Uncontrolled Intersection | Transportation Engineering - Civil Engineering (CE) PDF Download
Introduction
Uncontrolled intersections are the traffic junctions where there is no explicit traffic control measures are adopted. The important aspects that will be covered in this chapter are: the concept of two-way stop controlled intersection, all-way stop controlled intersection, gap acceptance, critical gap, follow-up time, potential capacity, and delay determination. These concepts are primarily adopted from Highway Capacity Manual.
Categories of Intersection
An intersection is a road junction where two or more roads either meet or cross at grade. This intersection includes the areas needed for all modes of travel: pedestrian, bicycle, motor vehicle, and transit. Thus, the intersection includes not only the pavement area, but typically the adjacent sidewalks and pedestrian curb cut ramps.
All the road junctions designated for the vehicles to turn to different directions to reach their desired destinations. Traffic intersections are complex locations on any highway. This is because vehicles moving in different direction want to occupy same space at the same time. In addition, the pedestrians also seek same space for crossing. Drivers have to make split second decision at an intersection by considering his route, intersection geometry, speed and direction of other vehicles etc. A small error in judgment can cause severe accidents. It causes delay and it depends on type, geometry, and type of control. Overall traffic flow depends on the performance of the intersections. It also affects the capacity of the road. Therefore, both from the accident perspective and the capacity perspective, the study of intersections are very important by the traffic engineers. Intersection design can vary widely in terms of size, shape, number of travel lanes, and number of turn lanes. Basically, there are four types of intersections, determined by the number of road segments and priority usage.
1. Priority Intersection: Occur where one of the intersecting roads is given definite priority over the other. The minor road will usually be controlled by some form of sing marking, such as stop or yield sign; thus ensuring that priority vehicles travailing on the main street will incur virtually no delay.
2. Space sharing intersection: Are intended to permit fully equally priority and to permit continuous movement for all intersecting vehicle flows; example would be rotaries and other weaving areas.
3. Time Sharing Intersection: Are those at which alternative flows are given the right of way at different point in time. This type of intersection is controlled by traffic signal or by police officer.
4. Uncontrolled intersection: are the most common type of intersection usually occurs where the intersecting roads are relatively equal importance and found in areas where there is not much traffic shown in Fig. 30:1.
At uncontrolled intersection the arrival rate and individuals drivers generally determine the manner of operation, while the resulting performance characteristics are derived from joint consideration of flow conditions and driver judgment and behavior patterns. In simplest terms, an intersection, one flow of traffic seeks gaps in the opposing flow of traffic.
At priority intersections, since one flow is given priority over the right of way it is clear that the secondary or minor flow is usually the one seeking gaps. By contrast at uncontrolled intersection, each flow must seek gaps in the other opposing flow. When flows are very light, which is the case on most urban and rural roads large gaps exist in the flows and thus few situation arise when vehicles arrive at uncontrolled intersection less than 10 second apart or at interval close enough to cause conflicts. However when vehicles arrive at uncontrolled intersection only a few second apart potential conflicts exist and driver must judge their relative time relationships and adjusts accordingly.
Generally one or both vehicles most adjust their speeds i.e. delayed somewhat with the closer vehicle most often taking the right of way; in a sense, of course, the earlier arriving vehicle has priority and in this instance when two vehicles arrive simultaneous, the rule of the road usually indicate priority for the driver on the right. The possibility of judgmental in these, informal priority situation for uncontrolled intersection is obvious. At an Uncontrolled intersection: Service discipline is typically controlled by signs (stop or yield signs) using two rules two way stop controlled intersection (TWSC) and all way stop controlled intersection (AWSC)
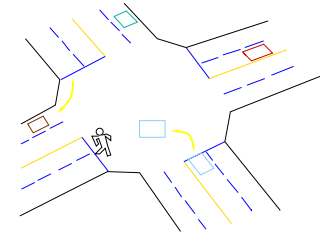
Figure 30:1: Example showing uncontrolled intersection
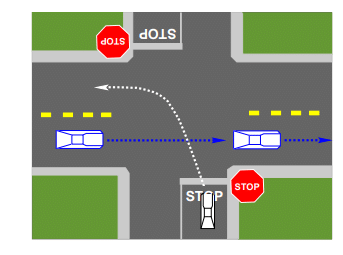
Figure 30:2: Two way stop controlled intersection
Two-way stop-controlled intersection
Researchers rely on many specific definitions to describe the performance of traffic operation systems. The clear understanding of such terminology is an important element is studying two-way stop-controlled (TWSC) traffic operation system characteristics; defined as: One of the uncontrolled intersections with stop control on the minor street shown in Fig. 30:2.
Characteristics of TWSC Intersections
At TWSC intersections, the stop-controlled approaches are referred to as the minor street approaches; the intersection approaches that are not controlled by stop signs are referred to as the major street approaches. A three-leg intersection is considered to be a standard type of
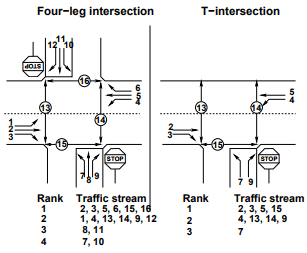
Figure 30:3: Traffic flow stream in two way stop controlled intersection
TWSC intersection if the single minor street approach is controlled by a stop sign. Three-leg intersections where two of the three approaches are controlled by stop signs are a special form of uncontrolled intersection control. Flows at TWSC Intersections TWSC intersections assign the right-of-way among conflicting traffic streams according to the following hierarchy:
1. The major street through and right-turning movements are the highest-priority movements at a TWSC intersection. This movements shown Fig. 30:3 are 2, 3, 5, 6, 15 and 16.
2. Vehicles turning left from the major street onto the minor street yield only to conflicting major street through and right-turning vehicles. All other conflicting movements yield to these major street left-turning movements. The movements on this rank are 1, 4, 13, 14, 9 and 12.
3. Minor Street through vehicles yield to all conflicting major street through, right-turning, and left-turning movements. The movements on this rank are 8 and 11.
4. Minor Street left-turning vehicles yield to all conflicting major street through, rightturning, and left-turning vehicles and to all conflicting minor street through and rightturning vehicles. The movements on this rank are 7 and 10.
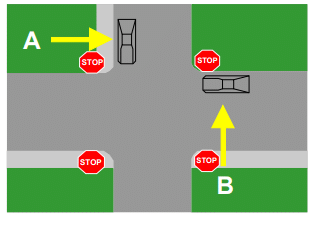
Figure 30:4: All way stop controlled intersection
All-way-stop-controlled intersection
All-way-stop-controlled intersection (AWSC) are mostly used approaching from all directions and is required to stop before proceeding through the intersection as shown in Fig. 30:4. An all-way stop may have multiple approaches and may be marked with a supplemental plate stating the number of approaches. The analysis of AWSC intersection is easier because all users must stop. In this type of intersection the critical entity of the capacity is the average intersection departure head way. Secondary parameters are the number of cross lanes, turning percentages, and the distribution volume on each approach. The first step for the analysis of capacity is select approach called subject approach the approach opposite to subject approach is opposing approach, and the approach on the side of the subject approach is are called conflicting approach.
Characteristics of AWSC intersections
AWSC intersections require every vehicle to stop at the intersection before proceeding. Since each driver must stop, the judgment as to whether to proceed into the intersection is a function of traffic conditions on the other approaches. If no traffic is present on the other approaches, a driver can proceed immediately after the stop is made. If there is traffic on one or more of the other approaches, a driver proceeds only after determining that there are no vehicles currently in the intersection and that it is the drivers turn to proceed.
Gap acceptance and follow-up time
Gap acceptance is one of the most important components in microscopic traffic characteristic. The gap acceptance theory commonly used in the analysis of uncontrolled intersections based on the concept of defining the extent drivers will be able to utilize a gap of particular size or duration. A driver entering into or going across a traffic stream must evaluate the space between a potentially conflicting vehicle and decide whether to cross or enter or not. One of the most important aspects of traffic operation is the interaction of vehicles with in a single stream of traffic or the interaction of two separate traffic streams. This interaction takes place when a driver changes lanes merging in to a traffic stream or crosses a traffic stream. Inherent in the traffic interaction associated with these basic maneuvers is concept of gap acceptance.
Basic Terminologies
1. Gap means the time and space that a subject vehicle needs to merge adequately safely between two vehicles. Gap acceptance is the minimum gap required to finish lane changing safely. Therefore, a gap acceptance model can help describe how a driver judges whether to accept or not.
2. Gap acceptance: The process by which a minor stream vehicle accepts an available gap to maneuver.
3. Critical gap: The minimum major-stream headway during which a minor-street vehicle can make a maneuver.
4. Lag: Time interval between the arrival of a yielding vehicle and the passage of the next priority stream vehicle (Forward waiting time).
5. Headway: The time interval between the arrivals of two successive vehicles. Headway differs from gap because it is measured from the front bumper of the front vehicle to the front bumper of the next vehicle. 6. Minimum Headway: The minimum gap maintained by a vehicle in the major traffic stream.
7. Follow-up time: Time between the departure of one vehicle from the minor street and the departure of the next vehicle using the same gap under a condition of continuous queuing.
8. Delay: The additional travel time experienced by a driver, passenger or pedestrian.
9. Conflicting movements: The traffic streams in conflict at an intersection.
10. Capacity: The maximum hourly rate at which persons or vehicles can reasonably be expected to traverse a point or uniform section of a lane or a roadway during a given time period under prevailing roadway, traffic, and control conditions.
Critical Gap
The critical gap tcx for movement x is defined as the minimum average acceptable gap that allows intersection entry for one minor street or major street. The term average acceptable means that the average driver would accept or choose to utilize a gap of this size. The gap is measured as the clear time in the traffic stream defined by all conflicting movements. Thus, the model assumes that all gaps shorter than tcx are rejected or unused, while all gaps equal to or larger than tcx would be accepted or used. The adjusted critical gap tcx computed as follows.
tcx = tcb + tcHV PHV + tcGG − tc,T − t3,LT (30.1)
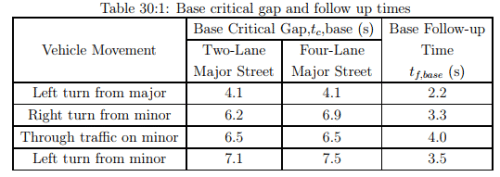
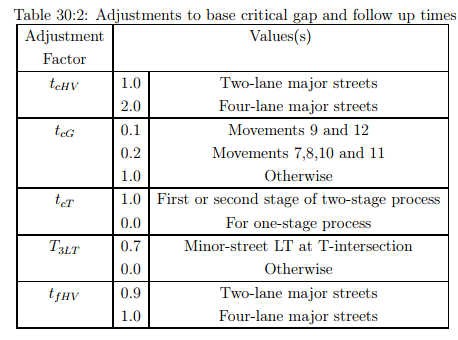
where, tcx is the critical gap for movement “x”, tcb is the base critical gap from Table. 30:1 tcHV is the adjustment factor for heavy vehicles PHV is the proportion of heavy vehicles tcG is the adjustment factor for grade G is the percent grade divided by 100, tcT is the adjustment factor for each part of a two-stage gap acceptance process, and t3LT is the critical gap adjustment factor for intersection geometry.
Follow-up time
The follow up time tfx for movement “x” is the minimum average acceptable time for a second queued minor street vehicle to use a gap large enough admit two or more vehicles. Followup times were measured directly by observing traffic flow. Resulting follow-up times were analyzed to determine their dependence on different parameters such as intersection layout. This measurement is similar to the saturation flow rate at signalized intersection. Table. 30:1 and 30:2 shows base or unadjusted values of the critical gap and follow up time for various movements. Base critical gaps and follow up times can be adjusted to account for a number of conditions, including heavy - vehicle presence grade, and the existence of two stage gap acceptance. Adjusted Follow up Time computed as:
tfx = tfb + tfHV PHV (30.2)
where, tfx is the follow-up time for minor movement x tfb is the base follow-up time from table 1 tfHV is the adjustment factor for heavy vehicles, and PHV is the proportion of heavy vehicles for minor movement.
Conflicting volume
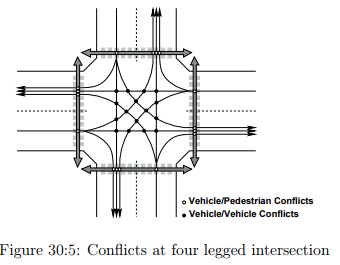
The traffic flow process at un-controlled intersection is complicated since there are many distinct vehicular movements to be accounted for. Most of this movements conflict with opposing vehicular volumes. These conflicts result in decreasing capacity, increasing delay, and increasing potentials for traffic accidents. Consider a typical four-legged intersection as shown in Fig. 30:5 The numbers of conflicts for competing through movements are 4, while competing right turn and through movements are 8. The conflicts between right turn traffics are 4, and between left turn and merging traffic are 4. The conflicts created by pedestrians will be 8 taking into account all the four approaches. Diverging traffic also produces about 4 conflicts. Therefore, a typical four legged intersection has about 32 different types of conflicts. Conflicts at an intersection are different for different types of intersection. The essence of the intersection control is to resolve these conflicts at the intersection for the safe and efficient movement of both vehicular traffic and pedestrians. The movements for determining conflict in four legged intersection are:
1. Major street left turns seek gaps through the opposing through movement, the opposing right turn movement and pedestrians crossing the far side of the minor street.
2. Minor street right turns seek to merge in to the right most lane of the major street, which contains through and right turning vehicles. Each right turn from the minor street must also cross the two pedestrians path shown.
3. Through movements from the minor street must cross all major street vehicular and pedestrians flows.
4. Minor street left turns must deal not only with all major street traffic flow but with two pedestrians flows and the opposing minor street through and right turn movements.
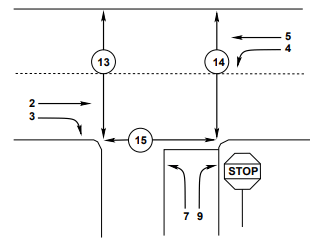
Figure 30:6: Three legged intersection conflicts volume determination for movement 7
Through this movements the conflict volume (Vcx) for the given movement x is can be computed. As an example the formula of conflict volume for movement 7 for three legged intersection shown in Fig. 30:6 computed as:
Vc7 = 2Vc4 + Vc5 + Vc2 + 0.5V3 + V13 + V15 (30.3)
Potential Capacity
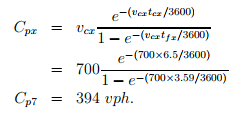
Capacity is defined as the maximum number of vehicles, passengers, or the like, per unit time, which can be accommodated under given conditions with a reasonable expectation of occurrence. Potential capacity describes the capacity of a minor stream under ideal conditions assuming that it is unimpeded by other movements and has exclusive use of a separate lane. Once of the conflicting volume, critical gap and follow up time are known for a given movement its potential capacity can be estimated using gap acceptance models. The concept of potential capacity assumes that all available gaps are used by the subject movement i.e.; there are no higher priority vehicular or pedestrian movements and waiting to use some of the gaps it also assumes that each movement operates out of an exclusive lane. The potential capacity of can be computed using the formula:

where, cpx is the potential capacity of minor movement x (veh/h), vcx is the conflicting flow rate for movement x (veh/h), tcx is the critical gap for minor movement x, and tfx is the follow-up time movement x.
Movement capacity and impedance effects
Vehicles use gaps at a TWSC intersection in a prioritized manner. When traffic becomes congested in a high-priority movement, it can impede lower-priority movements that are streams of Ranks 3 and 4 as shown in Fig. 30:4 from using gaps in the traffic stream, reducing the potential capacity of these movements. The ideal potential capacities must be adjusted to reflect the impedance effects of higher priority movements that may utilize some of the gaps sought by lower priority movements. This impedance may come due to both pedestrians and vehicular sources called movement capacity.
The movement capacity is found by multiplying the potential capacity by an adjustment factor. The adjustment factor is the product of the probability that each impeding movement will be blocking a subject vehicle. That is

where, Cmx is the movement capacity in vph, Cpx is the potential capacity movement x in vph, Pvi is the probability that impeding vehicular movement i is not blocking the subject flow; (also referred to as the vehicular impedance factor for movement i, Ppi is the probability that impeding pedestrian movement j is not blocking the subject flow; also referred to us the pedestrian impedance factor for the movement j.
Vehicular movements
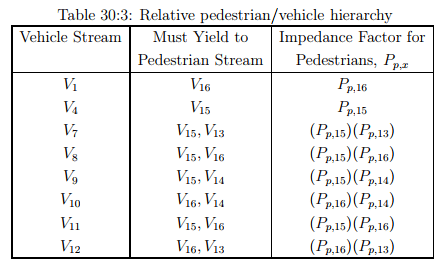
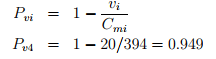
Priority 2 vehicular movements LTs from major street and RTs from minor street are not impeded by any other vehicular flow, as they represent the highest priority movements seeking gaps. They are impeded, however, by Rank 1 pedestrian movements. Priority 3 vehicular movements are impeded by Priority 2 vehicular movements and Priority l and 2 pedestrian movements seeking to use the same gaps. Priority 4 vehicular movements are impeded by Priority 2 and 3 vehicular movements, and Priority 1 and 2 pedestrian movements using the same gaps. Table. 30:3 lists the impeding flows for each subject movement in a four leg. Generally the rule stated the probability that impeding vehicular movement i is not blocking the subject movement is computed as
where, vi is the demand flow for impeding movement i, and Cmi is the movement capacity for impeding movement i vph. Pedestrian impedance factors are computed as:
Pedestrian Movements
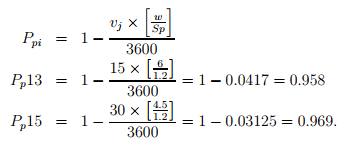
One of the impeding effects for all the movement is pedestrians movement. Both approaches of Minor-street vehicle streams must yield to pedestrian streams. Table. 30:3 shows that relative hierarchy between pedestrian and vehicular streams used. A factor accounting for pedestrian blockage is computed by Eqn. 30.7 on the basis of pedestrian volume, the pedestrian walking speed, and the lane width that is:

where, ppj is the pedestrian impedance factor for impeding pedestrian movement j, vj is the pedestrian flow rate, impeding movement j in peds/hr, w is the lane width in m, and Sp is the pedestrian walking speed in m/s.
Determining Shared Lane Capacity
The capacities of individual streams (left turn, through and right turn) are calculated separately. If the streams share a common traffic lane, the capacity of the shared lane is then calculated according to the shared lane procedure. But movement capacities still represent an assumption that each minor street movement operates out of an exclusive lane. Where two or three movements share a lane its combined capacity computed as:

where, CSH is the shared lane capacity in veh/hr, Vy is the flow rate, movement y sharing lane with other minor street flow, and Cmy is the movement capacity of movement y sharing lane with other minor street.
Determining control delay
Delay is a complex measure and depends on a number of variables it is a measure of driver discomfort, frustration, fuel consumption, increased travel time etc. Total delay is the difference between the travel time actually experienced and the reference travel time that would result during base conditions, in the absence of incident, control, traffic, or geometric delay. Also, Average control delay for any particular minor movement is a function of the Capacity of the approach and The degree of saturation. The control delay per vehicle for a movement in a separate lane is given by:

where, dx is the average control delay per vehicle for movement x in s/veh, Cmx is the capacity of movement or shared lane x in veh/hr, T is the analysis period h (15 min=0.25 h), and Vx is the demand flow rate, movement or shared lane x in veh/hr.
Performance measures
Four measures are used to describe the performance of TWSC intersections: control delay, delay to major street through vehicles, queue length, and v/c ratio. The primary measure that is used to provide an estimate of LOS is control delay. This measure can be estimated for any movement on the minor (i.e., the stop-controlled) street. By summing delay estimates for individual movements, a delay estimate for each minor street movement and minor street approach can be achieved.
For AWSC intersections, the average control delay (in seconds per vehicle) is used as the primary measure of performance. Control delay is the increased time of travel for a vehicle approaching and passing through an AWSC intersection, compared with a free flow vehicle if it were not required to slow or stop at the intersection. According to the performance measure
of the TWSC intersection, LOS of the minor-street left turn operates at level of service C approaches to B.
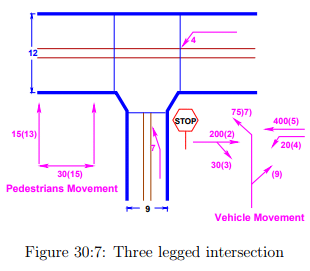
Numerical example
For a three legged intersection given in figure 30:7 determine the control delay and level of service for movement 7. The total volume of both pedestrian and vehicular traffic at each movement is given in the figure itself. Following data is also given:
• The speed of the pedestrians is 1.2m/s
• All flows contains 10% trucks
• The percentage of the grade is 0.00
• Ignore moments coming from south bound
• The analysis period is 15 min. (T=0.25)
Solution:
1. Compute the critical gap and follow up time:
(a) Critical gap tcx = tcb + tcHV PHV + tcGGtcT tLT . From table. 30:1 and table. 30:2 we have tcb = 7.1 s , tcG = 0.2, tcT = 0.0, tLT = 0.0. Then tcx at movement 7 computed as: tc7 = 7.1 + 1.0 × 0.1+0.2 × 0.0 - 0.0 - 0.0 = 6.50 sec
(b) To compute the Follow up time: From table. 30:1 and table. 30:2 we have tfb = 3.5 s , tfHV = 0.9. Then tfx at movement 7 computed as: tfx = tfb + tfHV PHV tf7 = 3.5 + 0.9 × 0.1 = 3.59 sec.
2. Compute the conflicting flow rate:
Vc7 = 2V4 + V5 + V13 + V2 + 0.5V3 + V15
= 40 + 400 + 15 + 200 + 0.5 × 30 + 30
= 700 conflicts/hr
3. Determining potential capacity:
4.Determine the impudence effect of the movement capacity for movement 7: From the given figure movement 7 is impeded by vehicular movement 4 and 1 and pedestrian 13 and 15. (a) Pedestrian impedance probability computed as:
(b) Vehicular impedance probabilities are:
(c) Once the pedestrian and vehicular impedance is determined, the moment capacity is computed as:

5. Delay computation: The delay is Calculated by using the formula
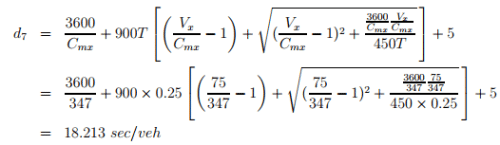
The delay of movement 7 is 18.213 sec/veh.
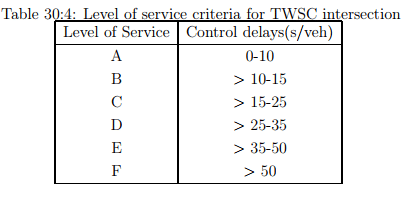
6. Determine the level of service: From the computed delay (18.213 se) in step 5 the level of service is LOS C obtained from HCM table.
Conclusion
This chapter focuses on theoretical analysis of capacity at uncontrolled intersections. First the gap acceptance theory and follow time was described; including conflict volume determination through the hierarchy of priorities for two ways stop controlled intersection. Second, after determining the potential capacity using the computed value and then prepare an adjustment for this capacity. Finally, computation of the delay to determine the level of service (LOS) of the given intersection is also described.
|
26 videos|91 docs|58 tests
|
FAQs on Uncontrolled Intersection - Transportation Engineering - Civil Engineering (CE)
| 1. What is an uncontrolled intersection in civil engineering? |  |
| 2. How are uncontrolled intersections different from controlled intersections? | |
| 3. What are the challenges associated with uncontrolled intersections? | |
| 4. How can civil engineers improve safety at uncontrolled intersections? | |
| 5. Are there specific guidelines or standards for designing uncontrolled intersections? | |

|
4.77/5 Rating |

|
Dec 22, 2024 Last updated |

|
Explore Courses for Civil Engineering (CE) exam
|
|
mock tests for examination
,Extra Questions
,practice quizzes
,Uncontrolled Intersection | Transportation Engineering - Civil Engineering (CE)
,Exam
,Viva Questions
,Sample Paper
,Summary
,Uncontrolled Intersection | Transportation Engineering - Civil Engineering (CE)
,shortcuts and tricks
,past year papers
,video lectures
,Previous Year Questions with Solutions
,ppt
,Free
,MCQs
,study material
,Uncontrolled Intersection | Transportation Engineering - Civil Engineering (CE)
,Important questions
,Objective type Questions
,Semester Notes
;






Uncontrolled Intersection Free PDF Download
Importance of Uncontrolled Intersection
Uncontrolled Intersection Notes
Uncontrolled Intersection Civil Engineering (CE) Questions
Study Uncontrolled Intersection on the App
|
© EduRev
|
Education Revolution
|



|




