











Electronics and Communication Engineering (ECE) Exam > Electronics and Communication Engineering (ECE) Questions > A second – order LTI system is describe...
Start Learning for Free
A second – order LTI system is described by the following state equations,
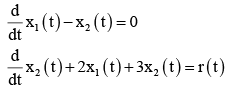
Where x1 (t) and x2 (t) are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.
- a)Undamped (oscillatory)
- b)Under damped
- c)Critically damped
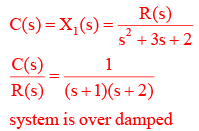
- d)Over damped
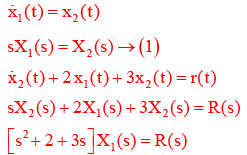
Correct answer is option 'D'. Can you explain this answer?

Verified Answer
A second – order LTI system is described by the following state ...
|
Explore Courses for Electronics and Communication Engineering (ECE) exam
|
|
Similar Electronics and Communication Engineering (ECE) Doubts


Top Courses for Electronics and Communication Engineering (ECE)View all




A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer?
Question Description
A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? for Electronics and Communication Engineering (ECE) 2025 is part of Electronics and Communication Engineering (ECE) preparation. The Question and answers have been prepared according to the Electronics and Communication Engineering (ECE) exam syllabus. Information about A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? covers all topics & solutions for Electronics and Communication Engineering (ECE) 2025 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer?.
A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? for Electronics and Communication Engineering (ECE) 2025 is part of Electronics and Communication Engineering (ECE) preparation. The Question and answers have been prepared according to the Electronics and Communication Engineering (ECE) exam syllabus. Information about A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? covers all topics & solutions for Electronics and Communication Engineering (ECE) 2025 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer?.
Solutions for A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? in English & in Hindi are available as part of our courses for Electronics and Communication Engineering (ECE).
Download more important topics, notes, lectures and mock test series for Electronics and Communication Engineering (ECE) Exam by signing up for free.
Here you can find the meaning of A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? defined & explained in the simplest way possible. Besides giving the explanation of
A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer?, a detailed solution for A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? has been provided alongside types of A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? theory, EduRev gives you an
ample number of questions to practice A second – order LTI system is described by the following state equations,Where x1 (t) and x2 (t)are the two state variables and r(t) denotes the input. The output c(t) = x1(t). The system is.a)Undamped (oscillatory)b)Under dampedc)Critically dampedd)Over dampedCorrect answer is option 'D'. Can you explain this answer? tests, examples and also practice Electronics and Communication Engineering (ECE) tests.
|
|
Explore Courses for Electronics and Communication Engineering (ECE) exam
|
|

Signup for Free!
Signup to see your scores go up within 7 days! Learn & Practice with 1000+ FREE Notes, Videos & Tests.




x
![]()
For Your Perfect Score in Electronics and Communication Engineering (ECE)
The Best you need at One Place
|
© EduRev
|
Education Revolution
|



|










Signup to see your scores
go up within 7 days!
Access 1000+ FREE Docs, Videos and Tests
Takes less than 10 seconds to signup