











Class 11 Exam > Class 11 Questions > A simple harmonic oscillator of angular frequ...
Start Learning for Free

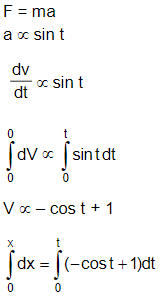
A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to :

Verified Answer
A simple harmonic oscillator of angular frequency 2 rad s–1 is acted u...
 This question is part of UPSC exam. View all Class 11 courses
This question is part of UPSC exam. View all Class 11 courses
Most Upvoted Answer
A simple harmonic oscillator of angular frequency 2 rad s–1 is acted u...
Introduction:
In a simple harmonic oscillator, the position of the oscillator at later times is determined by the external force acting on it. In this case, the external force is given by F = sin t N, where t is the time in seconds. We need to determine the position of the oscillator at later times, considering that it is initially at rest in its equilibrium position at t = 0.
Explanation:
To find the position of the oscillator at later times, we can use the equation of motion for a simple harmonic oscillator:
m(d^2x/dt^2) + kx = F
where m is the mass of the oscillator, x is the position of the oscillator, k is the spring constant, and F is the external force.
Step 1: Determine the spring constant:
Since the angular frequency of the oscillator is given as 2 rad s–1, we can use the formula:
k = mω^2
where ω is the angular frequency. Plugging in the values, we get:
k = m(2^2) = 4m
Step 2: Solve the differential equation:
Substituting the given external force F = sin t N into the equation of motion, we have:
m(d^2x/dt^2) + 4mx = sin t
This is a second-order linear homogeneous ordinary differential equation with constant coefficients. The general solution to this equation is of the form:
x(t) = A*cos(2t) + B*sin(2t) + xs
where A and B are constants determined by the initial conditions and xs is the particular solution to the non-homogeneous equation.
Step 3: Determine the particular solution:
To find the particular solution xs, we can assume it has the same form as the external force F, but with unknown coefficients:
xs = Asin(t) + Bcos(t)
Differentiating xs twice with respect to t, we get:
d^2xs/dt^2 = -Asin(t) - Bcos(t)
Substituting this into the differential equation, we have:
-m(Asin(t) + Bcos(t)) + 4m(Asin(t) + Bcos(t)) = sin(t)
Simplifying the equation, we get:
(3m - 4mB)sin(t) + (4mA - m)cos(t) = sin(t)
For the equation to hold true for all values of t, the coefficients of sin(t) and cos(t) on both sides must be equal. Therefore, we have:
3m - 4mB = 1
4mA - m = 0
Solving these two equations simultaneously, we find:
B = 3/4
A = 1/16
Step 4: Substitute the values into the general solution:
Substituting the values of A and B into the general solution, we get:
x(t) = (1/16)*sin(t) + (3/4)*cos(t) + A*cos(2t) + B*sin(2t)
Simplifying further, we have:
x(t) = (1/16)*sin(t) + (3/4)*cos(t) + (3/4)*sin(2t) + (1
In a simple harmonic oscillator, the position of the oscillator at later times is determined by the external force acting on it. In this case, the external force is given by F = sin t N, where t is the time in seconds. We need to determine the position of the oscillator at later times, considering that it is initially at rest in its equilibrium position at t = 0.
Explanation:
To find the position of the oscillator at later times, we can use the equation of motion for a simple harmonic oscillator:
m(d^2x/dt^2) + kx = F
where m is the mass of the oscillator, x is the position of the oscillator, k is the spring constant, and F is the external force.
Step 1: Determine the spring constant:
Since the angular frequency of the oscillator is given as 2 rad s–1, we can use the formula:
k = mω^2
where ω is the angular frequency. Plugging in the values, we get:
k = m(2^2) = 4m
Step 2: Solve the differential equation:
Substituting the given external force F = sin t N into the equation of motion, we have:
m(d^2x/dt^2) + 4mx = sin t
This is a second-order linear homogeneous ordinary differential equation with constant coefficients. The general solution to this equation is of the form:
x(t) = A*cos(2t) + B*sin(2t) + xs
where A and B are constants determined by the initial conditions and xs is the particular solution to the non-homogeneous equation.
Step 3: Determine the particular solution:
To find the particular solution xs, we can assume it has the same form as the external force F, but with unknown coefficients:
xs = Asin(t) + Bcos(t)
Differentiating xs twice with respect to t, we get:
d^2xs/dt^2 = -Asin(t) - Bcos(t)
Substituting this into the differential equation, we have:
-m(Asin(t) + Bcos(t)) + 4m(Asin(t) + Bcos(t)) = sin(t)
Simplifying the equation, we get:
(3m - 4mB)sin(t) + (4mA - m)cos(t) = sin(t)
For the equation to hold true for all values of t, the coefficients of sin(t) and cos(t) on both sides must be equal. Therefore, we have:
3m - 4mB = 1
4mA - m = 0
Solving these two equations simultaneously, we find:
B = 3/4
A = 1/16
Step 4: Substitute the values into the general solution:
Substituting the values of A and B into the general solution, we get:
x(t) = (1/16)*sin(t) + (3/4)*cos(t) + A*cos(2t) + B*sin(2t)
Simplifying further, we have:
x(t) = (1/16)*sin(t) + (3/4)*cos(t) + (3/4)*sin(2t) + (1
Attention Class 11 Students!
To make sure you are not studying endlessly, EduRev has designed Class 11 study material, with Structured Courses, Videos, & Test Series. Plus get personalized analysis, doubt solving and improvement plans to achieve a great score in Class 11.

|
|
Explore Courses for Class 11 exam
|
|
Similar Class 11 Doubts


Top Courses for Class 11View all




A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to :
Question Description
A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : for Class 11 2024 is part of Class 11 preparation. The Question and answers have been prepared according to the Class 11 exam syllabus. Information about A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : covers all topics & solutions for Class 11 2024 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to :.
A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : for Class 11 2024 is part of Class 11 preparation. The Question and answers have been prepared according to the Class 11 exam syllabus. Information about A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : covers all topics & solutions for Class 11 2024 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to :.
Solutions for A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : in English & in Hindi are available as part of our courses for Class 11.
Download more important topics, notes, lectures and mock test series for Class 11 Exam by signing up for free.
Here you can find the meaning of A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : defined & explained in the simplest way possible. Besides giving the explanation of
A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to :, a detailed solution for A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : has been provided alongside types of A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : theory, EduRev gives you an
ample number of questions to practice A simple harmonic oscillator of angular frequency 2 rad s–1 is acted upon by an external force F = sin t N. If theoscillator is at rest in its equilibrium position at t = 0, its position at later times is proportional to : tests, examples and also practice Class 11 tests.
|
|
Explore Courses for Class 11 exam
|
|
Suggested Free Tests
Signup for Free!
Signup to see your scores go up within 7 days! Learn & Practice with 1000+ FREE Notes, Videos & Tests.




|
© EduRev
|
Education Revolution
|



|








Signup to see your scores
go up within 7 days!
Access 1000+ FREE Docs, Videos and Tests
Takes less than 10 seconds to signup