Linear Ordinary Differential Equations of First and Second Order - 4 | Physics for IIT JAM, UGC - NET, CSIR NET PDF Download

Second Order Linear Equations
The general form of these equations is
a2(t)y′′ + a1 (t)y′ + a0(t)y = b(t),
where

If b(t) ≡ 0, we call it homogeneous. Otherwise, it is called non-homogeneous.
Homogeneous equations with constant coefficients
This is the simplest case: a2, a1 , a0 are all constants, and g = 0. Let’s write:

We start with an example.
Example 1. Solve y′′ − y = 0, (we have here a2 = 1, a1 = 0, a0 = 1).
Answer. Let’s guess an answer of the form y1(t) = et .
Check to see if it satisfies the equation: y′′ = et , so y′′ − y = et − et = 0. So it is a solution.
Guess another function: y2(t) = e−t .
Check: y′ = −e−t , so y′′ = e−t, so y′′ − y = et − et = 0.
So it is also a solution.
Claim: Another function y = c1 y1 + c2 y2 for any arbitrary constants c1 , c2 (this is called “a linear combination of y1, y2 ”) is also a solution.
Check if this claim is true:
y(t) = c1et + c2 e−t ,
then

Actually this claim is a general property. It is called the principle of superposition.
Theorem (The Principle of Superposition) Let y1(t) and y2(t) be solutions of

Then, y = c1 y1 + c2 y2 for any constants c1 , c2 is also a solution.
Proof: If y1 solves the equation, then
 (I)
(I)
 (II)
(II)
Multiple (I) by c1 and (II) by c2, and add them up:

therefore y is also a solution to the equation.
How to find the solutions of
a2 y′′ + a1y′ + a0y = 0?
We seek solutions in the form y(t) = ert. Find r.
Since y ≠ 0, we get
a2r2 + a1r + a0 = 0
This is called the characteristic equation.
Conclusion: If r is a root of the characteristic equation, then y = ert is a solution.
If there are two real and distinct roots r1 ≠ r2 , then the general solution is y(t) =  where c1 , c2 are two arbitrary constants to be determined by initial conditions (ICs).
where c1 , c2 are two arbitrary constants to be determined by initial conditions (ICs).
Example 2. Consider y′′ − 5y′ + 6y = 0.
(a). Find the general solution.
(b). If ICs are given as: y(0) = −1, y′ (0) = 5, find the solution.
(c). What happens to y(t) when t → ∞?
Answer.(a). The characteristic equation is: r2 − 5r + 6 =, so (r − 2)(r − 3) = 0, two roots: r1 = 2, r2 = 3.
General solution is:

Solve these two equations for c1, c2 : Plug in c2 = −1 − c1 into the second equation, we get 2c1 + 3(−1 − c1 ) = 5, so c1 = −8. Then c2 = 7. The solution is
(c). We see that y(t) = e2t · (−8 + 7et ), and both terms in the product go to infinity as t grows. So y → +∞ as t → +∞.
Example 3. Find the solution for 2y′′ + y′ − y = 0, with initial conditions y(1) = 0, y′(1) = 3.
Answer.Characteristic equation:

.General solution is:
The ICs give

(A)+(B) gives
Plug this in (A):

The solution is

and as t → ∞ we have y → ∞.
Example 4. Consider the equation y′′ − 5y = 0. (a).
Find the general solution.
(b). If the initial conditions are given as y(0) = 1 and y′(0) = a, then, for what values of a would y remain bounded as t → +∞?
Answer.(a). Characteristic equation

General solution is


Example 5. Consider the equation 2y′′ + 3y′ = 0. The characteristic equation is

The general solutions is

As t → ∞, the first term in y vanished, and we have y → c2 .
Example 6. Find a 2nd order equation such that c1 e3t + c2e−t is its general solution.
Answer. From the form of the general solution, we see the two roots are r1 = 3, r2 = −1.
The characteristic equation could be (r − 3)(r + 1) = 0, or this equation multiplied by any non-zero constant. So r2 − 2r − 3 = 0, which gives us the equation
y′′ − 2y′ − 3y = 0.
Solutions of Linear Homogeneous Equations; the Wronskian
We consider some theoretical aspects of the solutions to a general 2nd order linear equations.
Theorem . (Existence and Uniqueness Theorem) Consider the initial value problem

If p(t), q(t) and g(t) are continuous and bounded on an open interval I containing t0, then there exists exactly one solution y(t) of this equation, valid on I .
Example 1. Given the equation

Find the largest interval where solution is valid.
Answer. Rewrite the equation into the proper form:

so we have

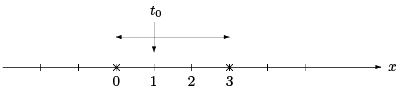
We see that we must have t ≠ 0 and t ≠ 3. Since t0 = 1, then the largest interval is I = (0, 3), or 0 < t < 3. See the figure below.
Definition. Given two functions f (t), g(t), the Wronskian is defined as
W (f, g)(t) =˙ f g′ − f ′g.
Remark: One way to remember this definition could be using the determinant of a 2 × 2 matrix,
Main property of the Wronskian:
- If W (f , g) ≡ 0, then f and g are linearly dependent.
- Otherwise, they are linearly independent.
Example 2. Check if the given pair of functions are linearly dependent or not.
(a). f = et , g = e−t .
Answer.We have

so they are linearly independent. (b). f (t) = sin t, g(t) = cos t.
Answer. We have
W (f , g) = sin t(sin t) − cos t cos t = −1 = 0
and they are linearly independent. (c). f (t) = t + 1, g(t) = 4t + 4.
Answer.We have W (f , g) = (t + 1)4 − (4t + 4) = 0
so they are linearly dependent. (In fact, we have g(t) = 4 · f (t).)
(d). f (t) = 2t, g(t) = |t|.
Answer. Note that g′ (t) = sign(t) where sign is the sign function. So
W (f , g) = 2t · sign(t) − 2|t| = 0
(we used t · sign(t) = |t|). So they are linearly dependent.
Theorem . Suppose y1(t), y2 (t) are two solutions of y′′ + p(t)y′ + q(t)y = 0.
Then
(I) We have either W (y1, y2 ) ≡ 0 or W (y1, y2) never zero;
II) If W (y1, y2) = 0, the y = c1 y1 + c2y2 is the general solution. They are also cal led to form a fundamental set of solutions. As a consequence, for any ICs y(t0) = y0,  there is a unique set of (c1 , c2 ) that gives a unique solution.
there is a unique set of (c1 , c2 ) that gives a unique solution.
The next Theorem is probably the most important one.
Theorem (Abel’s Theorem) Let y1, y2 be two (linearly independent) solutions to
y′′ + p(t)y′ + q(t)y = 0
on an open interval I . Then, the Wronskian W (y1, y2) on I is given by

for some constant C depending on y1, y2, but independent on t or on I .
Example 3. Given
t2 y′′ − t(t + 2)y′ + (t + 2)y = 0.
Find W (y1, y2) without solving the equation.
Answer.We first find the p(t)

which is valid for t ≠ 0. By Abel’s Theorem, we have

NB! The solutions are defined on either (0, ∞) or (−∞, 0), depending on t0.
From now on, when we say two solutions y1, y2 of the solution, we mean two linearly independent solutions that can form a fundamental set of solutions.
Example 4. If y1, y2 are two solutions of
ty′′ + 2y′ + tet y = 0,
and W (y1, y2)(1) = 2, find W (y1, y2 )(5).
Answer. First we find that p(t) = 2/t. By Abel’s Theorem we have

If W (y1, y2)(1) = 2, then C = 2. So we have
Example 5. If W (f , g) = 3e4t , and f = e2t , find g.
Answer.By definition of the Wronskian, we have
W (f , g) = f g′ − f ′g = e2t g′ − 2e2t g = 3e4t ,
which gives a 1st order equation for g:
g′ − 2g = 3e2t .
Solve it for g, by method of integrating factor :

We can choose c = 0, and get g(t) = 3te2t .
Next example shows how Abel’s Theorem can be used to solve 2nd order differential equations.
Example 6. Consider the equation y′′ + 2y′ + y = 0. Find the general solution.
Answer.The characteristic equation is r2 + 2r + 1 = 0, which given double roots r1 = r2 = −1. So we know that y1 = e−t is a solutions. How can we find another solution y2 that’s linearly independent?
By Abel’s Theorem, we have

and we can choose C = 1 and get W (y1, y2) = e−2t . By the definition of the Wronskian, we have

These two computation must have the same answer, so

This is a 1st order equation for y2. Solve it:

Choosing c = 0, we get y2 = tet . The general solution is

This is called the method of reduction of order.
Complex Roots
Example : Consider the equation y′′ + y = 0, find the general solution.
Answer. By inspection, we need to find a function such that y′′ = −y. We see that y1 = cos t and y2 = sin t both work. By the Wronskian W (y1, y2 ) = −2 ≠ 0, we see that these two solutions are linearly independent.
Therefore, the general solution is
y(t) = c1 y1 + c2 y2 = c1 cos t + c2 sin t.
Let’ try to connect this with the characteristics equation:
r2 + 1 = 0, r2 = −1, r1 = i, r2 = −i.
The roots are complex. In fact, they are acomplex conjugate pair. We see that the imaginary part seems to give sin and cos functions.
In general, the roots of the characteristic equation can be complex numbers. Consider the equation

The two roots are
If b2 − 4ac < 0, the root are complex, i.e., a pair of complex conjugate numbers. We will write r1,2 = λ ± iµ. There are two solutions:

To deal with exponential function with pure imaginary exponent, we need the Euler’s Formula:

Back to y1, y2 , we have

But these solutions are complex-valued. We want real-valued solutions! To achieve this, we use the Principle of Superposition. If y1, y2 are two solutions, then c1 y1 + c2 y2 is also a solution for any constants c1 , c2 . In particular, the functions  are also solutions.
are also solutions.
Write

We need to make sure that they are linearly independent. We can check the Wronskian,
 (home work problem).
(home work problem).
So y1, y2 are linearly independent, and we have the general solution

Example 1. (Perfect Oscillation: Simple harmonic motion.) Solve the initial value problem

Answer.The characteristic equation is

The general solution is
y(t) = c1 cos 2t + c2 sin 2t.
Find c1 , c2 by initial conditions: since y′ = −2c1 sin 2t + 2c2 cos 2t, we have
Solve these two equations, we get  So the solution is
So the solution is
which is a periodic oscillation. This is also called perfect oscillation or simple harmonic motion.
Example 2. (Decaying oscillation.) Find the solution to the IVP (Initial Value Problem)
y′′ + 2y′ + 101y = 0, y(0) = 1, y′(0) = 0.
Answer.The characteristic equation is
r2 + 2r + 101 = 0, ⇒ r1,2 = −1 ± 10i, ⇒ λ = −1, µ = 10.
So the general solution is
y(t) = e−t(c1 cos 10t + c2 sin 10t),
so

Fit in the ICs:

Solution is
y(t) = e−t (cos t + 0.1 sin t).
The graph is given below:
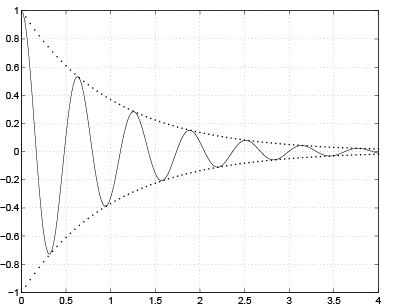
We see it is a decaying oscillation. The sin and cos part gives the oscillation, and the e−t part gives the decaying amplitude. As t → ∞, we have y → 0.
Example 3. (Growing oscillation) Find the general solution of y′′ − y′ + 81.25y = 0.
Answer. r2 − r + 81.25 = 0, ⇒ r = 0.5 ± 9i, ⇒ λ = 0.5, µ = 2.
The general solution is y(t) = e0.5t (c1 cos 9t + c2 sin 9t).
A typical graph of the solution looks like:
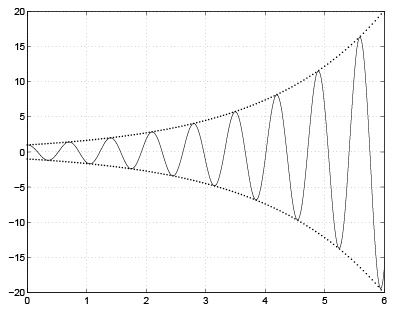
We see that y oscillate with growing amplitude as t grows. In the limit when t → ∞, y oscillates between −∞ and +∞.
Conclusion: Sign of λ, the real part of the complex roots, decides the type of oscillation:
- λ = 0: perfect oscillation;
- λ < 0: decaying oscillation;
- λ > 0: growing oscillation.
We note that since λ = \(-b \over 2a\) , so the sign of λ follows the sign of −b/a.
FAQs on Linear Ordinary Differential Equations of First and Second Order - 4 - Physics for IIT JAM, UGC - NET, CSIR NET
| 1. What is a linear ordinary differential equation? |  |
| 2. How is the order of a differential equation determined? | |
| 3. What is the difference between first order and second order differential equations? | |
| 4. How are linear ordinary differential equations used in physics? | |
| 5. Can linear ordinary differential equations have non-constant coefficients? | |



Extra Questions
,UGC - NET
,video lectures
,shortcuts and tricks
,Semester Notes
,UGC - NET
,CSIR NET
,CSIR NET
,past year papers
,Free
,Linear Ordinary Differential Equations of First and Second Order - 4 | Physics for IIT JAM
,Linear Ordinary Differential Equations of First and Second Order - 4 | Physics for IIT JAM
,Linear Ordinary Differential Equations of First and Second Order - 4 | Physics for IIT JAM
,study material
,CSIR NET
,Previous Year Questions with Solutions
,Important questions
,MCQs
,Objective type Questions
,practice quizzes
,Viva Questions
,ppt
,mock tests for examination
,Exam
,UGC - NET
,Sample Paper
,Summary
;


Linear Ordinary Differential Equations of First and Second Order - 4 Free PDF Download
Importance of Linear Ordinary Differential Equations of First and Second Order - 4
Linear Ordinary Differential Equations of First and Second Order - 4 Notes
Linear Ordinary Differential Equations of First and Second Order - 4 Physics Questions
Study Linear Ordinary Differential Equations of First and Second Order - 4 on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!