
Best Study Material for Electrical Engineering (EE) Exam
Electrical Engineering (EE) Exam > Electrical Engineering (EE) Notes > Lecture 24 - Sampled Data Control Systems with Dead Beat Response
Lecture 24 - Sampled Data Control Systems with Dead Beat Response - Electrical Engineering (EE) PDF Download
Lecture 24 - Sampled data control systems with Dead beat response, Control Systems
1 Sampled data control systems with Dead beat response
In case of a continuous time controlled process, the output c(t) is a function of time t and the dead beat response design, based on cancellation of stable poles and zeros, may lead to inter sampling ripples in the output.
The reason behind this is since the process zeros are canceled by controller poles, the continuous dynamics are excited by the input and are not affected by feed back.
The strategy of designing dead beat response for a sampled data system with the process plant transfer function Gh0Gp(z ) having at least one zero is not to cancel the zeros, whether they are inside or outside the unit circle.
H.P Sirisena gave a mathematical formulation and analysis to dead beat response.
If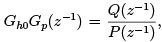 then according to Sirisena the digital controller for ripple free dead beat response to step input is
then according to Sirisena the digital controller for ripple free dead beat response to step input is
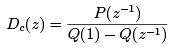
The design of ripple free dead beat response can still be done using similar approach as discussed in the previous chapters except for an added constraint which will increase the response time of the system.
Following example will illustrate the design procedure
Example 1:
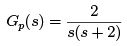
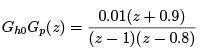
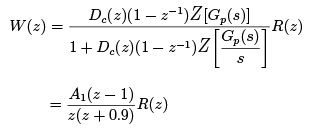
Let us consider a sampled data system as shown in Figure 1, where,
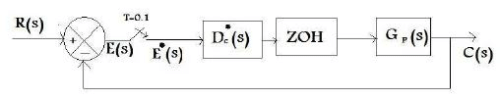
Figure 1: A sampled data control system
Thus
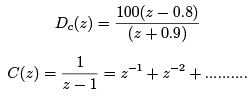
If we design Dc(z) without bothering about the inter sample ripples then
M (z) = z−1, 1 − M (z) = 1 − z−1
This implies that the output response is deadbeat only at sampling instants. However, the true output c(t) has inter sampling ripples which makes the system response as shown in Figure 2.
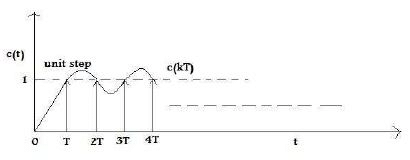
Figure 2: Rippled output response for Example 1
Thus the system takes forever to reach its steady state. The necessary and sufficient condition for c(t) to track a unit step input in finite time is
c(N T ) = 1 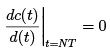
for finite N and all the higher derivatives should equal to zero. Let

Taking Z -transform,
where A1 is a constant. Unit step response of W (z ) will not go to zero in finite time since poles of  are not all at z = 0.
are not all at z = 0.
If we now apply the condition that zero of Gh0Gp(z) at z = −0.9 should not be canceled by Dc(z), then
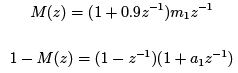
Solving
⇒ m1 = 0.53, a1 = 0.47
Thus
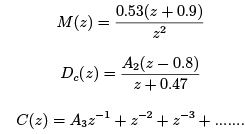
where A2 and A3 are constants. This implies that the dead beat response reaches the steady state after two sampling periods.
To show that the output response is indeed deadbeat, we derive the z-transform of w(t) as
W (z) = 2z−1
Thus c(t) will actually reach its steady state in two sampling periods with no inter sample ripples which is shown in Figure 3.
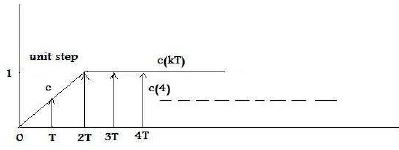
Figure 3: Ripple free deadbeat response for Example 1
Example 2: Consider the plant transfer function as

If we apply the condition that zeros of Gh0Gp(z) at z = −0.2 and z = −2.8 should not be canceled by Dc(z), then
While considering M (z) and 1 − M (z), following points should be kept in mind
1. M (z ) should contain all the zeros of Gh0Gp(z ).
2. The number of poles over zeros of M (z) should be at least equal to that of Gh0Gp(z) which is 2 in this case.
3. 1 − M (z) must include the term 1 − z−1.
4. The orders of M (z) and 1 − M (z) should be same and should equal the number of unknown coefficients.
Solving for the coefficients of M (z) and 1 − M (z), we get
1 − a1 = 0
m1 = a1 − a2
3m1 = a2 − a3
0.56m1 = a3
The solutions of the above are m1 = 0.219, a1 = 1, a2 = 0.781 and a3 = 0.123. The closed loop transfer function is
The transfer function of the digital controller is obtained as
The output for a unit step input is written as
Thus the output response c(kT ) reaches the steady state in 4 sampling instants. This is one more sampling instant than the previous example where we considered the plant to be all digital.
This implies that for sampled data control system, the dead beat response c(t) reaches the steady state after three sampling periods but inter sample ripples occur. After four sampling instants the inter sample ripples disappear.
To show that the output response is indeed deadbeat, we derive the z-transform of w(t) which will come out to be
W (z) = A1z−2 + A2z−3
where A1, A2 are constants.
Thus the derivative of c(t) is zero for kT ≥ 4T , which implies that the step response reaches the steady state in 4 sampling instants with no inter sample ripples, as shown in Figure 4.
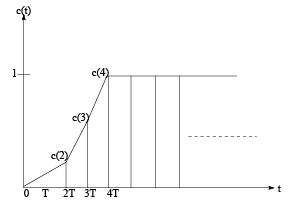
Figure 4: Ripple free deadbeat response for Example 2
The document Lecture 24 - Sampled Data Control Systems with Dead Beat Response - Electrical Engineering (EE) is a part of Electrical Engineering (EE) category.
All you need of Electrical Engineering (EE) at this link: Electrical Engineering (EE)

FAQs on Lecture 24 - Sampled Data Control Systems with Dead Beat Response - Electrical Engineering (EE)
| 1. What is a dead beat response in control systems? |  |
| 2. How is sampled data control different from continuous control systems? | |
Ans. Sampled data control systems operate on discrete-time samples of the system's output and input signals, while continuous control systems operate on continuous-time signals. Sampled data control systems are commonly used in digital control applications, where the continuous signals are converted into discrete samples using an analog-to-digital converter.
| 3. What are the advantages of using sampled data control systems? | |
Ans. Some advantages of using sampled data control systems include:
1. Digital implementation: Sampled data control systems can be easily implemented using digital hardware or software, making them more flexible and cost-effective compared to continuous control systems.
2. Robustness: Sampled data control systems can handle noise and disturbances more effectively than continuous control systems, as they can use digital filtering techniques to remove unwanted signals.
3. Easy integration: Sampled data control systems can be easily integrated with other digital systems, such as computer networks or data acquisition systems, allowing for seamless communication and data sharing.
| 4. How is dead beat response achieved in sampled data control systems? | |
Ans. Dead beat response in sampled data control systems can be achieved by using techniques such as pole placement or model predictive control. These techniques involve designing the controller in such a way that the system's response reaches the desired setpoint in the shortest possible time without any overshoot or oscillations.
| 5. What are some applications of sampled data control systems with dead beat response? | |
Ans. Sampled data control systems with dead beat response find applications in various industries, including:
1. Robotics: Dead beat response ensures precise control of robotic systems, allowing for accurate positioning and movement.
2. Power systems: Dead beat response can be used to regulate power flow and maintain stability in electrical grids.
3. Process control: Dead beat response is crucial in maintaining precise control over industrial processes, such as chemical reactions or temperature control in manufacturing plants.
About this Document

4.80/5
Rating

Mar 24, 2025
Last updated
Document Description: Lecture 24 - Sampled Data Control Systems with Dead Beat Response for Electrical Engineering (EE) 2025 is part of Electrical Engineering (EE) preparation. The notes and questions for Lecture 24 - Sampled Data Control Systems with Dead Beat Response have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Lecture 24 - Sampled Data Control Systems with Dead Beat Response covers topics like and Lecture 24 - Sampled Data Control Systems with Dead Beat Response Example, for Electrical Engineering (EE) 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Lecture 24 - Sampled Data Control Systems with Dead Beat Response.
Introduction of Lecture 24 - Sampled Data Control Systems with Dead Beat Response in English is available as part of
our Electrical Engineering (EE) preparation & Lecture 24 - Sampled Data Control Systems with Dead Beat Response in Hindi for Electrical Engineering (EE)
courses. Download more important topics, notes, lectures and mock test series for Electrical Engineering (EE)
Exam by signing up for free. Electrical Engineering (EE): Lecture 24 - Sampled Data Control Systems with Dead Beat Response - Electrical Engineering (EE)
Description
Full syllabus notes, lecture & questions for Lecture 24 - Sampled Data Control Systems with Dead Beat Response - Electrical Engineering (EE) - Electrical Engineering (EE) | Plus excerises question with solution to help you revise complete syllabus | Best notes, free PDF download
Information about Lecture 24 - Sampled Data Control Systems with Dead Beat Response
In this doc you can find the meaning of Lecture 24 - Sampled Data Control Systems with Dead Beat Response defined & explained in the simplest way possible.
Besides explaining types of Lecture 24 - Sampled Data Control Systems with Dead Beat Response theory,
EduRev gives you an ample number of questions to practice Lecture 24 - Sampled Data Control Systems with Dead Beat Response tests, examples and also practice Electrical Engineering (EE) tests.
Download as PDF
Top Courses for Electrical Engineering (EE)

Related Searches
MCQs
,Objective type Questions
,study material
,Viva Questions
,Important questions
,Extra Questions
,Free
,Exam
,Sample Paper
,mock tests for examination
,Lecture 24 - Sampled Data Control Systems with Dead Beat Response - Electrical Engineering (EE)
,shortcuts and tricks
,ppt
,past year papers
,Lecture 24 - Sampled Data Control Systems with Dead Beat Response - Electrical Engineering (EE)
,Semester Notes
,Lecture 24 - Sampled Data Control Systems with Dead Beat Response - Electrical Engineering (EE)
,practice quizzes
,Previous Year Questions with Solutions
,video lectures
,Summary
;


Additional Information about Lecture 24 - Sampled Data Control Systems with Dead Beat Response for Electrical Engineering (EE) Preparation
Lecture 24 - Sampled Data Control Systems with Dead Beat Response Free PDF Download
The Lecture 24 - Sampled Data Control Systems with Dead Beat Response is an invaluable resource that delves deep into the core of the Electrical Engineering (EE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Lecture 24 - Sampled Data Control Systems with Dead Beat Response now and kickstart your journey towards success in the Electrical Engineering (EE) exam.
Importance of Lecture 24 - Sampled Data Control Systems with Dead Beat Response
The importance of Lecture 24 - Sampled Data Control Systems with Dead Beat Response cannot be overstated, especially for Electrical Engineering (EE) aspirants.
This document holds the key to success in the Electrical Engineering (EE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Lecture 24 - Sampled Data Control Systems with Dead Beat Response Notes
Lecture 24 - Sampled Data Control Systems with Dead Beat Response Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Lecture 24 - Sampled Data Control Systems with Dead Beat Response.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Lecture 24 - Sampled Data Control Systems with Dead Beat Response Notes on EduRev are your ultimate resource for success.
Lecture 24 - Sampled Data Control Systems with Dead Beat Response Electrical Engineering (EE) Questions
The "Lecture 24 - Sampled Data Control Systems with Dead Beat Response Electrical Engineering (EE) Questions" guide is a valuable resource for all aspiring students preparing for the
Electrical Engineering (EE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Lecture 24 - Sampled Data Control Systems with Dead Beat Response on the App
Students of Electrical Engineering (EE) can study Lecture 24 - Sampled Data Control Systems with Dead Beat Response alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Lecture 24 - Sampled Data Control Systems with Dead Beat Response,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Lecture 24 - Sampled Data Control Systems with Dead Beat Response is prepared as per the latest Electrical Engineering (EE) syllabus.
|
© EduRev
|
Education Revolution
|



|







Signup on EduRev and stay on top of your study goals
10M+ students crushing their study goals daily