR NET
,Exam
,Extra Questions
,Viva Questions
,UGC NET
,GATE
,Semester Notes
,study material
,Important questions
,video lectures
,GATE
,UGC NET
,GATE
,MCQs
,CSIR NET
,Summary
,CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,Previous Year Questions with Solutions
,ppt
,past year papers
,shortcuts and tricks
,mock tests for examination
,Sample Paper
,Two-dimensional motion of rigid bodies - Classical Mechanics
,Two-dimensional motion of rigid bodies - Classical Mechanics
,practice quizzes
,UGC NET
,CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,Free
,Objective type Questions
;






Two-dimensional motion of rigid bodies - Classical Mechanics, CSIR-NET Mathematical Sciences Free PDF Download
Importance of Two-dimensional motion of rigid bodies - Classical Mechanics, CSIR-NET Mathematical Sciences
Two-dimensional motion of rigid bodies - Classical Mechanics, CSIR-NET Mathematical Sciences Notes
Two-dimensional motion of rigid bodies - Classical Mechanics, CSIR-NET Mathematical Sciences Mathematics Questions
Study Two-dimensional motion of rigid bodies - Classical Mechanics, CSIR-NET Mathematical Sciences on the App
|
© EduRev
|
Education Revolution
|



|





