Controllability & Observability | Control Systems - Electrical Engineering (EE) PDF Download

Controllability
If the state of the system can be transferred to another desired state over a finite time period by using input is called controllability.
Consider the state equations
y(t) = C x(t) + D u(t)
where x denotes the state variable
u denotes the input variable
y denotes the output variable.
Kalman’s Test for Controllability
If a system matrix A has order n × n
Then we form a controllability matrix (Qc)
Qc = [B : AB : A2B : A3B : ……………… : An-2B : An-1B]
where controlled matrix B must be a column matrix.
The order of Qc is n × n.
Case-1: The system is controllable if the rank of Qc is ‘n’. In other words, when the determinant of Qc is non-zero, the system is controllable i.e. |Qc| ≠ 0.
Case-2: If |Qc| = 0 or the rank of Qc is not equal to ‘n’ then the system is said to be uncontrollable.
In order to check how many states are controllable in case-2, we consider sub-matrices of Qc of order (n-1) × (n-1) and again compute the determinant.
(i) If the determinant of any submatrices is non-zero then the rank will be (n-1). Hence the number of controllable states will be (n – 1).
(ii) If the determinant of all submatrices is zero then we consider sub-matrices of Qc of order (n-2) × (n-2) and again compute the determinant. If the determinant of any submatrices is non-zero then the rank will be (n-2). Hence the number of controllable states will be (n – 2).
The above steps are followed in a similar fashion until we get a non-zero determinant of any submatrices.
Gilbert’s Test to check controllability
It states that
A system is said to be controllable if row of B corresponding to the last row of each Jordan Block is non-zero.
A system is said to be controllable if all rows of B is non-zero in case matrix A is in diagonal canonical form.
Gilbert’s test is only applicable if matrix A is in Jordan canonical form or Diagonal canonical form.
Let us understand with the help of an example of Jordan canonical form.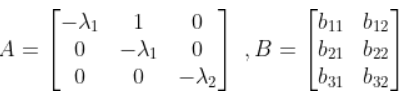 Here matrix A is in Jordan canonical form. The Jordan block JB1 and JB2 are
Here matrix A is in Jordan canonical form. The Jordan block JB1 and JB2 are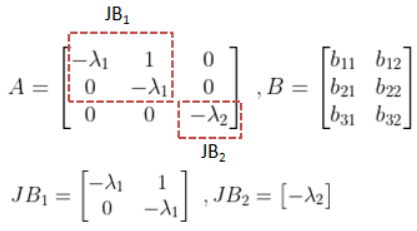 To check controllability, we see the last row of Jordan blocks.
To check controllability, we see the last row of Jordan blocks.
The last row of Jordan block JB1 corresponds to the second row of matrix A. The last row of Jordan block JB2 corresponds to the third row of matrix A.
Hence according to Gilbert’s test, we check the corresponding second and third rows of matrix B.
If these second and third rows of matrix B are non-zero then the system is controllable.
Let us understand with the help of an example of Diagonal canonical form.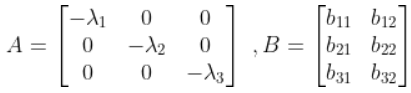 Now we treat it as Jordan canonical form with each Jordan block of order 1 × 1.
Now we treat it as Jordan canonical form with each Jordan block of order 1 × 1.
The Jordan block JB1, JB2 and JB3 are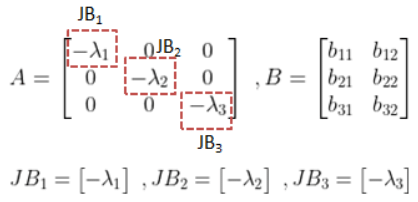 To check controllability, we see the last row of Jordan blocks.
To check controllability, we see the last row of Jordan blocks.
- The last row of Jordan block JB1 corresponds to the first row of matrix A.
- The last row of Jordan block JB2 corresponds to the second row of matrix A.
- The last row of Jordan block JB3 corresponds to the third row of matrix A.
Hence according to Gilbert’s test, we check the corresponding first, second, and third rows of matrix B.
If these first, second, and third rows of matrix B are non-zero then the system is controllable.
Observability
If all states of the system can be determined from the knowledge of output of the system at a given time is called observability.
Kalman’s Test for Observability
If a system matrix A has order n × n
Then we form an observability matrix (Qo)
Here, output matrix C is a row matrix.
The order of Qo is n × n.
Case-1: The system is observable if the rank of Qo is ‘n’. In other words, when the determinant of Qo is non-zero, the system is observable i.e. |Qo| ≠ 0.
Case-2: If |Qo| = 0 or the rank of Qo is not equal to ‘n’ then the system is said to be unobservable.
In order to check how many states are observable in case-2, we consider sub-matrices of Qo of order (n-1) × (n-1) and again compute the determinant.
(i) If the determinant of any submatrices is non-zero then the rank will be (n-1). Hence the number of observable states will be (n – 1).
(ii) If the determinant of all submatrices is zero then we consider sub-matrices of Qo of order (n-2) × (n-2) and again compute the determinant. If the determinant of any submatrices is non-zero then the rank will be (n-2). Hence the number of observable states will be (n – 2).
The above steps are followed in a similar fashion until we get a non-zero determinant of any submatrices.
Gilbert’s Test to check observability
It states that
A system is said to be observable if columns of C corresponding to the first row of each Jordan Block is non-zero.
A system is said to be observable if all columns of C is non-zero in case matrix A is in diagonal canonical form.
Gilbert’s test is only applicable if matrix A is in Jordan canonical form or Diagonal canonical form.
Let us understand with the help of an example of Jordan canonical form.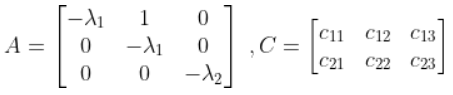 Here matrix A is in Jordan canonical form. The Jordan block JB1 and JB2 are
Here matrix A is in Jordan canonical form. The Jordan block JB1 and JB2 are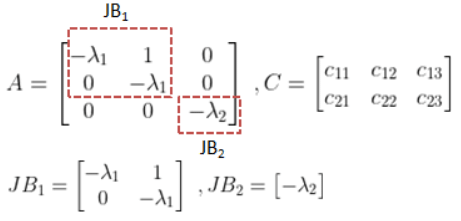 To check observability, we see the first row of Jordan blocks.
To check observability, we see the first row of Jordan blocks.
- The first row of Jordan block JB1 corresponds to the first row of matrix A.
The first row of Jordan block JB2 corresponds to the third row of matrix A.
Hence according to Gilbert’s test, we check the corresponding first and third columns of matrix C.
If these first and third columns of matrix C are non-zero then the system is unobservable.
Let us understand with the help of an example of Diagonal canonical form.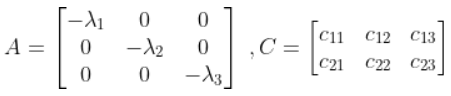 Now we treat it as Jordan canonical form with each Jordan block of order 1 × 1.
Now we treat it as Jordan canonical form with each Jordan block of order 1 × 1.
The Jordan block JB1, JB2 and JB3 are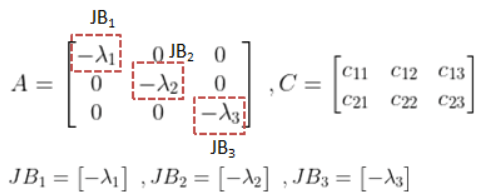 To check observability, we see the first row of Jordan blocks.
To check observability, we see the first row of Jordan blocks.
- The first row of Jordan block JB1 corresponds to the first row of matrix A.
- The first row of Jordan block JB2 corresponds to the second row of matrix A.
- The first row of Jordan block JB3 corresponds to the third row of matrix A.
Hence according to Gilbert’s test, we check the corresponding first, second, and third columns of matrix C.
If these first, second, and third columns of matrix C are non-zero then the system is observable.
|
53 videos|107 docs|40 tests
|



Summary
,Semester Notes
,Sample Paper
,study material
,Previous Year Questions with Solutions
,mock tests for examination
,Controllability & Observability | Control Systems - Electrical Engineering (EE)
,past year papers
,practice quizzes
,Viva Questions
,ppt
,Free
,video lectures
,Objective type Questions
,Important questions
,MCQs
,Extra Questions
,Controllability & Observability | Control Systems - Electrical Engineering (EE)
,shortcuts and tricks
,Exam
,Controllability & Observability | Control Systems - Electrical Engineering (EE)
;


Controllability & Observability Free PDF Download
Importance of Controllability & Observability
Controllability & Observability Notes
Controllability & Observability Electrical Engineering (EE) Questions
Study Controllability & Observability on the App
|
© EduRev
|
Education Revolution
|



|





