Linear Shift Invariant Systems | Signals and Systems - Electrical Engineering (EE) PDF Download

Linear Shift-Invariant systems:
Linear Shift-Invariant systems, called LSI systems for short, form a very important class of practical systems, and hence are of interest to us. They are also referred to as Linear Time-Invariant systems, in case the independent variable for the input and output signals is time. Remember that linearity means that is y1(t) and y2(t) are responses of the system to signals x1(t) and x2(t) respectively, then the response to ax1(t) + bx2(t) is ay1(t) + by2(t).
Shift invariance implies that the response of the system to x1(t - t0) is given by y1(t - t0) for all values of t and t0. Linear systems are of interest to us for primarily two reasons: first, several real-life systems can be well approximated by linear systems. Second, linear systems come with several properties which make their analysis simple. Similarly, shift-invariant systems allow us to use simpler math to analyse the system. As we proceed with our analysis, we will point out cases where some results (which are rather intuitive) are valid for only LSI systems.
The unit impulse (discrete time):
How do we go on with studying the responses of systems to various signals? It would be great if we can study the response of the system to one (or a few) signal(s) and predict the responses to all signals. It turns out that LSI systems can in fact be treated in such manner. The signal whose response we study is the unit impulse signal. If we know the response of the system to the unit impulse (called, for obvious reasons, the unit impulse response), then the system is completely characterized - we can find the response of the system to all possible inputs. This follows rather intuitively in discrete signals, so let us begin our analysis with discrete signals. In discrete signals, the unit impulse is a signal which has zero values everywhere except at one point, where its values is 1. Typically, this point is taken to be the origin (n=0).
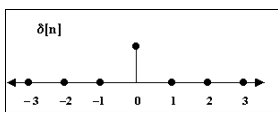
The unit impulse is denoted by the Greek letter delta . For example, the above impulses are denoted by δ[n] and δ[n-4] respectively.
Note: We are towards invoking shift invariance of the system here -
we have shifted the signal δ[n] by 4 units. We can thus use δ[n] to pick up a certain point from a discrete signal: suppose our signal x[n] is multiplied by δ[n -k] then the value 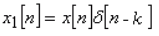 is zero at all point except n=k. At this point, the value of x1[k] equals the value x[k].
is zero at all point except n=k. At this point, the value of x1[k] equals the value x[k].
Now, we can express any discrete signal as a sum of several such terms:

This may seem redundant now, but later we shall find this notation useful when we take a look at convolutions etc. Here, we also want to introduce a convention for denoting discrete signals. For example, the signal x[n] and its representation are shown below :
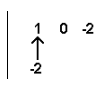
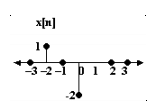
The number below the arrow shows the starting point of the time sequence, and the numbers above are the values of the dependent variable at successive instants from then onwards. We may not use this too much on the web site, but this turns out to be a convenient notation on paper.
The unit impulse response:
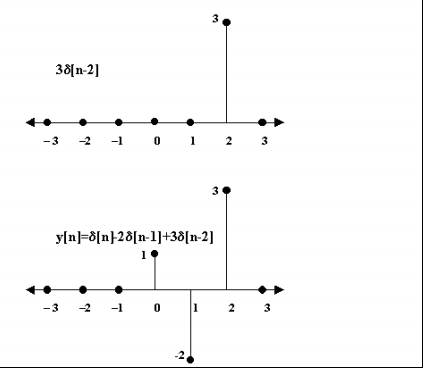
The response of a system to the unit impulse is of importance, for as we shall show below, it characterizes the LSI system completely. Let us consider the following system and calculate the unit step response to it: y[n] = x[n] - 2x[n-1] + 3x[n-2]. Now, we apply a unit step x[n]=d[n] to the system and calculate the response :
The graphical calculation and the response are as follows :
Arbitrary input signals:
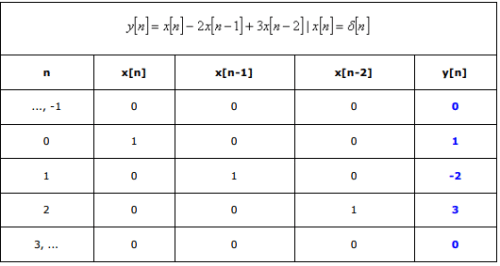
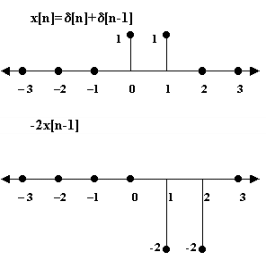
Now let us consider some other input, say x[0]=1, x[1]=1 and x=0 for n other than 0 and 1. What will be the response of the above LSI system to this input? We calculate the response in a table as below

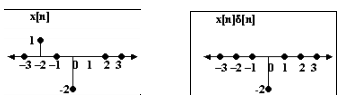
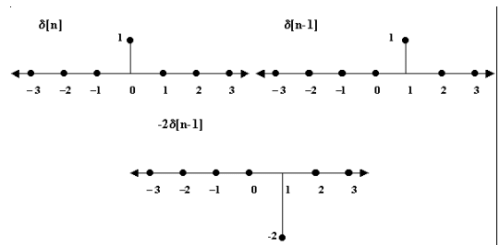
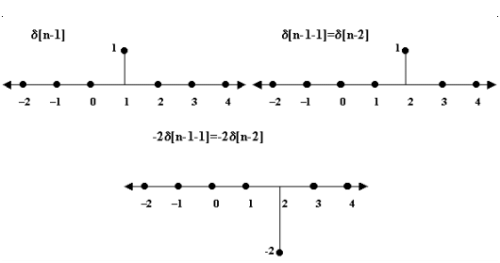
Ah! What we have actually done, is applied the additive (linear), homogenous (linear) and shift invariance properties of the system to get the output. First, we decomposed the input signal as a sum of known signals: first being the unit step  . The second signal is derived from the unit step by shifting it by 1. Thus, our input signal is as shown in the figure below. Then, we invoke the LSI properties of the system to get the responses to the individual signals: the first calculation is show above, while the calculation of response for is
. The second signal is derived from the unit step by shifting it by 1. Thus, our input signal is as shown in the figure below. Then, we invoke the LSI properties of the system to get the responses to the individual signals: the first calculation is show above, while the calculation of response for is  shown below
shown below
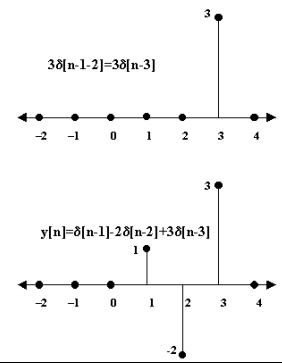
Finally, we add the two responses to get the response y[n] of the system to the input x[n]. The image below shows the final response with an alternative method of calculating it:
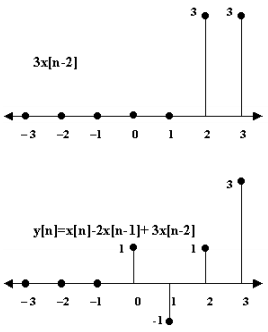
This brings us up to the concept of convolutions, covered in detail in a later section.
|
45 videos|70 docs|33 tests
|
FAQs on Linear Shift Invariant Systems - Signals and Systems - Electrical Engineering (EE)
| 1. What is a linear shift-invariant system? |  |
| 2. How does a linear shift-invariant system process signals? | |
| 3. What are the advantages of using linear shift-invariant systems in signal processing? | |
| 4. Can you give an example of a linear shift-invariant system? | |
| 5. How are linear shift-invariant systems relevant in real-world applications? | |



ppt
,past year papers
,practice quizzes
,Previous Year Questions with Solutions
,video lectures
,study material
,Linear Shift Invariant Systems | Signals and Systems - Electrical Engineering (EE)
,mock tests for examination
,Viva Questions
,Sample Paper
,Free
,Objective type Questions
,Important questions
,Linear Shift Invariant Systems | Signals and Systems - Electrical Engineering (EE)
,Linear Shift Invariant Systems | Signals and Systems - Electrical Engineering (EE)
,MCQs
,Summary
,Semester Notes
,shortcuts and tricks
,Extra Questions
,Exam
;






Linear Shift Invariant Systems Free PDF Download
Importance of Linear Shift Invariant Systems
Linear Shift Invariant Systems Notes
Linear Shift Invariant Systems Electrical Engineering (EE) Questions
Study Linear Shift Invariant Systems on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!