Speed Control of DC Shunt Motors
(Refer Slide Time: 00:25)

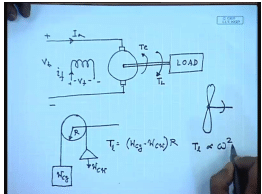
In a practical application, a DC shunt motor will be required to drive some load which is mechanically coupled to its shaft. So, the load will be coupled to a shaft. This load may be for example, an elevator where the shaft drives a pulley. On one side of the pulley there is the elevator cage, and another side of the pulley there is a counter weight. If the length of the radius of the pulley is R and the weight of the cage and counter weight are W c g and W c W respectively, then the torque exerted on the shaft is given by T equal to W c g minus W c W into r.
Now the speed, we will find that the torque exerted on the shaft is independent of the speed. So, if we draw this for the motor and the load, the motor is generating torque in this direction T E, and the load is exerting torque in this direction T L. This is the positive convention. So, if you draw the torque speed characteristics of the motor and the load.
(Refer Slide Time: 03:03)
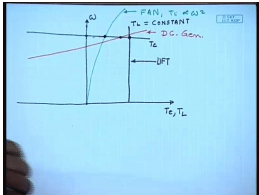
We have seen that the motor torque speed characteristic is a straight line. The load for this particular load this load torque is independent of speed; hence, it is a vertical line. This is T E; this is T L. At steady state if the load has to run at a constant speed T E must be equal to T L. Therefore, there is no net accelerating or decelerating torque; therefore, the steady state speed will be determined by the intersection of these two characteristics. Similarly, this load can also be a fan. We know for a fan type of load the load torque T L is proportional to the speed square to a first approximation. So, if we put this kind of a load torque, this is lift, T L equal to constant.
This is fan or pump, T L proportional to omega square or this load can also be another DC machine which operates as a generator. And we know that the load torque characteristics of a generator will be another straight line. In all cases, the steady state operating speed will be determined by the intersection of the load torque speed characteristics with that of the motor torque speed characteristics. The problem is no matter what the load torque characteristics is, we find that the speed at which the combination runs that is over a very narrow range. That is we cannot operate this machine at a very widely different speed. The purpose of speed control is to change the motor characteristics since the load characteristics is normally not under the control of the operator. So, it is necessary to change the motor torque speed characteristics, so that the machine can run at different speed. Let us see how this is possible.
(Refer Slide Time: 6:59)
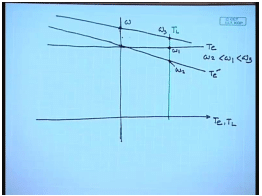
For example, let us consider the elevator load. This is the nominal motor torque speed characteristics. The elevator torque speed characteristics we have seen are a vertical straight line. Suppose, I want to reduce the speed, how we can do it? Since, nothing can be done about these characteristics if we let us say can increase the slope of the motor torque speed characteristics, and now it is given by T E dash. Then we find that the operating speed changes from omega 1 to omega 2 with omega 2 less than omega 1.
Similarly, if we can increase the no load speed; that is erases these characteristics we can increase the operating speed. So, the basics of speed control of a DC machine involve changing the torque speed characteristics of a DC machine. Let us see how we can do that. So, for that let us go back to the equation of the torque speed characteristics for a DC shunt motor.
(Refer Slide Time: 09:06)
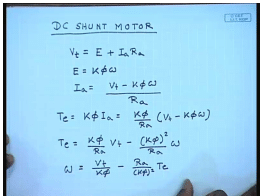
We know the terminal voltage V t equal to back E m f E plus I a R a where E equal to k phi omega. Therefore, I a equal to V t minus k phi omega divided by R a. Torque T e equal to k phi I a equal to k phi by R a into V t minus k phi omega, or T E equal to k phi by R a into V T minus k phi square by R a into omega, or omega equal to V T by k phi minus R a by k phi square into T e. So, this is the equation of the torque speed characteristics of a separately excited or shunt DC motor.
(Refer Slide Time: 11:25)
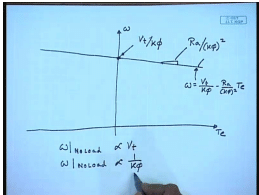
Now when we draw it, the intersection point with the vertical axis the y axis; equation of this line is omega equal to V t by k phi minus R a by k phi square T e. The intersection with y axis is given by V t by k phi, and the slope of this line is given by R a by k phi square. Therefore, you see that by changing the quantity k phi we can change the intersection point with the y axis as well as the slope of the y axis in the characteristics. This intersection point is actually the no load speed. So, no load speed this is proportional to V t, and it is also inversely proportional to k phi. So, if we want to change the characteristics one candidate will be this quantity k phi, in other word the field flux. This can be easily controlled by controlling the field current.
(Refer Slide Time: 13:40)
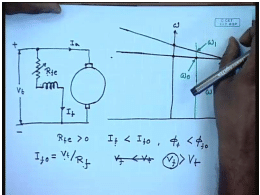
So, in order to control the field current, we insert an additional resistance in the field winding. The torque speed characteristics if you see, let us say say this is with additional field current field resistance with R f extra equal to 0. Now if we [FL]. So, suppose we have this DC machine and we had connected an additional resistance with the field winding with the value of the additional resistance equal to 0, this is the torque speed characteristics of the motor which you can call the nominal or natural torque speed characteristics.
Now if we insert some resistance, what will happen? The field current with R f e greater than 0, I f will be less than I f 0 which is the field current when no additional resistance is inserted. Hence, phi f will be less than phi f 0. As the no load speed is inversely proportional to the field flux, the no load speed will increase. But we have seen that the torque speed characteristics, the slope of the characteristics is also inversely proportional to phi square. Hence, not only the no load speed will change, the slope will also increase and the torque speed characteristics will be somewhat like this.
Now if we superimpose for example, the torque speed characteristics of the elevator, we find that if initially it was operating at a speed of omega 0; now it will operate at a speed of omega 1 where omega 1 will be greater than omega 0. Therefore, we have achieved our objective of changing the speed of the machine by inserting additional resistance in the field circuit. So, this is called the field control method of DC machine speed. This method although very simple has certain limitation; obviously, we can only reduce the field current. We cannot increase it, because the field winding will have its intrinsic resistance, and it will not be possible to increase the field current beyond the value given by V t by R f.
So, if it is a shunt machine connected across the same source as the armature, then the minimum field current that we will get is a V t by R f. So, in this method it is not possible to shift the characteristics below the nominal one. This problem can be avoided if the field winding is supplied from a separate source with voltage V f where V f is less than V t. However, even that is not very practical, because almost all DC machines are designed for a particular level of field flux.
And because of machine saturation it is not possible to use a field voltage which is larger than V t, so that the field current increases. When the field flux increases, therefore, the machine will be iron body of the machine will be saturated. What will happen is the field current will increase, but due to saturation field flux will not increase very appreciably. So, for all practical purpose by field control we can only reduce the field flux, and hence increase the speed of the machine but cannot decrease it. But there is also limitation on how much we can decrease the field winding.
(Refer Slide Time: 20:11)
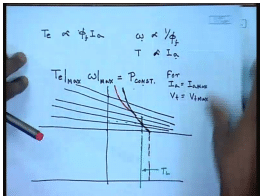
Please recall that torque is proportional to phi f I a. Therefore, in order to increase the speed, if omega is proportional to 1 by phi f, while torque is proportional to I a. So, in order to increase the speed if we reduce the field flux speed will increase, but for the same limit of the armature current the maximum torque that can be generated will decrease. In fact, this we have discussed in an earlier class, and we have seen that the maximum torque that can be generated and the product of the maximum torque and the maximum speed is equal to constant for I a equal to I a max and V t equal to V t max.
For a given armature voltage and current rating, the maximum mechanical power that can be developed by the machine is constant. Therefore, if we apply field control technique, it is possible to increase the motor speed, but the maximum torque that can be obtained gradually decreases. Hence, this is the limit within which the operating point must lie, and these are the different characteristics that we can get by field control. So, for example, if we use the same example of elevator load while this elevator load, this is the elevator torque speed characteristics.
We find that it is only up to this speed that the operating point stays within the limit beyond which the operating point goes out of the safe limit imposed by the maximum armature current, and hence, it is not advisable to operate at a speed higher than this. So, we find that for constant torque type of load, the region of speed control that we achieved is rather restricted. In fact, even the area shown by the maximum power curve cannot be fully utilized for very large speed, because in order to get a very high speed the field flux has to be considerably reduced, while the armature current will remain will be almost close to its rated value.
Therefore, the armature reaction effect will be very prominent. I will extremely distort the field flux wave form. Hence, the commutation will become a problem. Hence, in fact due to commutation even the constant power cannot be obtained at very high speed, and the operating region will become further restricted, possibly something like this. So, you see that although the control of field flux is a simple way of controlling the speed of a DC machine, we cannot reduce the machine speed using field control. The amount of increase that we can get is also limited by the consideration of maximum machine armature current and the commutation consideration.
(Refer Slide Time: 25:26)
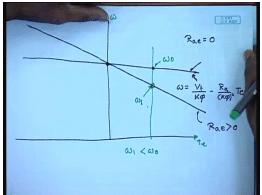
So, if we want to reduce the speed what are the options? Obviously, if we want to reduce the speed we will rather work at constant flux this constant rated flux, because reducing the flux has the effect of increasing speed; we do not want that. The simplest way to reduce the speed is to increase the armature resistance, for example, like this. So, let us say this is with no additional armature resistance, and this is with inserted additional armature resistance in series with the armature.
If we again consider the torque speed characteristics of the elevator, we will find that when no armature resistance is inserted the operating speed is omega 0; with inserted armature resistance the operating speed is omega 1 where omega 1 is less than omega 0, of course. So, we have achieved our objective of reducing the speed but at a price. What is the price? The price is reduced efficiency or increased power loss, let us see.
(Refer Slide Time: 27:45)
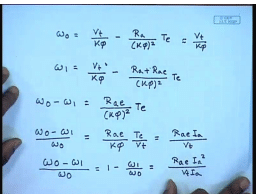
What will be the power loss? So, omega 0 equal to V t by k phi minus R a by k phi square T e and omega 1 equal to V t by k phi minus R a plus R a e by k phi square into T e. They are both serving the same load torque so the T e both characteristics are same. So, omega 0 minus omega 1 or omega 1 minus omega 0 minus omega 1 equal to into T e, so omega 0. Since the slope the R a is usually normally very small. So, omega 0 can be written approximately equal to. If we neglect R a it is approximately equal to V t by k phi. So, omega 0 minus omega 1 by omega 0 equal to R a e by k phi T e by V t but T e equal to k phi I a. So, this is R a e I a by V, t or omega 0 minus omega 1 by omega 0 equal to 1 minus omega 1 by omega 0 equal to R a e I a square by V t I a.
(Refer Slide Time: 31:36)
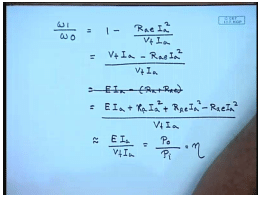
Or omega 1 by omega 0 equal to 1 minus R a e I a square by V t I a equal to V t I a minus R a e I a square by V t I a but V t equal to e I a minus R a plus R a e. Now if you neglect R a compared to R a e, this is approximately equal to E I a divided by V t I a. This is equal to output power of the machine by input power of the machine which is equal to the efficiency of the machine. So, you see that the power output of the DC machine decreases or the efficiency of the machine decreases as we try to decrease the speed of the machine by inserting armature resistance, although, this is a very simple method of controlling the speed.
(Refer Slide Time: 34:26)
We have seen that in a DC shunt machine the speed of the machine can be lowered by adding additional field armature resistance, while the speed can be increased by increasing additional field resistance. We have also seen that by adding additional field resistance we can only increase the speed of the machine but cannot decrease it, but by adding additional armature resistance we can decrease the speed, cannot increase it.
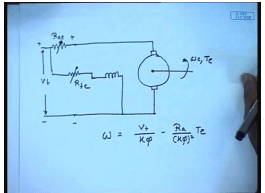
Moreover adding additional armature resistance tends to reduce the efficiency of the motor, because there will be additional power loss in the armature resistance. So, a better approach will be to change the armature voltage in a different manner. For example, the torque speed characteristics is given by omega equal to V t by k phi minus R a by k phi whole square into T e. One simple method of reducing the armature terminal voltage will be to use a potential divider.
(Refer Slide Time: 36:36)
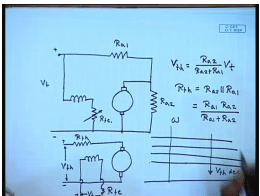
For example, instead of supplying the total armature voltage one can supply the armature from a potential divider. Now we can draw the thevenin equivalent circuit looking back from the armature terminal. This will appear as the armature with a, this is R t h, and this is V t h; obviously, V t h equal to R a 2 divided by R a 2 plus R a 1 into V t and R t h equal to R a 2 parallel R a 1. Now V t h this is equal to, by independently controlling R a 1 and R a 2 we can independently control V t h and R t h. The objective will be to keep R t h as small as possible, so that the machine operates at a high efficiency which means R a 1 should be small and V t h can be controlled by controlling R a 2.
So, for different combination the torque speed characteristics will now look like this different for with decreasing V t h. The objective will be to keep R t h as far as possible very low, so that the efficiency is high. So, these two methods of inserting additional armature resistance or using a potential divider arrangement are called armature resistance control method. They can be used to reduce the speed of the DC shunt motor but at the expense of additional loss. Even the potential divider method will involve some additional loss, because there will be continuously current flowing through R a 1 and R a 2 which will give rise to additional loss. So, the best approach will be to use a variable supply voltage for the armature with very low internal resistance.
(Refer Slide Time: 41:56)
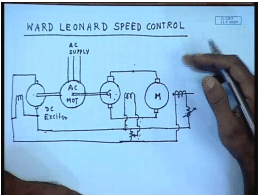
One such method was used previously which was called the Ward-Leonard speed control method which is a very versatile method. In fact, what is done is that the DC motor whose speed is to be controlled is supplied from a similarly rated slightly higher rated DC generator. This DC generator in turn is run from a fixed speed AC machine called an induction machine AC motor, 3 phase AC motor which operates at almost constant speed. This AC motor shaft, there is also what is called a excited generator mounted which is a DC generator of low power mounted on the shaft of the AC motor, which is basically a self excited DC generator and produces almost a constant voltage.
This DC supply is used to supply the field winding of the generator as well as the field winding of the motor. So, this is the Ward-Leonard method of speed control. The set works like this with the applied AC supply, the AC motor runs at almost constant speed which is coupled to an exciter generator. This is a DC exciter generator which is a DC shunt generator which produces almost constant voltage. Now this voltage excites the field winding of the generator through a potential divider. So, the terminal voltage of this generator can be smoothly and continuously controlled from 0 to its rated value in both directions.
By changing the field connection of this generator we can as well reverse the polarity of the voltage generated; therefore, the speed of the motor that is supplied from the generator can also be reversed. Please note that no additional starting resistance or anything else is required, because the generator voltage can be very smoothly increased from 0 and for a constant operating speed can be set at any desired level. So, for speed control of the armature speed control of the DC motor up to the rated no load speed of the motor, the field of the DC generator is controlled thereby controlling the magnitude of the applied voltage across the DC motor.
Please note that there is no additional resistance connected to the DC motor except the armature resistance of the generator which is of the same order as the armature resistance of the motor. So, this arrangement does not incur any large amount of additional loss and up to the rated no load speed, the speed of the drive motor can be controlled by controlling the field excitation of the supply generator. Above the no load speed if we want to run the DC motor, then the voltage of the supply generator is held constant at its maximum value; while the field of the motor under control is varied by controlling the field rheostat of the motor and speed higher than the base speed can be obtained.
(Refer Slide Time: 48:37)
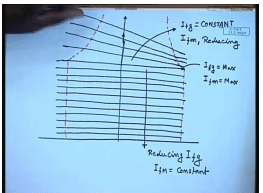
The torque speed characteristics of this system will be somewhat like this. This is the nominal torque speed characteristics up to the maximum current limit. This is achieved at I f of generator equal to maximum I f of motor is at its maximum. If we reduce the generator field current keeping the motor field current constant at its maximum value, we get a family of curves which are parallel to each other, because the effect of reducing the generator field current is to reduce the applied terminal voltage to the motor. And it is to be noticed that at all speed the maximum torque that can be generated by the motor remains constant, because its field excitation is maintained constant at its maximum value.
So, this k set of characteristics are obtained by reducing I f of the generator. If we want to get characteristics above the rated speed then we will held I f g constant at its maximum value and by reducing the field current of the motor. It should be remembered that even then the maximum torque that can be generated for the given limit of the machine, armature current keeps on reducing so that the available mechanical power is constant. So, this is the region over which this Ward-Leonard speed control system can work. These are for I f g equal to constant, f m reducing. So, we observe that the WardLeonard method of speed control can give a very widely varying range of torque speed characteristics of the DC motor under control.
So, now if we put the elevator torque speed characteristics on this, we see that if the machine ratings are chosen properly for any load torque we can get almost any desired operating speed of the set. Of course, up to certain limit by simply controlling either the field current of the DC generator or by the field current of the DC motor. In fact, it can be controlled to operate either as a motor or as a generator; please note that the torque speed characteristics of the elevator is given by R into W cage minus W counter weight. Now the relative values of W cage and W counter weight will be different for different mode of operation of the elevator.
For example, when the elevator is lifting people is full and lifting people; in that case W c g will be larger than W c W, and this will be possibly the torque speed characteristics. However, it may so happen that the elevator is going empty upwards; in that case W c g will be lower than W c W, and the torque speed characteristics will shift to the second quadrant. In which case the DC motor in the Ward-Leonard system which is driving the elevator now it will change its role and behave like a generator; the generator will now behave like a motor driving the AC machine which now will act as a generator and feed power back to the AC supply.
So, we see that even during breaking or slowing operation the energy can be saved and fed back to the AC supply, therefore, increasing the efficiency of the system. However, the Ward-Leonard system in spite of its many advantages is not preferred this test for several reasons. First of all it requires to control the speed of one motor it requires three additional machines, and the full power flows through at least three machine. So, the efficiency of the three machines or the losses of the three machines comes in. Hence, the final efficiency of the drive system becomes somewhat poor; therefore, in present date this system has mostly been replaced by solid state methods of controlling the armature voltage of the motor to be controlled which we will discuss in the future class.
Thank you.