
Best Study Material for Mathematics Exam
Mathematics Exam > Mathematics Notes > Mathematics for IIT JAM, GATE, CSIR NET, UGC NET > Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences
Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET PDF Download
Introduction
As an example of the use of the Lagrangian, we will examine the problem of small oscillations about a stable equilibrium point. The description of motion about a stable equilibrium is one of the most important problems in physics. This is true for both classical and quantum mechanics.
Although there are other means of solving this problem, the Lagrangian method results in equations of motion that emphasizes symmetries of the system.
1 Formulation of the Problem
We assume that the forces acting on the system are conservative in which the potential depends only on the spatial coordinates; it is independent of the time and velocity. In addition, the transformations de¯ning the generalized coordinates are assume to not depend on the time explicitly.
Hence, the constraints are time independent. For the system to be in equilibrium, the generalized force must be zero
 (1)
(1)
where q0i is the equilibrium point. Furthermore, the equilibrium point is stable if the second derivative of potential is positive; the potential is concave up at the equilibrium point.
We will be interested in small displacement about the equilibrium. Therefore, we will write the generalized coordinates in the following form qi = q0i + ηi where  is the displacement from the equilibrium point. Assuming the displacements are small, the potential can be expanded about q0i as follows
is the displacement from the equilibrium point. Assuming the displacements are small, the potential can be expanded about q0i as follows
 .
.
The first term in the expansion is a constant, since the potential is only defined to a constant, we can ignore this term. The second term is zero, since we are expanding about the minimum.
Therefore, the potential in this approximation is
 (3)
(3)
where we assume that the displacements are small such that higher order terms are negligible. The Vij in this equation are the equivalent spring constant for the one-dimensional problem. In addition, we note that the Vij are symmetric as can be seen from the definition.
The kinetic energy, as shown earlier, can be written as the sum of three terms

where 
Since we assume that the transformations are independent of time, only the Mij terms are nonzero; this is a natural system. In addition, since Mij in general is a function of the coordinates, we expand the Mij about the equilibrium point, since we are assuming small displacements about it
 (6)
(6)
We keep only the lowest order term in this expansion, since the kinetic energy is already quadratic in the coordinates (velocities). Thus, the kinetic energy becomes (7)
(7)
where the relation qi = q0i +ηi is used to derive  and Tij denotes Mij(q0). Note that the Tij
and Tij denotes Mij(q0). Note that the Tij
terms are symmetric.
The Lagrangian for small oscillations about an equilibrium point is (8)
(8)
where Tij describes the inertia of the system, and Vij the stiffness1. In Cartesian coordinates, and many other case, the kinetic energy term can be reduced to  the very familiar form of the kinetic energy. To calculate the equations of motion, we apply the Euler-Lagrange equations to the Lagrangian
the very familiar form of the kinetic energy. To calculate the equations of motion, we apply the Euler-Lagrange equations to the Lagrangian
 (9)
(9)
Keep in mind that the Mij and Vij are independent of the coordinates and time, and they are symmetric.
1.2 The Eigenvalues and Eigenvectors
The solutions to the equations of motion are of the form
 (10)
(10)
where C is an overall scale factor, ai the relative amplitude of the ith term, and the second equation comes from substituting the solutions into the equations of motion. Notice that this is a matrix equation, representing matrix multiplication between and n×n matrix and an n-dimensional column vector. This set of equations can be solved for the allowed values of ω by setting the determinant of the coefficients of ai equal to zero2
 (11)
(11)
where we have written the equation explicitly in matrix form. Through the manipulations we have performed, we have arrived at an eigenvalue problem
 (12)
(12)
where Va is shown to be a multiple of Ta. First we will show that the eigenvalues (λ) are real and positive, and the eigenvectors (a) are orthogonal. Start by taking the complex conjugate of Eq. 12 (13)
(13)
where we have used the fact that V and T are real and symmetric, and in addition, j corresponds to the jth eigenvalue and eigenvector. Next, multiply Eq. 13 by ai from the right
 (14)
(14)
For the ith eigenvalue and eigenvector, multiply Eq. 12 from the left by 
 (15)
(15)
Next, subtract the two equations (16)
(16)
If we assume that the λi are distinct and we consider the case  . This states that the amplitudes are orthogonal to each other with respect to T. Let’s now consider the case where i = j. First notice that
. This states that the amplitudes are orthogonal to each other with respect to T. Let’s now consider the case where i = j. First notice that  implies that the matrix product is real. Next, write
implies that the matrix product is real. Next, write  , where we have written ai in terms of its real and imaginary components. Then, we get
, where we have written ai in terms of its real and imaginary components. Then, we get
 (17)
(17)
Since the left hand side of this expression has already been shown to be real, the imaginary term is zero, thus
 (18)
(18)
Starting with Eq. 7, we see that in matrix notation the kinetic energy is (19)
(19)
Since η ∝ a and the phase of the amplitude is arbitrary, Eq. 18 represents twice the kinetic energy. For a real velocity, the kinetic energy must be positive. Therefore, the term  must be positive (we already showed it was real), therefore
must be positive (we already showed it was real), therefore  is real.
is real.
Since  is real, we can write ai as
is real, we can write ai as (20)
(20)
where N is an overall normalization factor, and φ is a real phase. The two factors can be absorbed into C of Eq. 10 making the ai real.
Starting with the eigenvalue equation (Eq. 12) and multiplying from the left by  , we can solve for the individual eigenvalues
, we can solve for the individual eigenvalues
 (21)
(21)
The denominator is proportional to the kinetic energy, thus is must be positive. The numerator is the potential energy, which must be positive for a stable equilibrium. Therefore, λi must be positive and the frequencies are therefore real. To remove the arbitrary normalization and phase from ai, we require  . Since we have an equation for each degree of freedom, we can combine this relation with
. Since we have an equation for each degree of freedom, we can combine this relation with  , and write a matrix A whose columns are the individual ai. This leads to the relation
, and write a matrix A whose columns are the individual ai. This leads to the relation
 (22)
(22)
which is a congruence transformation that diagonalizes the matrix T. We take this further by noting that Eq. 12 can be written as
 (23)
(23)
where λ is a diagonal matrix composed of the eigenvalues. If we multiply from the left by AT, we diagonalize V
 (24)
(24)
Therefore, the problem of small oscillation is reduced to solving the following matrix problem
 (25)
(25)
That is, we must find a transformation that diagonalizes the matrix T. In this form, the Lagrangian is written as
 (26)
(26)
1.3 Multiple Roots
Let’s assume that two of the eigenvalues are equal λ1 = λ2. From the formalism given above, we expect that one of the eigenvectors will be orthogonal to the remaining eigenvectors, but there is no guarantee that they will be orthogonal to each other; recall that we wish to create the matrix A, which must be orthogonal in order to diagonalize the T and V matrices. To do this, we can write one of the eigenvector as the sum of the two
 (27)
(27)
and apply the orthogonality relation
 (28)
(28)
This procedure can be generalized for n repeated roots (eigenvalues).
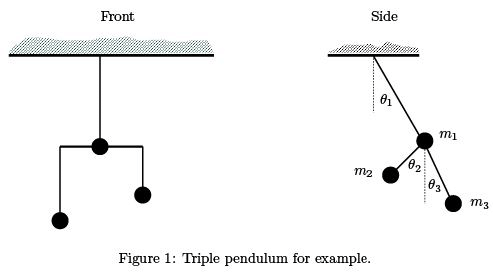
1.4 Example
Let’s consider a triple pendulum as shown in Fig 1. We would like to determine the eigenfrequencies and eigenvectors (normal modes) of this oscillator for small oscillations. We start by writing the Lagrangian in rectangular coordinates

where all the coordinates are measured from a coordinate system fixed to the pivot of the top pendulum as shown in the figure. Next we convert to a set of coordinates given by the angular displacement from the equilibrium point. The coordinates of the top pendulum are transformed as follows
 (30)
(30)
The kinetic and potential energies for m1 are
 (31)
(31)
where the approximation comes from expanding the potential in a Taylor series
 (32)
(32)
Next, we consider the kinetic and potential energies associated with m2. The transformation equations are

Applying the transformations to the m2 terms, the kinetic and potential energies are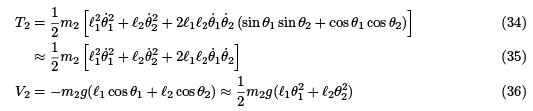
The kinetic and potential energies associated with m3 are arrived at in a manner similar to m2. These energies are

Combining the kinetic and potential energy terms together, the Lagrangian becomes
To determine the eigenvalues, we write the kinetic and potential energies in matrix form. The mass matrix for the kinetic energy is

and the stiffness matrix is

Next, we solve the eigenvalue equation
 (42)
(42)
The eigenvalues are given by setting the determinant of the coefficients of a equal to zero

Since the algebra becomes extremely complicated for arbitrary masses and lengths, we will take all the masses and length to be equal, in this case the determinant is

and the eigenfrequencies are (45)
(45)
Next, we calculate the motion of the normal modes. This is done by calculating the eigenvectors a for each eigenfrequency. We start with the the eigenfrequency ω2 = g/ℓ

We follow the same procedure for the two remaining eigenfrequencies and find the eigenvalues to be

where
 (48)
(48)
Finally, repeat for the remaining eigenfrequency and we get

where
 (50)
(50)
What we have arrived at is the following description of the motion: The mode associated with the frequency  has the upper mass stationary and the lower masses oscillating with the same amplitude, but π radians out of phase. The frequency
has the upper mass stationary and the lower masses oscillating with the same amplitude, but π radians out of phase. The frequency  corresponds to the two lower mass in phase and same amplitude, but π radians out of phase with the upper mass which has a smaller amplitude. The final mode corresponds to the two lower masses in phase with the upper mass, but the upper mass has a smaller amplitude.
corresponds to the two lower mass in phase and same amplitude, but π radians out of phase with the upper mass which has a smaller amplitude. The final mode corresponds to the two lower masses in phase with the upper mass, but the upper mass has a smaller amplitude.
The document Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET is a part of the Mathematics Course Mathematics for IIT JAM, GATE, CSIR NET, UGC NET.
All you need of Mathematics at this link: Mathematics
|
556 videos|198 docs
|

FAQs on Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences - Mathematics for IIT JAM, GATE, CSIR NET, UGC NET
| 1. What is the theory of small oscillations in classical mechanics? |  |
| 2. How are small oscillations different from general oscillations? | |
Ans. Small oscillations are a special case of general oscillations where the displacements from equilibrium positions are small. In small oscillations, the system can be linearized, and the equations of motion can be approximated as simple harmonic oscillators. In contrast, general oscillations may not have a linearized form and can exhibit more complex behavior.
| 3. What are the advantages of studying small oscillations in classical mechanics? | |
Ans. Studying small oscillations in classical mechanics provides several advantages. Firstly, it simplifies the analysis of complex systems by approximating their behavior as simple harmonic motion. Secondly, it allows for the determination of the stability of equilibrium positions and the identification of stable and unstable regions in the system's parameter space. Finally, it provides insights into the frequencies and modes of vibrations in physical systems.
| 4. How can the theory of small oscillations be applied in real-world scenarios? | |
Ans. The theory of small oscillations finds applications in various areas of physics and engineering. It is used to study the behavior of pendulums, springs, electrical circuits, molecular vibrations, and many other systems. By understanding the small oscillations of these systems, we can predict their natural frequencies, determine their stability, and design devices that utilize oscillatory motion.
| 5. Can the theory of small oscillations be applied to nonlinear systems? | |
Ans. The theory of small oscillations is primarily based on linearizing the equations of motion for small deviations from equilibrium. Therefore, it is most applicable to systems with linear restoring forces. However, in some cases, nonlinear systems can also be approximated as linear for small oscillations within a limited range. This approximation allows for the application of small oscillation theory to nonlinear systems.
Related Exams
About this Document

1.8K Views

4.95/5
Rating

Apr 28, 2025
Last updated
Document Description: Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences for Mathematics 2025 is part of Mathematics for IIT JAM, GATE, CSIR NET, UGC NET preparation.
The notes and questions for Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences have been prepared according to the Mathematics exam syllabus. Information about Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences covers topics
like and Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences Example, for Mathematics 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences.
Introduction of Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences in English is available as part of our Mathematics for IIT JAM, GATE, CSIR NET, UGC NET
for Mathematics & Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences in Hindi for Mathematics for IIT JAM, GATE, CSIR NET, UGC NET course.
Download more important topics related with notes, lectures and mock test series for Mathematics
Exam by signing up for free. Mathematics: Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET
Description
Full syllabus notes, lecture & questions for Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET - Mathematics | Plus excerises question with solution to help you revise complete syllabus for Mathematics for IIT JAM, GATE, CSIR NET, UGC NET | Best notes, free PDF download
Information about Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences
In this doc you can find the meaning of Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences defined & explained in the simplest way possible. Besides explaining types of
Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences theory, EduRev gives you an ample number of questions to practice Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences tests, examples and also practice Mathematics
tests

Related Searches
Objective type Questions
,UGC NET
,practice quizzes
,shortcuts and tricks
,UGC NET
,Theory of small oscillations - Classical Mechanics
,Previous Year Questions with Solutions
,Important questions
,Exam
,CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,GATE
,Theory of small oscillations - Classical Mechanics
,Theory of small oscillations - Classical Mechanics
,CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,ppt
,Summary
,GATE
,Viva Questions
,UGC NET
,study material
,video lectures
,Free
,mock tests for examination
,past year papers
,Extra Questions
,MCQs
,CSIR NET
,CSIR NET
,Sample Paper
,Semester Notes
,GATE
,CSIR NET
;


Additional Information about Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences for Mathematics Preparation
Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences Free PDF Download
The Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences is an invaluable resource that delves deep into the core of the Mathematics exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences now and kickstart your journey towards success in the Mathematics exam.
Importance of Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences
The importance of Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences cannot be overstated, especially for Mathematics aspirants.
This document holds the key to success in the Mathematics exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences Notes
Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences Notes on EduRev are your ultimate resource for success.
Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences Mathematics Questions
The "Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences Mathematics Questions" guide is a valuable resource for all aspiring students preparing for the
Mathematics exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences on the App
Students of Mathematics can study Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Theory of small oscillations - Classical Mechanics, CSIR-NET Mathematical Sciences is prepared as per the latest Mathematics syllabus.
|
© EduRev
|
Education Revolution
|



|






Signup on EduRev and stay on top of your study goals
10M+ students crushing their study goals daily