GATE Electrical Engineering (EE) Test: Polar Plot - 1 Free Online Test
MCQ Practice Test & Solutions: Test: Polar Plot - 1 (15 Questions)
You can prepare effectively for Electrical Engineering (EE) GATE Electrical Engineering (EE) Mock Test Series 2027 with this dedicated MCQ Practice Test (available with solutions) on the important topic of "Test: Polar Plot - 1". These 15 questions have been designed by the experts with the latest curriculum of Electrical Engineering (EE) 2026, to help you master the concept.
Test Highlights:
- - Format: Multiple Choice Questions (MCQ)
- - Duration: 45 minutes
- - Number of Questions: 15
Sign up on EduRev for free to attempt this test and track your preparation progress.

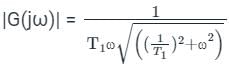
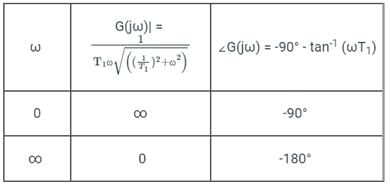
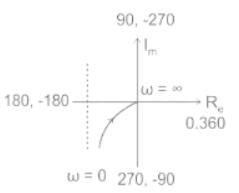
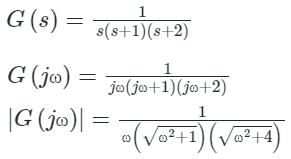
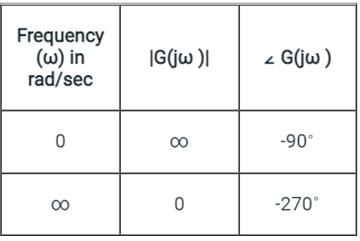
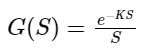
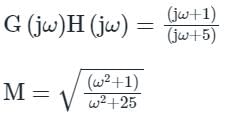
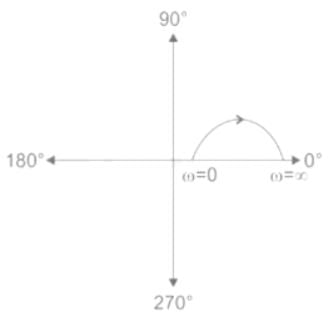
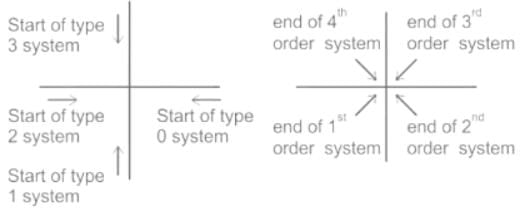
The polar plot of the transfer function for 0 ≤ ω ≤ ∞ will be in the
for 0 ≤ ω ≤ ∞ will be in the
for 0 ≤ ω ≤ ∞ will be in theDetailed Solution: Question 1
 (it is Lead compensator)
(it is Lead compensator)


Detailed Solution: Question 2

Directions: It consists of two statements, one labelled as the ‘Statement (I)’ and the other as ‘Statement (II)’. Examine these two statements carefully and select the answers to these items using the codes given below:
Statement (I): The polar plot has limitation for portraying the frequency response of a system.
Statement (II): The calculation of frequency response is tedious and does not indicate the effect of the individual poles and zeros.
Statement (I): The polar plot has limitation for portraying the frequency response of a system.
Statement (II): The calculation of frequency response is tedious and does not indicate the effect of the individual poles and zeros.
Detailed Solution: Question 3
Detailed Solution: Question 4
The polar plot of a transfer function with ω as the parameter is known as the
Detailed Solution: Question 5
The frequency response of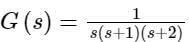 plotted in the complex G(jω) plane (for 0 < ω < ∞) is
plotted in the complex G(jω) plane (for 0 < ω < ∞) is
plotted in the complex G(jω) plane (for 0 < ω < ∞) isDetailed Solution: Question 6



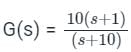
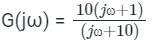
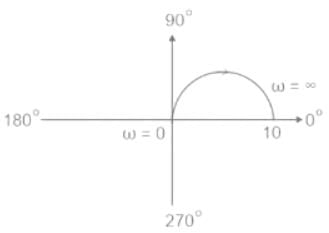
The polar plot of the transfer function G (s) = 10 (s + 1) / (s + 10) will be in the
Detailed Solution: Question 7

Detailed Solution: Question 8

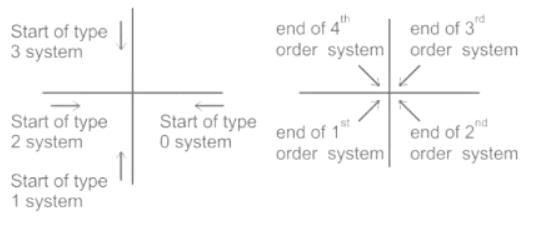
The quadrant at which the polar plot of transfer function lies is ______
lies is ______
lies is ______Detailed Solution: Question 9


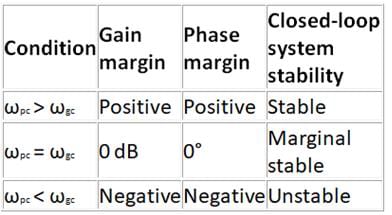
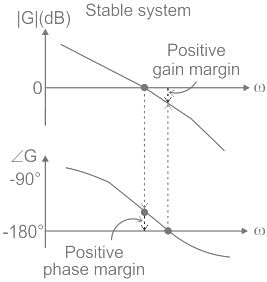
A system with a unity gain margin and zero phase margin is _____
Detailed Solution: Question 10



Detailed Solution: Question 11
If the constant 'k' is negative, then what would be its contribution to the phase plot:
Detailed Solution: Question 12

If gain margin and phase margin both are positive, then the system is said to be :
Detailed Solution: Question 13

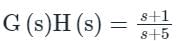
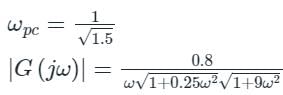
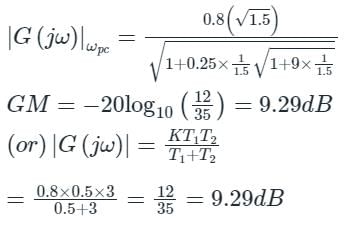
Transfer function of a system is given as
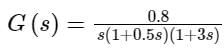
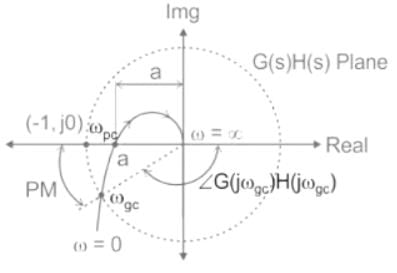
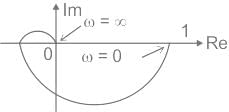
Polar plot of the same system is

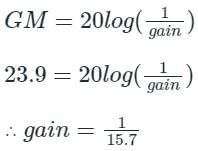
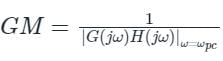
Gain margin (in dB) of the system is ______. (Important - Enter only the numerical value in the answer)
Polar plot of the same system is
Gain margin (in dB) of the system is ______. (Important - Enter only the numerical value in the answer)
Detailed Solution: Question 14
Detailed Solution: Question 15

26 docs|247 tests |