Q1: A 3-phase star connected slip ring induction motor has the following parameters referred to the stator:
Rs = 3Ω, Xs = 2Ω, X'r = 2Ω, R'r = 2.5Ω,
The per phase stator to rotor effective turns ratio is 3 : 1. The rotor winding is also star connected. The magnetizing reactance and core loss of the motor can be neglected. To have maximum torque at starting, the value of the extra resistance in ohms (referred to the rotor side) to be connected in series with each phase of the rotor winding is _____ (rounded off to 2 decimal places). (2024)
(a) 0.18
(b) 0.27
(c) 0.36
(d) 0.46
Ans: (b)
Sol:  Condition for the maximum torque
Condition for the maximum torque
Substituting, s = 1
As maximum torque at starting
Q2: A three phase, 50 Hz, 6 pole induction motor runs at 960 rpm. The stator copper loss, core loss, and the rotational loss of the motor can be neglected. the percentage efficiency of the motor is (2024)
(a) 92
(b) 94
(c) 96
(d) 98
Ans: (c)
Sol:
Q3: A three phase 415 V, 50 Hz, 6 − pole, 960 RPM, 4HP squirrel cage induction motor drives a constant torque load at rated speed operating from rated supply and delivering rated output. If the supply voltage and frequency are reduced by 20% the resultant speed of the motor in RPM (neglecting the stator leakage impednace and rotational losses) is ____ (Round off to the nearest integer) (2023)
(a) 542
(b) 632
(c) 760
(d) 852
Ans: (c)
Sol: Given : Torque is constant.
We have,
Synchronous speed, Now, from eqn. (1), we get
Synchronous speed at reduced frequency i.e. 50 x 0.8 = 40Hz.
∴ Motor speed,
N = (1 - Snew) Ns(new) = (1 - 0.05) x 800
= 760 rpm
Q4: A 3-phase, 415 V, 4-pole, 50 Hz induction motor draws 5 times the rated current at rated voltage at starting. It is required to bring down the starting current from the supply to 2 times of the rated current using a 3-phase autotransformer. If the magnetizing impedance of the induction motor and no load current of the autotransformer is neglected, then the transformation ratio of the autotransformer is given by _______. (round off to two decimal places). (2022)
(a) 0.24
(b) 0.48
(c) 0.63
(d) 0.97
Ans: (c)
Sol: From the above eqiations.
Q5: The frequencies of the stator and rotor currents flowing in a three-phase 8-pole induction motor are 40 Hz and 1 Hz, respectively. The motor speed, in rpm, is _______. (round off to nearest integer) (2022)
(a) 254
(b) 365
(c) 542
(d) 585
Ans: (d)
Sol: We have, fr = sfs
Slip, s = (1/40) = 0.025
Now, speed
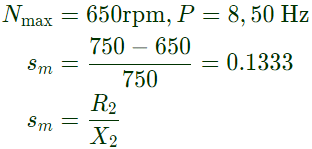
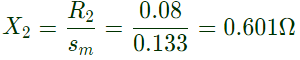
Q6: An 8-pole, 50Hz, three-phase, slip-ring induction motor has an effective rotor resistance of 0.08Ω per phase. Its speed at maximum torque is 650 RPM. The additional resistance per phase that must be inserted in the rotor to achieve maximum torque at start is _____________ Ω. (Round off to 2 decimal places.) Neglect magnetizing current and stator leakage impedance. Consider equivalent circuit parameters referred to stator. (2021)
(a) 0.25
(b) 0.44
(c) 0.52
(d) 0.68
Ans: (c)
Sol: ∴ Condition for maximum Ts
⇒ R2 = X2
∴ R2 + Rext = X2
∴ Rext = 0.601 - 0.08 = 0.521Ω
Q7: The power input to a 500 V, 50 Hz, 6-pole, 3-phase induction motor running at 975 RPM is 40 kW . The total stator losses are 1 kW. If the total friction and windage losses are 2.025 kW, then the efficiency is _____________%. (2021)
(a) 85
(b) 95
(c) 90
(d) 98
Ans: (c)
Sol:
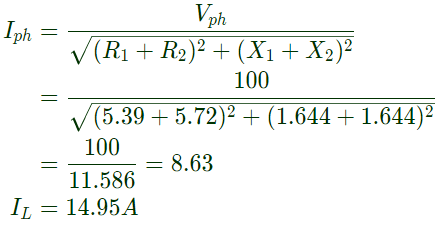
Q8: A delta-connected, 3.7 kW, 400 V(line), three-phase, 4-pole, 50-Hz squirrel-cage induction motor has the following equivalent circuit parameters per phase referred to the stator:
R1 = 5.39Ω, R2 = 5.72Ω, X1 = X2 = 8.22Ω.
Neglect shunt branch in the equivalent circuit. The starting line current in amperes (round off to two decimal places) when it is connected to a 100 V (line), 10 Hz, three-phase AC source is ______ (2019)
(a) 8.25
(b) 14.95
(c) 25.45
(d) 32.85
Ans: (b)
Sol:
Q9: The parameter of an equivalent circuit of a three-phase induction motor affected by reducing the rms value of the supply voltage at the rated frequency is (2019)
(a) rotor resistance
(b) rotor leakage reactance
(c) magnetizing reactance
(d) stator resistance
Ans: (c)
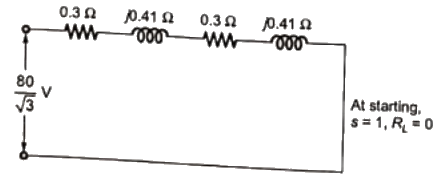
Q10: A star-connected, 12.5 kW, 208 V (line), 3-phase, 60 Hz squirrel cage induction motor has following equivalent circuit parameters per phase referred to the stator: R1 = 0.3Ω, R2 = 0.3Ω, X1 = 0.41Ω, X2 = 0.41Ω. Neglect shunt branch in the equivalent circuit. The starting current (in Ampere) for this motor when connected to an 80 V (line), 20 Hz, 3-phase AC source is __________. (SET-2 (2017))
(a) 50
(b) 60
(c) 70
(d) 80
Ans: (c)
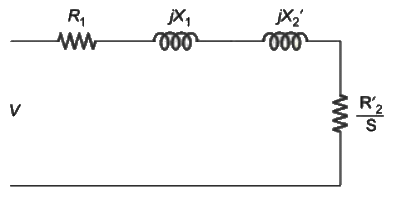
Sol: Equivalent circuit representation during starting-according to question
Total resistance to stator = 0.6Ω
Total reactance reference to stator = 0.82Ω
Reactance for 60Hz → 0.82Ω
Reactance for 60 Hz →?
∵ Xe ∝ F
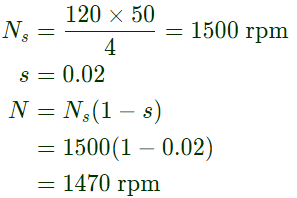
Q11: A 3-phase, 4-pole, 400 V, 50 Hz squirrel-cage induction motor is operating at a slip of 0.02. The speed of the rotor flux in mechanical rad/sec, sensed by a stationary observer, is closest to (SET-2 (2017))
(a) 1500
(b) 1470
(c) 157
(d) 154
Ans: (c)
Sol: As it was specified rotor rmf with respect to stationary part/sector.
Rotor rmf w.r.t. stator is always at Ns.
∴ Speed of rotor flux in mechanical radian/sec.
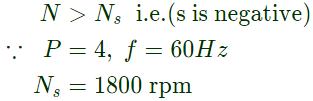
Q12: A 4 pole induction machine is working as an induction generator. The generator supply frequency is 60 Hz. The rotor current frequency is 5 Hz. The mechanical speed of the rotor in RPM is (SET-1 (2017))
(a) 1350
(b) 1650
(c) 1950
(d) 2250
Ans: (c)
Sol: Induction Generator Mode:
Rotor frequency given = 5Hz ⇒ (s × f)
∵ It is induction generator slip will be -0.0833.
Q13: The starting line current of a 415 V, 3-phase, delta connected induction motor is 120 A, when the rated voltage is applied to its stator winding. The starting line current at a reduced voltage of 110 V, in ampere, is _________. (SET-2 (2016))
(a) 11.4
(b) 22.5
(c) 31.8
(d) 44.2
Ans: (c)
Sol: 415V, 3-phase, Δ connected induction motor
(Ist)line = 120A at rated voltage.
at, V = 110V, i.e. reduced voltage
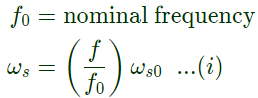
Q14: In a constant V/f induction motor drive, the slip at the maximum torque (SET-1 (2016)
(a) is directly proportional to the synchronous speed.
(b) remains constant with respect to the synchronous speed.
(c) has an inverse relation with the synchronous speed.
(d) has no relation with the synchronous speed.
Ans: (c)
Sol:
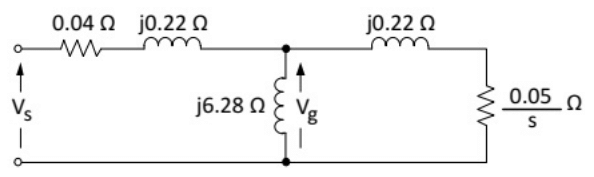
Q15: The figure shows the per-phase equivalent circuit of a two-pole three-phase induction motor operating at 50 Hz. The "air-gap" voltage, Vg across the magnetizing inductance, is 210 V rms, and the slip, s, is 0.05. The torque (in Nm) produced by the motor is ________. (SET-2 (2015))
(a) 200.45
(b) 305.25
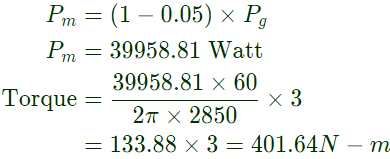
(c) 401.64
(d) 455.65
Ans: (c)
Sol: Active power
Q16: A 3-phase 50 Hz square wave (6-step) VSI feeds a 3-phase, 4 pole induction motor. The VSI line voltage has a dominant 5th harmonic component. If the operating slip of the motor with respect to fundamental component voltage is 0.04, the slip of the motor with respect to 5th harmonic component of voltage is _________. (SET-1 (2015))
(a) 1.20
(b) 1.82
(c) 2.14
(d) 6.23
Ans: (a)
Sol: Slip due to 5th harmmonic
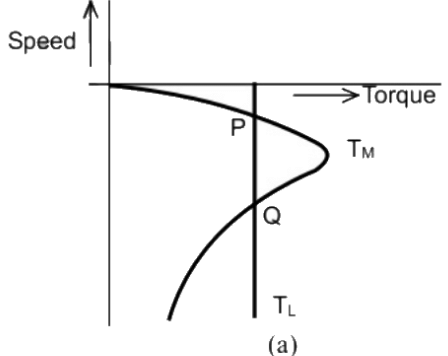
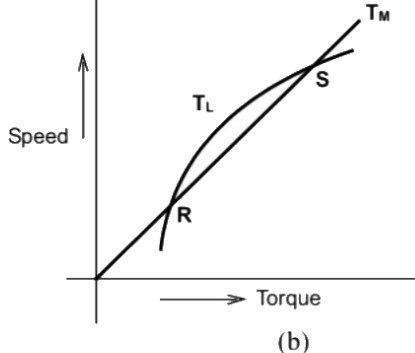
Q17: The torque speed characteristics of motor (TM) and load (TL) for two cases are shown in the figures (a) and (b). The load torque is equal to motor torque at points P, Q, R and S.
The stable operating points are (SET-3 (2014))
(a) P and R
(b) P and S
(c) Q and R
(d) Q and S
Ans: (b)
Sol: For given system,
slip = (2 - s)(speed = negative)
Below point P, TM − Tl < 0
⇒ speed decreases
∴ S increases
∴ slip = (2 - s) decreases
Above point P, Tm − Tl > 0
⇒ speed increases
∴ S decreases and (2-s) increasaes.
Thus, system is stable near point P.
POINT R:
Below point R: TM − Tl < 0 ⇒ speed decreases
Above point R: TM − Tl > 0 ⇒ speed increases
Thus, system can't regain stability at point R.
Therefore, R is unstable point.
POINT S:
Below point S: TM − Tl > 0 ⇒ speed increases
Above point S TM − Tl < 0 ⇒ speed decreases
Thus, system can regain stability near point S.
Q18: A single phase induction motor is provided with capacitor and centrifugal switch in series with auxiliary winding. The switch is expected to operate at a speed of 0.7 Ns, but due to malfunctioning the switch fails to operate. The torque-speed characteristic of the motor is represented by (SET-3 (2014))
(a) (b) (c) (d) Ans: (c)
Sol: The centrifugal switch is used to snaps the load at 70% of synchronous speed. Therefore, the speed-torque characteristic will have kink in speed-torque characteristic at 70% of Ns if the switch operates. When the switch fails to operate, 1 − ϕ induction motor will have torque-speed characteristic similar to a threephase induction motor.
Q19: A three phase slip-ring induction motor, provided with a commutator winding, is shown in the figure. The motor rotates in clockwise direction when the rotor windings are closed.
If the rotor winding is open circuited and the system is made to run at rotational speed fr with the help of prime-mover in anti-clockwise direction, then the frequency of voltage across slip rings is f1 and frequency of voltage across commutator brushes is f2. The values of f1 and f2 respectively are (SET-2 (2014))
(a) f + fr and f
(b) f − fr and f
(c) f − fr and f + fr
(d) f + fr and f − fr
Ans: (a)
Sol: Frequency of voltage across slip ring = Frequency of voltage induced in the rotor winding. Let speed corresponding to stator frequency, f = Ns.
and speed corresponding to fr = Nr
Then, frequency of rotor induced emf = f + fr
Also, frequency of induced voltage across commutator = stator frequency = f.
Q20: In a constant V/f control of induction motor, the ratio V/f is maintained constant from 0 to base frequency, where V is the voltage applied to the motor at fundamental frequency f . Which of the following statements relating to low frequency operation of the motor is TRUE ? (SET-2 (2014))
(a) At low frequency, the stator flux increases from its rated value.
(b) At low frequency, the stator flux decreases from its rated value.
(c) At low frequency, the motor saturates.
(d) At low frequency, the stator flux remains unchanged at its rated value.
Ans: (b)
Sol: In a 3−ϕ induction motor, induced emf equation per phase is given by
Since V/f ratio is constant (to avoid over sluxing), therefore,

 Condition for the maximum torque
Condition for the maximum torque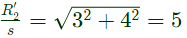 Substituting, s = 1
Substituting, s = 1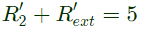

 Now, from eqn. (1), we get
Now, from eqn. (1), we get Synchronous speed at reduced frequency i.e. 50 x 0.8 = 40Hz.
Synchronous speed at reduced frequency i.e. 50 x 0.8 = 40Hz. ∴ Motor speed,
∴ Motor speed, From the above eqiations.
From the above eqiations.

 ∴
∴ 
 Condition for maximum Ts
Condition for maximum Ts
 Total resistance to stator = 0.6Ω
Total resistance to stator = 0.6Ω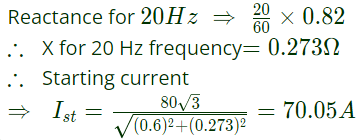
 As it was specified rotor rmf with respect to stationary part/sector.
As it was specified rotor rmf with respect to stationary part/sector.
 Rotor frequency given = 5Hz ⇒ (s × f)
Rotor frequency given = 5Hz ⇒ (s × f) 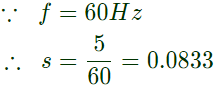 ∵ It is induction generator slip will be -0.0833.
∵ It is induction generator slip will be -0.0833.

 (a) 200.45
(a) 200.45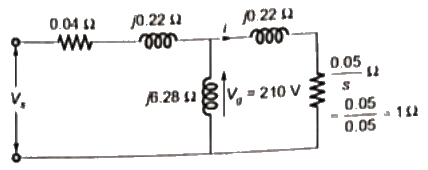
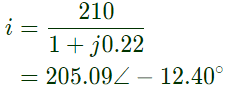 Active power
Active power 
 Slip due to 5th harmmonic
Slip due to 5th harmmonic
 The stable operating points are (SET-3 (2014))
The stable operating points are (SET-3 (2014))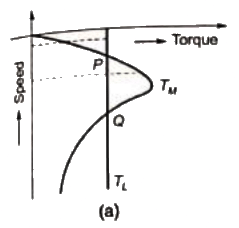
 For given system,
For given system,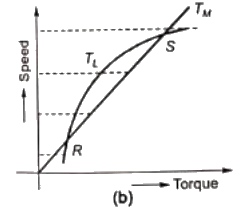 POINT R:
POINT R: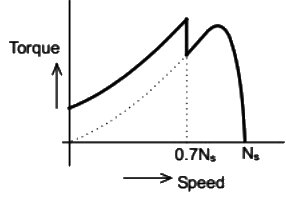 (b)
(b) 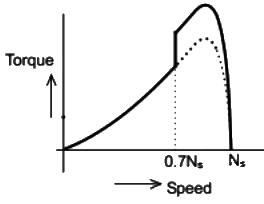 (c)
(c) 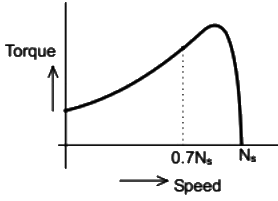 (d)
(d) 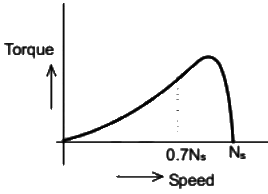 Ans: (c)
Ans: (c)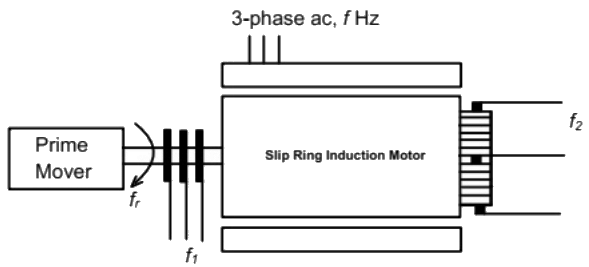 If the rotor winding is open circuited and the system is made to run at rotational speed fr with the help of prime-mover in anti-clockwise direction, then the frequency of voltage across slip rings is f1 and frequency of voltage across commutator brushes is f2. The values of f1 and f2 respectively are (SET-2 (2014))
If the rotor winding is open circuited and the system is made to run at rotational speed fr with the help of prime-mover in anti-clockwise direction, then the frequency of voltage across slip rings is f1 and frequency of voltage across commutator brushes is f2. The values of f1 and f2 respectively are (SET-2 (2014)) Also, frequency of induced voltage across commutator = stator frequency = f.
Also, frequency of induced voltage across commutator = stator frequency = f.
 Since V/f ratio is constant (to avoid over sluxing), therefore,
Since V/f ratio is constant (to avoid over sluxing), therefore,