Test: Controllers & Compensators - 1 - Electronics and Communication Engineering (ECE) MCQ
10 Questions MCQ Test - Test: Controllers & Compensators - 1

A first order dynamic linear system with a proportional controller exhibits an offset to a unit step input. The offset can be reduced by
 . The offset can be reduced by adding integral mode.
. The offset can be reduced by adding integral mode.Addition of zeros in a transfer function causes

Match List-I (Type of controllers) with List-II (Operation) and select the correct answer using the codes given below the lists:
List-I
A. Hydraulic controller
B. Pneumatic controller
C. Electronic controller
List-II
1. Fire and explosion of proof operation
2. Flexible operation
3. High torque, high speed operation
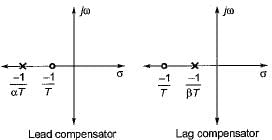
Consider the following statements related to compensators used in control system applications:
1. When transient response is satisfactory and steady state characteristics are not satisfactory, normally lag compensation is employed.
2. Phase lag network is used to increase system stability and maintain velocity gain constant.
3. The capacitance is not used to fabricate a lag network.
Which of these statements is/are correct?
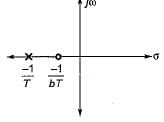
The transfer function of a phase-lead controller is given by
Addition of a pole to the closed-loop transfer function results in
Which of the following properties is/are not exhibited by a phase lead network?
1. The velocity constant is usually increased.
2. The slope of the magnitude curve is reduced at the gain cross over frequency.
3. The bandwidth is reduced.
4. The response becomes faster.
Assertion (A): If the phase shift decreases rapidly near the gain cross over frequency, phase lead compensation becomes ineffective.
Reason (R): The additional phase lead at gain crossover frequency is added to a much smaller phase angle than that at the old gain crossover frequency.
Important Questions for Controllers & Compensators - 1
Controllers & Compensators - 1 MCQs with Answers
Online Tests for Controllers & Compensators - 1
|
© EduRev
|
Education Revolution
|



|








