











Mechanical Engineering Exam > Mechanical Engineering Questions > A planar four-bar linkage mechanism with 3 re...
Start Learning for Free

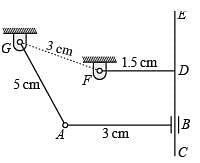
A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism is
- a)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FG
- b)a non-Grashof chain with all oscillating links
- c)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEF
- d)on the border of Grashof and non-Grashof chains with uncertain configuration(s)
Correct answer is option 'A'. Can you explain this answer?
| FREE This question is part of | Download PDF Attempt this Test |
Most Upvoted Answer
A planar four-bar linkage mechanism with 3 revolute kinematic pairs an...
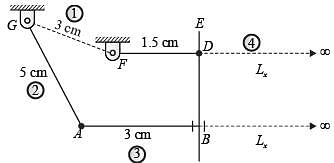
Link (1) = 3 cm → shortest
Link (2) = 5 cm
Link (3) = 3 cm + Lx → Longest
Link (4) = 1.5 cm + Lx
S + l ≤ p + q
3 + 3 = Lx ≤ 5 + 1.5 + Lx
6 ≤ 6.5
Law satisfied and shortest link is fixed → Double crank
Hence, the correct option is (A).
Attention Mechanical Engineering Students!
To make sure you are not studying endlessly, EduRev has designed Mechanical Engineering study material, with Structured Courses, Videos, & Test Series. Plus get personalized analysis, doubt solving and improvement plans to achieve a great score in Mechanical Engineering.


|
Explore Courses for Mechanical Engineering exam
|
|
Similar Mechanical Engineering Doubts


Top Courses for Mechanical EngineeringView all





A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer?
Question Description
A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? for Mechanical Engineering 2024 is part of Mechanical Engineering preparation. The Question and answers have been prepared according to the Mechanical Engineering exam syllabus. Information about A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? covers all topics & solutions for Mechanical Engineering 2024 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer?.
A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? for Mechanical Engineering 2024 is part of Mechanical Engineering preparation. The Question and answers have been prepared according to the Mechanical Engineering exam syllabus. Information about A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? covers all topics & solutions for Mechanical Engineering 2024 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer?.
Solutions for A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? in English & in Hindi are available as part of our courses for Mechanical Engineering.
Download more important topics, notes, lectures and mock test series for Mechanical Engineering Exam by signing up for free.
Here you can find the meaning of A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? defined & explained in the simplest way possible. Besides giving the explanation of
A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer?, a detailed solution for A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? has been provided alongside types of A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? theory, EduRev gives you an
ample number of questions to practice A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE . The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism isa)a Grashof chain with links AG, AB, and CDEF completely rotatable about the ground link FGb)a non-Grashof chain with all oscillating linksc)a Grashof chain with AB completely rotatable about the ground link FG, and oscillatory links AG and CDEFd)on the border of Grashof and non-Grashof chains with uncertain configuration(s)Correct answer is option 'A'. Can you explain this answer? tests, examples and also practice Mechanical Engineering tests.
|
|
Explore Courses for Mechanical Engineering exam
|
|
Suggested Free Tests
Signup for Free!
Signup to see your scores go up within 7 days! Learn & Practice with 1000+ FREE Notes, Videos & Tests.




|
© EduRev
|
Education Revolution
|



Follow Us
|








Signup to see your scores
go up within 7 days!
Access 1000+ FREE Docs, Videos and Tests
Takes less than 10 seconds to signup