
Best Study Material for Electrical Engineering (EE) Exam
Electrical Engineering (EE) Exam > Electrical Engineering (EE) Notes > Controlling force And Damping force
Controlling force And Damping force - Electrical Engineering (EE) PDF Download
Damping force
The deflection torque and controlling torque produced by systems are electro mechanical. Due to inertia produced by this system, the pointer oscillates about it final steady position before coming to rest. The time required to take the measurement is more. To damp out the oscillation is quickly, a damping force is necessary. This force is produced by different systems.
(a) Air friction damping
(b) Fluid friction damping
(c) Eddy current damping
Air friction damping
The piston is mechanically connected to a spindle through the connecting rod (Fig. 1.6). The pointer is fixed to the spindle moves over a calibrated dial. When the pointer oscillates in clockwise direction, the piston goes inside and the cylinder gets compressed. The air pushes the piston upwards and the pointer tends to move in anticlockwise direction.
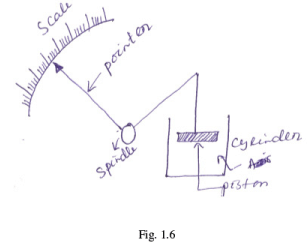
If the pointer oscillates in anticlockwise direction the piston moves away and the pressure of the air inside cylinder gets reduced. The external pressure is more than that of the internal pressure. Therefore the piston moves down wards. The pointer tends to move in clock wise direction.
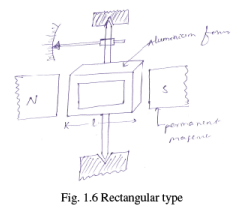
Eddy current damping
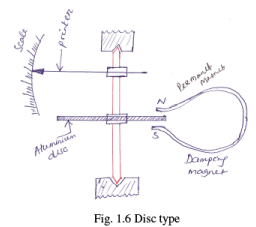
An aluminum circular disc is fixed to the spindle (Fig. 1.6). This disc is made to move in the magnetic field produced by a permanent magnet.
When the disc oscillates it cuts the magnetic flux produced by damping magnet. An emf is induced in the circular disc by faradays law. Eddy currents are established in the disc since it has several closed paths. By Lenz’s law, the current carrying disc produced a force in a direction opposite to oscillating force. The damping force can be varied by varying the projection of the magnet over the circular disc.
Controlling force
To make the measurement indicated by the pointer definite (constant) a force is necessary which will be acting in the opposite direction to the deflecting force. This force is known as controlling force. A system which produces this force is known as a controlled system. When the external signal to be measured by the instrument is removed, the pointer should return back to the zero position. This is possibly due to the controlling force and the pointer will be indicating a steady value when the deflecting torque is equal to controlling torque.

(1.1)
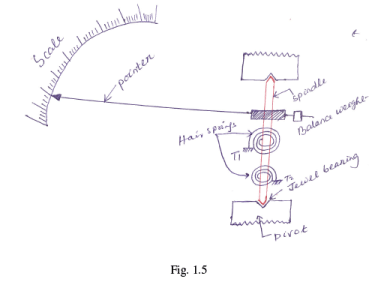
Spring control
Two springs are attached on either end of spindle (Fig. 1.5).The spindle is placed in jewelled bearing, so that the frictional force between the pivot and spindle will be minimum. Two springs are provided in opposite direction to compensate the temperature error. The spring is made of phosphorous bronze.
When a current is supply, the pointer deflects due to rotation of the spindle. While spindle is rotate, the spring attached with the spindle will oppose the movements of the pointer. The torque produced by the spring is directly proportional to the pointer deflectionθ .
TC ∝ θ
(1.2)
The deflecting torque produced Td proportional to ‘I’. When TC = Td , the pointer will come to a steady position. Therefore
θ ∝ I (1.3)
Since, θ and I are directly proportional to the scale of such instrument which uses spring controlled is uniform.
The document Controlling force And Damping force - Electrical Engineering (EE) is a part of Electrical Engineering (EE) category.
All you need of Electrical Engineering (EE) at this link: Electrical Engineering (EE)


FAQs on Controlling force And Damping force - Electrical Engineering (EE)
| 1. What is the difference between controlling force and damping force in electrical engineering? |  |
| 2. How do controlling forces affect the behavior of electrical systems? | |
Ans. Controlling forces play a crucial role in determining the behavior of electrical systems. By applying the appropriate controlling force, the system can be guided to operate in a desired manner, such as achieving stability, tracking a reference signal, or regulating a specific parameter.
| 3. What are some examples of controlling forces in electrical engineering? | |
Ans. Examples of controlling forces in electrical engineering include feedback control signals, such as voltage or current signals, that are used to regulate the operation of electronic devices, motors, or power systems. Other examples include control algorithms or techniques used in digital signal processing or automatic control systems.
| 4. How does damping force help in reducing oscillations in electrical systems? | |
Ans. Damping force acts as a resistance to the motion of a system, absorbing its energy and reducing oscillations or vibrations. In electrical systems, damping forces can be introduced through various means, such as adding resistive elements or using feedback control techniques to dissipate energy and stabilize the system.
| 5. What are the consequences of inadequate damping forces in electrical systems? | |
Ans. Inadequate damping forces can lead to undesirable consequences in electrical systems. It can cause excessive oscillations, instability, or even damage to the system components due to resonance effects. Therefore, it is important to carefully design and implement damping forces to ensure proper system behavior and reliability.
Related Exams
About this Document

1.6K Views

4.90/5
Rating

Apr 26, 2025
Last updated
Document Description: Controlling force And Damping force for Electrical Engineering (EE) 2025 is part of Electrical Engineering (EE) preparation. The notes and questions for Controlling force And Damping force have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Controlling force And Damping force covers topics like and Controlling force And Damping force Example, for Electrical Engineering (EE) 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Controlling force And Damping force.
Introduction of Controlling force And Damping force in English is available as part of
our Electrical Engineering (EE) preparation & Controlling force And Damping force in Hindi for Electrical Engineering (EE)
courses. Download more important topics, notes, lectures and mock test series for Electrical Engineering (EE)
Exam by signing up for free. Electrical Engineering (EE): Controlling force And Damping force - Electrical Engineering (EE)
Description
Full syllabus notes, lecture & questions for Controlling force And Damping force - Electrical Engineering (EE) - Electrical Engineering (EE) | Plus excerises question with solution to help you revise complete syllabus | Best notes, free PDF download
Information about Controlling force And Damping force
In this doc you can find the meaning of Controlling force And Damping force defined & explained in the simplest way possible.
Besides explaining types of Controlling force And Damping force theory,
EduRev gives you an ample number of questions to practice Controlling force And Damping force tests, examples and also practice Electrical Engineering (EE) tests.
Download as PDF
Top Courses for Electrical Engineering (EE)

Related Searches
practice quizzes
,Previous Year Questions with Solutions
,Summary
,Semester Notes
,Important questions
,Controlling force And Damping force - Electrical Engineering (EE)
,ppt
,MCQs
,Objective type Questions
,Free
,study material
,mock tests for examination
,Controlling force And Damping force - Electrical Engineering (EE)
,Viva Questions
,shortcuts and tricks
,Sample Paper
,Extra Questions
,past year papers
,Controlling force And Damping force - Electrical Engineering (EE)
,video lectures
,Exam
;


Additional Information about Controlling force And Damping force for Electrical Engineering (EE) Preparation
Controlling force And Damping force Free PDF Download
The Controlling force And Damping force is an invaluable resource that delves deep into the core of the Electrical Engineering (EE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Controlling force And Damping force now and kickstart your journey towards success in the Electrical Engineering (EE) exam.
Importance of Controlling force And Damping force
The importance of Controlling force And Damping force cannot be overstated, especially for Electrical Engineering (EE) aspirants.
This document holds the key to success in the Electrical Engineering (EE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Controlling force And Damping force Notes
Controlling force And Damping force Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Controlling force And Damping force.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Controlling force And Damping force Notes on EduRev are your ultimate resource for success.
Controlling force And Damping force Electrical Engineering (EE) Questions
The "Controlling force And Damping force Electrical Engineering (EE) Questions" guide is a valuable resource for all aspiring students preparing for the
Electrical Engineering (EE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Controlling force And Damping force on the App
Students of Electrical Engineering (EE) can study Controlling force And Damping force alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Controlling force And Damping force,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Controlling force And Damping force is prepared as per the latest Electrical Engineering (EE) syllabus.
|
© EduRev
|
Education Revolution
|



|






Signup on EduRev and stay on top of your study goals
10M+ students crushing their study goals daily