Properties of LTI System | Signals and Systems - Electrical Engineering (EE) PDF Download

Properties of LTI System
In the preceding chapters,we have already derived expressions for discrete as well as continuous time convolution operations.
We shall now discuss the important properties of convolution for LTI systems.
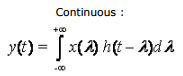
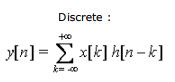
1) Commutative property : By the commutative property,the following equations hold true :
a) Discrete time:
Proof : We know that
Hence we make the following substitution (n - k = l )
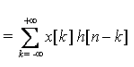
∴The above expression can be written as

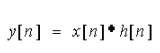
So it is clear from the derived expression that

Note :
1. 'n' remains constant during the convolution operation so 'n' remains constant in the substitution “n-k = l” even as 'k' and 'l' change.
2. “l” goes from - ∞ to + ∞ , this would not have been so had 'k' been bounded.( e.g :- 0 < k < 11 would make n < l < n – 11)
b) Continuous Time:

Proof:
We Know That
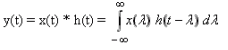
Making The Substitution t - λ = Ø Limits 
dt = - d λ
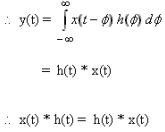
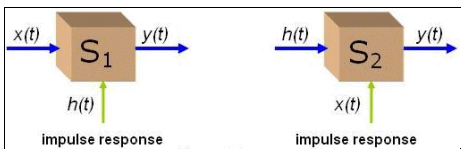
Thus we proved that convolution is commutative in both discrete and continuous variables.
Thus the following two systems : One with input signal x(t)and impulse response h(t) and the other with input signal h(t) and impulse response x(t) both give the same output y(t)
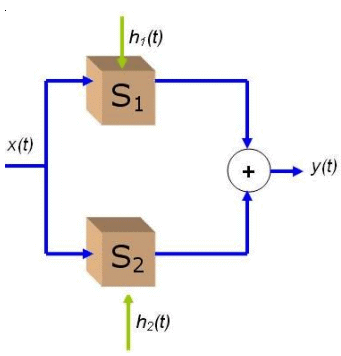
2) Distributive Property :
By this property we mean that convolution isdistributive over addition.
a) Discrete : 
b) Continuous : 
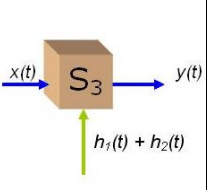
A parallel combination of LTI systems can be replaced by an equivalent LTI system which is described by the sum of the individual impulse responses in the parallel combination.
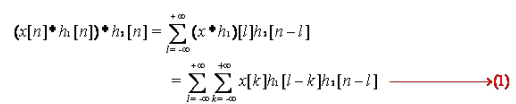
3) Associative property
a) Discrete time :

Proof : We know that
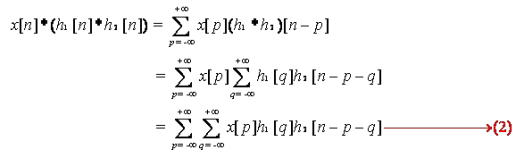
Making the substitutions: p = k ; q = (l - k) and comparing the two equations makes our proof complete.
Note: As k and l go -∞ from to +∞ independently of each other, so do p and q, however p depends on k, and q depends on l and k.
b) Continuous time :

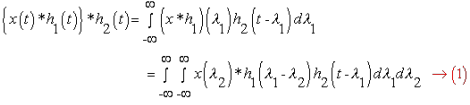
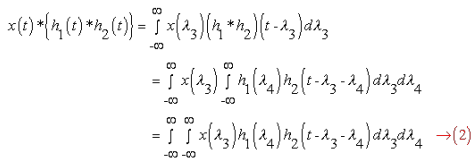
Lets substitute
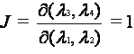
The Jacobian for the above transformation is

Doing some further algebra helps us see equation (2) transforming into equation (1) ,i.e. essentially they are the same. The limits are also the same. Thus the proof is complete.
Implications
This property (Associativity) makes the representation y[n] = x[n]*h[n] *g[n] unambiguous. From this property, we can conclude that the effective impulse response of acascaded LTI system is given by the convolution of their individual impulse responses.
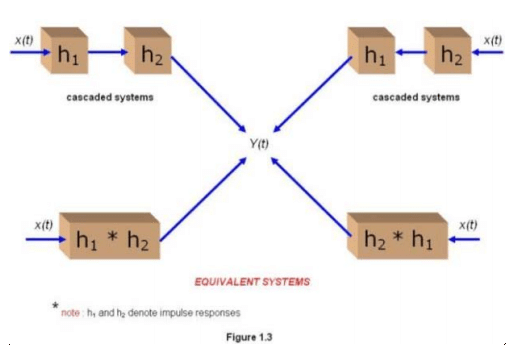
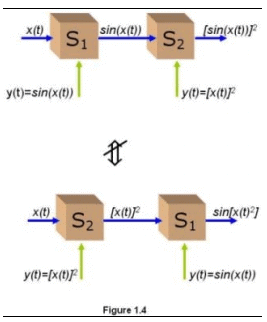
Consequently the unit impulse response of a cascaded LTI system is independent of the order in which the individual LTI systems are connected. Note :All the above three properties are certainly obeyed by LTI systemsbuthold for non-LTI systems in, as seen from the following example:
4) LTI systems and Memory
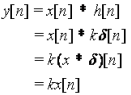
Recall that a system is memoryless if its output depends on the current input only. From the expression :
It is easily seen that y[n] depends only on x[n] if and only if 
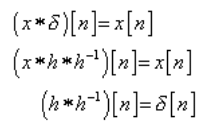
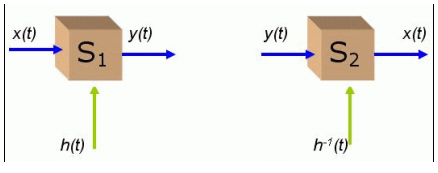
5) Invertibility :
A system is said to be invertible if there exists an inverse system which when connected in series with the original system produces an output identical to the input.
We know that
6) Causality :
a) Discrete time :

In order for a discrete LTI system to be causal, y[n] must not depend on x[k] for k > n. For this to be true h[n-k]'s corresponding to the x[k]'s for k > n must be zero. This then requires the impulse response of a causal discrete time LTI system satisfy the following conditions :

Essentially the system output depends only on the past and the present values of the input.
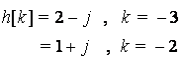
Proof : ( By contradiction )
Let in particular h[k] is not equal to 0, for some k<0

So we need to prove that for all x[n] = 0, n < 0, y[0] = 0
Now we take a signal defined as
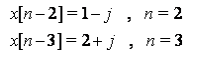
This signal is zero elsewhere. Therefore we get the following result :
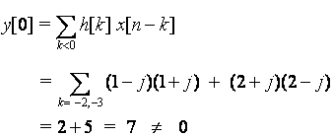
We have come to the result that y[0] ≠ 0, for the above assumption. ∴ our assumption stands void. So we conclude that y[n] cannot be independent of x[k] unless h[k] = 0 for k < 0
Note : Here we ensured a non-zero summation by choosing x[n-k]'s as conjugate of h[k]'s.
b) Continuous time :
In order for a continuous LTI system to be causal, y(t) must not depend on x(v) for v > t . For this to be true h(t-v)’s corresponding to the x(v)’s for v > t must be zero. This then requires the impulse response of a causal continuous time LTI system satisfy the following conditions :

As stated before in the discrete time analysis,the system output depends only on the past and the present values of the input.
Proof : ( By contradiction )
Suppose, there exists a > 0 such that h(-a)≠0
Now consider x(t) = δ(t-α)
Since,
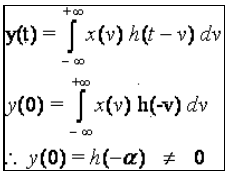
- System is not causal, a contradiction. Hence,

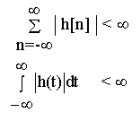
7) Stability :
A system is said to be stable if its impulse response satisfies the following criterion :
Theorem:
Stability 
Stability 
Proof of sufficiency:
Suppose 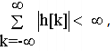
We have 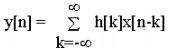
If x[n] is bounded i.e.

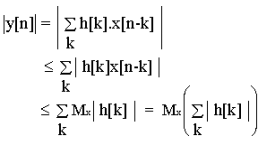
But as 
Proof of Necessity:
Take any n
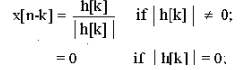
If | h[k] | = 0, then x[n-k] is bounded with bound 
Then, 
Hence  But since the system is stable
But since the system is stable which in turn implies that
which in turn implies that . Hence if y[n] is bounded then the condition must hold.
. Hence if y[n] is bounded then the condition must hold.
Hence Proved A similar proof follows in continuous time when you replace  by integral .
by integral .
|
45 videos|70 docs|33 tests
|
FAQs on Properties of LTI System - Signals and Systems - Electrical Engineering (EE)
| 1. What are the properties of an LTI system? |  |
| 2. How can we determine if a system is linear or not? | |
| 3. What is the significance of time-invariance in an LTI system? | |
| 4. How does causality affect the behavior of an LTI system? | |
| 5. Why is stability a desirable property in an LTI system? | |



Properties of LTI System | Signals and Systems - Electrical Engineering (EE)
,study material
,practice quizzes
,Free
,Exam
,mock tests for examination
,MCQs
,video lectures
,Objective type Questions
,Properties of LTI System | Signals and Systems - Electrical Engineering (EE)
,past year papers
,Semester Notes
,shortcuts and tricks
,Extra Questions
,Summary
,Previous Year Questions with Solutions
,Viva Questions
,ppt
,Properties of LTI System | Signals and Systems - Electrical Engineering (EE)
,Sample Paper
,Important questions
;


Properties of LTI System Free PDF Download
Importance of Properties of LTI System
Properties of LTI System Notes
Properties of LTI System Electrical Engineering (EE) Questions
Study Properties of LTI System on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!