Lecture 18 - Bode Plot - Electrical Engineering (EE) PDF Download

Lecture 18 - Bode Plot, Control Systems
1 Bode Plot
Bode plot is the graphical tool for drawing the frequency response of a system.
It is represented by two separate plots, one is the magnitude vs frequency and the other one is phase vs frequency.The magnitude is expressed in dB and the frequency is generally plotted in log scale.
One of the advantages of the Bode plot in s-domain is that the magnitude curve can be approximated by straight lines which allows the sketching of the magnitude plot without exact computation.
This feature is lost when we plot Bode diagram in z-domain . To incorporate this feature we use bi-linear transformation to transform unit circle of the z-plane into the imaginary axis of another complex plane, w plane, where

From the power series expansion
For frequency domain analysis the above bi-linear transformation may be used to convert GH (z) to GH (w) and then construct the Bode plot.
Example 1: Let us consider a digital control system for which the loop transfer function is given by
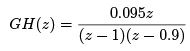
where sampling time T = 0.1 sec. Putting z = we get the transfer function in w plane as
we get the transfer function in w plane as

where ωw is the frequency in w plane. Corner frequencies are 1/1.0026 = 0.997 rad/sec and 1/0.05 = 20 rad/sec.
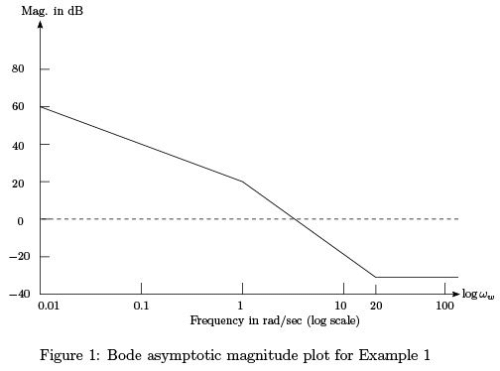
The straight line asymptotes of the Bode plot can be drawn using the following.
- Up to ωw = 0.997 rad/sec, the magnitude plot is a straight line with slope −20 dB/decade. At ωw = 0.01 rad/sec, the magnitude is 20 log10(10.02)−20 log10(0.01) = 60 dB.
- From ωw = 0.997 rad/sec to ωw = 20 rad/sec, the magnitude plot is a straight line with slope −20 − 20 = −40 dB/decade.
- Since both of the zeros will contribute same to the magnitude plot, after ωw = 20 rad/sec, the slope of the straight line will be −40 + 20 + 20 = 0dB/decade.
The asymptotic magnitude plot is shown in Figure 1.
One should remember that the actual plot will be slightly different from the asymptotic plot.
In the actual plot, errors due to straight line assumptions is compensated.
Phase plot is drawn by varying the frequency from 0.01 to 100 rad/sec at regular intervals. The phase angle contributed by one zero will be canceled by the other. Thus the phase will vary from −90o(270o) to −180o(180o).
Figure 2 shows the actual magnitude and phase plot as drawn in MATLAB.
Bode Diagram
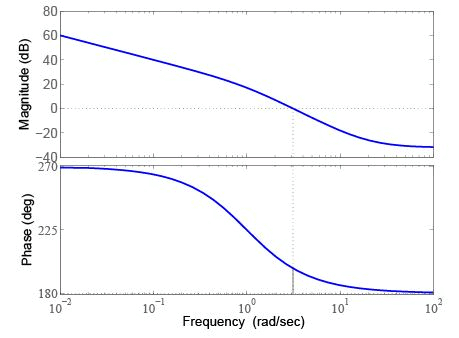
Figure 2: Bode magnitude and phase plot for Example 1
1.1 Gain margin and Phase margin
Gain margin and phase margins are the measures of relative stability of a system.
Similar to continuous time case, we have to first define phase and gain cross over frequencies before defining gain margin and phase margin.
Gain margin is the safety factor by which the open loop gain of a system can be increased before the system becomes unstable. It is measured as
where ωp is the phase crossover frequency which is defined as the frequency where the phase of the loop transfer function GH (eiωT ) is 180o .
Similarly Phase margin (PM) is defined as
P M = 180o + GH (eiωg T )
where ωg is the gain crossover frequency which is defined as the frequency where the loop gain magnitude of the system becomes one.
1.2 Compensator design using Bode plot
A compensator or controller is added to a system to improve its steady state as well as dynamic responses.
Nyquist plot is difficult to modify after introducing controller.
Instead Bode plot is used since two important design criteria, phase margin and gain crossover frequency are visible from the Bode plot along with gain margin.
Points to remember
- Low frequency asymptote of the magnitude curve is indicative of one of the error constants Kp, Kv , Ka depending on the system types.
- Specifications on the transient response can be translated into phase margin (PM), gain margin (GM), gain crossover frequency, bandwidth etc.
- Design using bode plot is simple and straight forward.
- Reconstruction of Bode plot is not a difficult task.
1.3 Phase lead, Phase lag and Lag-lead compensators
Phase lead, phase lag and lag-lead compensators are widely used in frequency domain design.
Before going into the details of the design procedure, we must remember the following.
- Phase lead compensation is used to improve stability margins. It increases system bandwidth thus improving the spread of the response.
- Phase lag compensation reduces the system gain at high frequencies with out reducing low frequency gain. Thus the total gain/low frequency gain can be increased which in turn will improve the steady state accuracy. High frequency noise can also be attenuated. But stability margin and bandwidth reduce.
- Using a lag lead compensator, where a lag compensator is cascaded with a lead compensator, both steady state and transient responses can be improved.
Bi-linear transformation transfers the loop transfer function in z -plane to w-plane.
Since qualitatively w-plane is similar to s-plane, design technique used in s-plane can be employed to design a controller in w-plane.
Once the design is done in w-plane, controller in z-plane can be determined by using the inverse transformation from w-plane to z -plane.
In the next two lectures we will discuss compensator design in s-plane and solve examples to design digital controllers using the same concept.
FAQs on Lecture 18 - Bode Plot - Electrical Engineering (EE)
| 1. What is a Bode plot? |  |
| 2. How is a Bode plot useful in control systems? | |
| 3. How do you interpret the magnitude plot in a Bode plot? | |
| 4. What does the phase plot in a Bode plot indicate? | |
| 5. How can Bode plots be used in designing control systems? | |


Top Courses for Electrical Engineering (EE)

Semester Notes
,Viva Questions
,Lecture 18 - Bode Plot - Electrical Engineering (EE)
,MCQs
,mock tests for examination
,Objective type Questions
,Previous Year Questions with Solutions
,Summary
,Extra Questions
,study material
,ppt
,shortcuts and tricks
,Sample Paper
,practice quizzes
,video lectures
,Lecture 18 - Bode Plot - Electrical Engineering (EE)
,Exam
,Free
,Important questions
,Lecture 18 - Bode Plot - Electrical Engineering (EE)
,past year papers
;






Lecture 18 - Bode Plot Free PDF Download
Importance of Lecture 18 - Bode Plot
Lecture 18 - Bode Plot Notes
Lecture 18 - Bode Plot Electrical Engineering (EE) Questions
Study Lecture 18 - Bode Plot on the App
|
© EduRev
|
Education Revolution
|



|






