Continuous Time LTI Systems | Signals and Systems - Electrical Engineering (EE) PDF Download
Continuous Time LTI Systems
In this section our goal is to derive the response of a LTI system for any arbitrary continuous input x(t). In complete analogy with the discussion on Discrete time analysis we begin by expressing x(t) in terms of impulses. In discrete time we represented a signal in terms of scaled and shifted unit impulses. In continuous time, however the unit impulse function is not an ordinary function (i.e. it is not defined at all points and we prefer to call the unit impulse function a "mathematical object"), it is a generalized function ( it is defined by its effect on other signals) .
Recall the previous discussion on the development of the unit impulse function. It can be regarded as the idealization of a pulse of width and Δ height 1/ Δ.
One can arrive at an expression for an arbitrary input, say x(t) by scaling the height of the rectangular impulse by a factor such that it's value at t coincides with the value of x(t) at the mid-point of the width of the rectangular impulse. The entire function is hence divided into such rectangular impulses which give a close approximation to the actual function depending upon how small the interval is taken to be. For example let x(t) be a signal. It can be approximated as :
The given input x(t) is approximated with such narrow rectangular pulses, each scaled to the appropriate value of x(t) at the corresponding t (which lies at the midpoint of the base of width Δ . This is called the staircase approximation of x(t). In the limit as the pulse-width ( Δ ) approaches zero, the rectangular pulse becomes finer in width and the function x(t)can be represented in terms of impulses by the following expression,
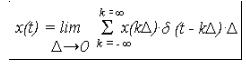
This summation is an approximation. As Δ approaches zero, the approximation increases in accuracy and when delta becomes infinitesimally small, this error becomes zero and the above summation is converted into the following integral expression.
For example, take x(t) = u(t)
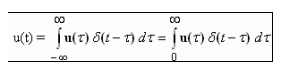
since u(t) = 0 for t < 0 and u(t) = 1 for t > 0. In complete analogy with the development on sampling property of discrete unit impulse we have,
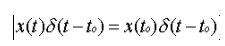
This is known as Sifting Property of the continuous time impulse. Note that the unit impulse puts unit area into zero width.
The Convolution Integral
We now want to find the response for an arbitrary continuous time signal as the superposition of scaled and shifted pulses just as we did for discrete time signal. For a continuous LSI system, let h(t) be the response to the unit impulse signal. Then,

by shift invariance,
by homogeneity,
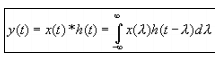
by additivity, ( Note : We can perform additivity on infinite terms only if the sum/integral converges. )

This is known as the continuous time convolution of x(t) and h(t). This gives the system response y(t) to the input x(t) in terms of unit impulse response h(t). The convolution of two signals h(t) and x(t) will be represented symbolically as
To explain this graphically,
Consider the following input which (as explained above) can be considered to be an approximation of a series of rectangular impulses. And it can be represented using the convolution sum as
Hence, by merely knowing the impulse response one can predict the response of the signal x(t) by using the given formula for convolution.

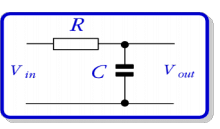
RC System
Consider a RC system consisting of a resistor and a capacitor. We have to find out what the response of this system is to the unit impulse 
First let us understand the response to
If the input is the unit step function u(t) then the output of the system will be .  Let us call this output of the system S(t). Hence we can say that the response to will be given as follows:
Let us call this output of the system S(t). Hence we can say that the response to will be given as follows:

Now as  the response of will be equal to h(t)
the response of will be equal to h(t)
Taking limit as  on both sides and using
on both sides and using 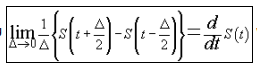

By the sifting property we get 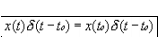
Hence if we are given the unit step responseu (t) we have been able to calculate the continuous impulse response of the system. Next we shall see how we can get the unit step response from the impulse response of the same system.
Impulse response of RC system
We have seen how we could calculate the impulse response from the unit step response of a system. Now we shall calculate the unit step response, or in general the response to any input signal, given its impulse response. We shall use convolution to obtain the required result
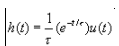
The unit impulse  , when fed into the RC system gives the corresponding impulse response h(t), which in this case is given by
, when fed into the RC system gives the corresponding impulse response h(t), which in this case is given by
We shall now find the response to the input signal u(t).
The convolution of an input signal x(t) and the impulse response of a system h(t) is given by the formula:
But in this case x(t) = u(t), and so the output signal y(t) will be given by :
Now we have  if and only if
if and only if  In all other cases
In all other cases
Hence the given equation for y(t) will now simplify to :

Solving which we get ,Solving which we get ,
which is the response to the unit step function.
Hence we have now shown how to calculate the impulse response given the unit step response and also any response given the impulse response. Moreover we can now say that given either the unit step response or the impulse response we can calculate the response to any other input signals.
Convolution Operation
We now interpret the convolution (x*h)(t) as the common (shaded) area enclosed under the curves x(v) and h(t-v) as v varies over the entire real axis.
x(v) is the given input function, with the independent variable now called v. h(t-v) is the impulse response obtained by inverting h(v) and then shifting it by t units on the v-axis.
As t increases clearly h(t-v) can be considered to be a train moving towards the right, and at each point on the v-axis, the area under the product x(v) and h(t-v) is the value of y(t) at that t.
Conclusion:
In this lecture you have learnt:
- The given input x(t) is approximated with narrow rectangular pulses, each scaled to the appropriate value of x(t) at the corresponding t (which lies at the midpoint of the base of width d). This is called the staircase approximation of x(t).
- By merely knowing the impulse response one can predict the response of the signal x(t) by using the given formula for convolution.
- If we are given unit-step response, we can calculate unit-impulse response by differentiating the unit-step response .
- If we are given unit-impulse response, we can calculate unit-step response by taking running integral of unit-impulse response .
- The convolution (x*h)(t) is the common (shaded) area enclosed under the curves x(v) and h(t-v)as v varies over the entire real axis.
- As t increases, h(t-v) can be considered to be a train moving towards the right and at each point on the v -axis the common area under the product x(v) and h(t-v) is the value of y(t) at that t.
|
41 videos|52 docs|33 tests
|
FAQs on Continuous Time LTI Systems - Signals and Systems - Electrical Engineering (EE)
| 1. What is a continuous-time LTI system? |  |
| 2. What are the properties of a continuous-time LTI system? | |
| 3. How are continuous-time LTI systems represented mathematically? | |
| 4. What are the advantages of studying continuous-time LTI systems? | |
| 5. How can one determine the stability of a continuous-time LTI system? | |

|
4.76/5 Rating |

|
Dec 31, 2024 Last updated |

|
Explore Courses for Electrical Engineering (EE) exam
|
|
shortcuts and tricks
,study material
,Important questions
,Exam
,Free
,mock tests for examination
,Continuous Time LTI Systems | Signals and Systems - Electrical Engineering (EE)
,Sample Paper
,Objective type Questions
,Semester Notes
,Extra Questions
,Viva Questions
,Continuous Time LTI Systems | Signals and Systems - Electrical Engineering (EE)
,Previous Year Questions with Solutions
,Summary
,practice quizzes
,past year papers
,video lectures
,MCQs
,ppt
,Continuous Time LTI Systems | Signals and Systems - Electrical Engineering (EE)
;






Continuous Time LTI Systems Free PDF Download
Importance of Continuous Time LTI Systems
Continuous Time LTI Systems Notes
Continuous Time LTI Systems Electrical Engineering (EE) Questions
Study Continuous Time LTI Systems on the App
|
© EduRev
|
Education Revolution
|



|




