Exercise Questions - Introduction to Digital Signal Processing | Digital Signal Processing - Electronics and Communication Engineering (ECE) PDF Download

Exercise Questions
Q. y(n)-0.4 y(n-1) = x(n). find the anti-causal impulse response? h(n)=0 for n≥ 0
h(n-1) = 2.5 [h(n)- δ (n) ]
h(-1) = 2.5 [h(0)- δ (0) ] = -2.5
h(-2) = -2.52 . …….. h(n) = -2.5n valid for n ≤ -1
Q. x(n)={1,2,3} y(n)={3,4} Obtain difference equation from i/p & o/p information
y(n) + 2 y(n-1) + 3 y(n-2) = 3 x(n) + 4 x(n-1) (Ans)
Q. x(n) = {4,4,}, y(n)= x(n)- 0.5x(n-1). Find the difference equation of the inverse system. Sketch the realization of each system and find the output of each system.
Solution:
The original system is y(n)=x(n)-0.5 x(n-1)
The inverse system is x(n)= y(n)-0.5 y(n-1)
y (n) = x (n) – 0.5 x(n-1)
Y (z) = X (z) [1-0.5Z-1]
System
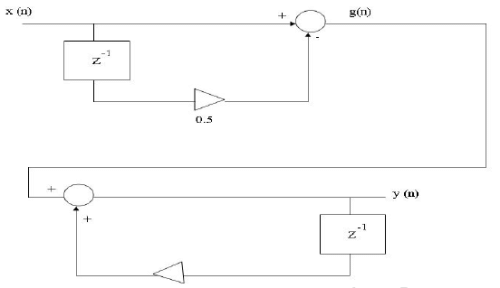
Inverse System
y (n) – 0.5 y(n-1) =x(n)
Y (z) [1-0.5 Z-1] = X (z)
g (n) = 4 δ (n) - 2δ(n-1) + 4δ (n-1) - 2δ (n-2) = 4δ (n) + 2δ (n-1) - 2δ (n-2)
y (n) = 0.5 y(n-1) + 4δ (n) + 2δ (n-1) – 2δ (n-2)
y (0) = 0.5y(-1) + 4δ (0) = 4
y(1) = 4
y(2) = 0.5 y(1) - 2δ (0) = 0
y(n) = {4, 4} same as i/p
| Non Recursive filters | Recursive filters |
y(n) for causal system
For causal i/p sequence |
Present response is a function of the present and past N values of the excitation as well as the past N values of response. It gives IIR o/p but not |
y(n) = Present response depends only on present i/p & previous i/ps but not future i/ps. It gives FIR o/p | always. (n) – y(n-1) = x(n) – x(n-3) |


 ak x(n-k)
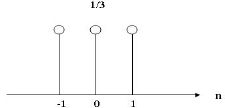
ak x(n-k)Q. y(n) = 1/3[x (n+1) + x (n) + x (n-1)] Find the given system is stable or not?
Let x(n) = δ (n)
h(n) = 1/3 [ δ (n+1) + δ (n) + δ(n-1)]
h(0) = 1/3
h(-1) = 1/3
h(1) = 1/3
s=∑h(n) <∞ therefore Stable.
Q. y(n) = a y(n-1) + x(n) given y(-1) = 0
Let x(n) = δ (n)
h(n) = y(n) = a y(n-1) + δ (n)
h(0) = a y(-1) +δ (0) = 1 = y(0)
h(1) = a y(0) + δ (1) = a
h(2) = a y(1) + δ (2) = a2 . . . . . . . h(n) = an u(n) stable if a<1.
y(n-1) =1/a [ y(n) – x(n)]
y(n) = 1/a [ y(n+1) – x(n+1)]
y(-1) = 1/a [ y(0) – x(0)]=0
y(-2) = 0
Q. y(n) = 1/n+1 y(n-1) + x(n) for n ≥ 0
= 0 otherwise. Find whether given system is time variant or not?
Let x(n) = δ (n)
h (0) = 1 y(-1) +δ (0) = 1
h(1) = ½ y(0) + δ(1) = ½
h(2) = 1/6
h(3) = 1/24
if x(n) = δ (n-1)
y(n) = h(n-1)
h(n-1) = y(n) =1/n+1 h(n-2) + δ (n-1)
n=0 h(-1) = y(0) = 1 x 0+0 =0
n=1 h(0) = y(1) = ½ x 0 +δ (0)= 1
n=2 h(1) = y(2) = 1/3 x 1 + 0 = 1/3
h(2) = 1/12
∴ h (n, 0) ≠ h (n,1) ∴ TV
Q. y (n) = 2n x(n) Time varying
Q. y (n) =1/3 [x (n+1) + x (n) + x (n-1)] Linear
Q. y (n) = 12 x (n-1) + 11 x(n-2) TIV
Q. y (n) = 7 x2(n-1) non linear
Q. y (n) = x2(n) non linear
Q. y (n) = n2 x (n+2) linear
Q. y (n) = x (n2) linear
Q. y (n) = ex(n) non linear
Q. y (n) = 2x(n) x (n) non linear, TIV
(If the roots of characteristics equation are a magnitude less than unity. It is a necessary & sufficient condition) Non recursive system, or FIR filter are always stable
Q. y (n) + 2 y2(n) = 2 x(n) – x(n-1) non linear, TIV
Q. y (n) - 2 y (n-1) = 2x(n) x (n) non linear, TIV
Q. y (n) + 4 y (n) y (2n) = x (n) non linear, TIV
Q. y (n+1) – y (n) = x (n+1) is causal
Q. y (n) - 2 y (n-2) = x (n) causal
Q. y (n) - 2 y (n-2) = x (n+1) non causal
Q. y (n+1) – y (n) = x (n+2) non causal
Q. y (n-2) = 3 x (n-2) is static or Instantaneous.
Q. y (n) = 3 x (n-2) dynamic
Q. y (n+4) + y (n+3) = x (n+2) causal & dynamic
Q. y (n) = 2 x (αη )
If α=1 causal, static
α <1 causal, dynamic
α >1 non causal, dynamic
α≠ 1 TV
Q. y (n) = 2(n+1) x (n) is causal & static but TV.
Q. y (n) = x (-n) TV
|
3 videos|75 docs|54 tests
|
FAQs on Exercise Questions - Introduction to Digital Signal Processing - Digital Signal Processing - Electronics and Communication Engineering (ECE)
| 1. What is digital signal processing in electrical engineering? |  |
| 2. How is digital signal processing different from analog signal processing? | |
| 3. What are some applications of digital signal processing in electrical engineering? | |
| 4. What are the key components of a digital signal processing system? | |
| 5. What skills are essential for a career in digital signal processing in electrical engineering? | |


Summary
,Exercise Questions - Introduction to Digital Signal Processing | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,Viva Questions
,Exercise Questions - Introduction to Digital Signal Processing | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,Previous Year Questions with Solutions
,Important questions
,practice quizzes
,Exercise Questions - Introduction to Digital Signal Processing | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,video lectures
,Extra Questions
,Objective type Questions
,Semester Notes
,past year papers
,Free
,mock tests for examination
,ppt
,Sample Paper
,study material
,MCQs
,shortcuts and tricks
,Exam
;


Exercise Questions - Introduction to Digital Signal Processing Free PDF Download
Importance of Exercise Questions - Introduction to Digital Signal Processing
Exercise Questions - Introduction to Digital Signal Processing Notes
Exercise Questions - Introduction to Digital Signal Processing Electronics and Communication Engineering (ECE)
Study Exercise Questions - Introduction to Digital Signal Processing on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!