Analysis of Finite Control Volumes - 1 | Fluid Mechanics for Mechanical Engineering PDF Download

We'll see the application of momentum theorem in some practical cases of inertial and non-inertial control volumes.
Inertial Control Volumes
Applications of momentum theorem for an inertial control volume are described with reference to three distinct types of practical problems, namely
- Forces acting due to internal flows through expanding or reducing pipe bends.
- Forces on stationary and moving vanes due to impingement of fluid jets.
- Jet propulsion of ship and aircraft moving with uniform velocity.
Non-inertial Control Volume
A good example of non-inertial control volume is a rocket engine which works on the principle of jet propulsion.
We shalll discuss each example seperately in the following slides.
Forces due to Flow Through Expanding or Reducing Pipe Bends
Let us consider, a fluid flow through an expander shown in Fig. 11.1a below. The expander is held in a vertical plane. The inlet and outlet velocities are given by V1 and V2 as shown in the figure. The inlet and outlet pressures are also prescribed as p1 and p2. The velocity and pressure at inlet and at outlet sections are assumed to be uniform. The problem is usually posed for the estimation of the force required at the expander support to hold it in position.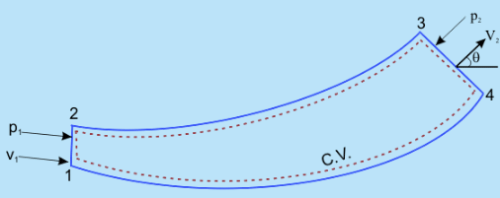
Fig 11.1a Flow of a fluid through an expander
For the solution of this type of problem, a control volume is chosen to coincide with the interior of the expander as shown in Fig. 11.1a. The control volume being constituted by areas 1-2, 2-3, 3-4, and 4-1 is shown separately in Fig.11.1b.
The external forces on the fluid over areas 2-3 and 1-4 arise due to net efflux of linear momentum through the interior surface of the expander. Let these forces be Fx and Fy. Since the control volume 1234 is stationary and at a steady state, we apply Eq.(10.18d) and have for x and y components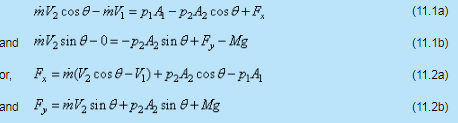
where  = mass flow rate through the expander. Analytically it can be expressed as
= mass flow rate through the expander. Analytically it can be expressed as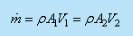
where A1 and A2 are the cross-sectional areas at inlet and outlet of the expander and the flow is considered to be incompressible.
M represents the mass of fluid contained in the expander at any instant and can be expressed as is the internal volume of the expander.
is the internal volume of the expander.
Thus, the forces Fx and Fy acting on the control volume (Fig. 11.1b) are exerted by the expander. According to Newton’s third law, the expander will experience the forces Rx (= − Fx) and Ry ( = − Fy) in the x and y directions respectively as shown in the free body diagram of the expander. in fig 11.1c.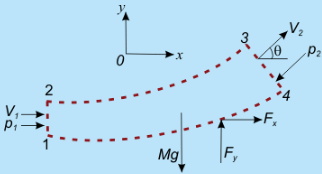
Fig 11.1b Control Volume Comprising the fluid contained in the expander at any instant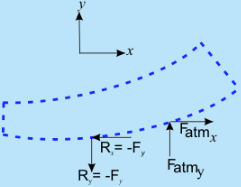
Fig 11.1c Free Body Diagram of the Expander
The expander will also experience the atmospheric pressure force on its outer surface. This is shown separately in Fig. 11.2.
Fig 11.2 Effect of atmospheric pressure on the expander
From Fig.11.2 the net x and y components of the atmospheric pressure force on the expander can be written as
The net force on the expander is therefore, (11.3a)
(11.3a) (11.3b)
(11.3b)
or,
 (11.4a)
(11.4a) (11.4b)
(11.4b)
Note: At this stage that if Fx and Fy are calculated from the Eqs (11.2a) and (11.2b) with p1 and p2 as the gauge pressures instead of the absolute ones the net forces on the expander Ex and Ey will respectively be equal to −Fxand −Fy.
Dynamic Forces on Plane Surfaces due to the Impingement of Liquid Jets
Force on a stationary surface Consider a stationary flat plate and a liquid jet of cross sectional area ”a” striking with a velocity V at an angle θ to the plate as shown in Fig. 11.3a.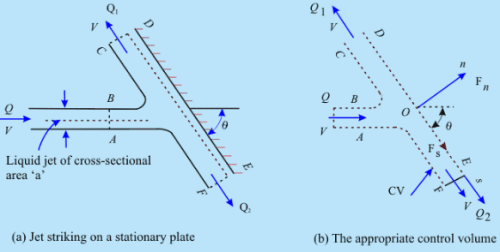
Fig 11.3 Impingement of liquid Jets on a Stationary Flat Plate
To calculate the force required to keep the plate stationary, a control volume ABCDEFA (Fig. 11.3a) is chosen so that the control surface DE coincides with the surface of the plate. The control volume is shown separately as a free body in Fig. 11.3b. Let the volume flow rate of the incoming jet be Q and be divided into Q1 and Q2 gliding along the surface (Fig. 11.3a) with the same velocity V since the pressure throughout is same as the atmospheric pressure, the plate is considered to be frictionless and the influence of a gravity is neglected (i.e. the elevation between sections CD and EF is negligible).
Coordinate axes are chosen as 0s and 0n along and perpendicular to the plate respectively. Neglecting the viscous forces. (the force along the plate to be zero),the momentum conservation of the control volume ABCDEFA in terms of s and n components can be written from Eq.(10.18d) as (11.5a)
(11.5a)
and (11.5b)
(11.5b)
where Fs and Fn are the forces acting on the control volume along 0s and 0n respectively,
From continuity,
Q = Q1 + Q2 (11.6)
With the help of Eqs (11.5a) and (11.6), we can write (11.7a)
(11.7a) (11.7b)
(11.7b)
The net force acting on the control volume due to the change in momentum of the jet by the plate is Fn along the direction "On” and is given by the Eq. (11.7b) as (11.7c)
(11.7c)
Hence, according to Newton’s third law, the force acting on the plate is (11.8)
(11.8)
If the cross-sectional area of the jet is ”a”, then the volume flow rate Q striking the plate can be written as Q = aV. Equation (11.8) then becomes (11.9)
(11.9)
Force on a moving surface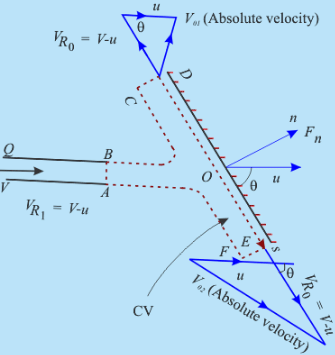
Fig 11.5 Impingement of liquid jet on a moving flat plate
If the plate in the above problem moves with a uniform velocity u in the direction of jet velocity V (Fig. 11.5). The volume of the liquid striking the plate per unit time will be (11.10)
(11.10)
The control volume ABCDEFA in the case has to move with the velocity u of the plate. Therefore we have to apply Eq. (10.18d) to calculate the forces acting on the control volume. Hence the velocities relative to the control volume will come into picture. The velocity of jet relative to the control volume at its inlet becomes VR1 = V − uPhysically, when the plate recedes away from the jet it receives a less quantity of liquid per unit time than the actual mass flow rate of liquid delivered, say by any nozzle. When u = V, Q = 0 and when u > V, Q becomes negative. This implies physically that when the plate moves away from the jet with a velocity being equal to or greater than that of the jet, the jet can never strike the plate.
Since the pressure remains same throughout, the magnitudes of the relative velocities of liquid at outlets become equal to that at inlet, provided the friction between the plate and the liquid is neglected. Moreover, for a smooth shockless flow, the liquid has to glide along the plate and hence the direction of VR0, the relative velocity of the liquid at the outlets, will be along the plate. The absolute velocities of the liquid at the outlets can be found out by adding vectorially the plate velocity u and the relative velocity of the jet V - u with respect to the plate. This is shown by the velocity triangles at the outlets (Fig. 11.5). Coordinate axes fixed to the control volume ABCDEFA are chosen as ”0s” and ”0n” along and perpendicular to the plate respectively.
The force acting on the control volume along the direction ”0s” will be zero for a frictionless flow. The net force acting on the control volume will be along ”0n” only. To calculate this force Fn, the momentum theorem with respect to the control volume ABCDEFA can be written as
Substituting Q from Eq (11.10),
Hence the force acting on the plate becomes (11.11)
(11.11)
If the plate moves with a velocity u in a direction opposite to that of V (plate moving towards the jet), the volume of liquid striking the plate per unit time will be Q = a(V + u) and, finally, the force acting on the plate would be (11.12)
(11.12)
From the comparison of the Eq. (11.9) with Eqs (11.11) and (11.12), conclusion can be drawn that for a given value of jet velocity V, the force exerted on a moving plate by the jet is either greater or lower than that exerted on a stationary plate depending upon whether the plate moves towards the jet or-away from it respectively.
The power developed due to the motion of the plate can be written (in case of the plate moving in the same direction as that of the jet) as (11.13)
(11.13)
|
56 videos|106 docs|75 tests
|
FAQs on Analysis of Finite Control Volumes - 1 - Fluid Mechanics for Mechanical Engineering
| 1. What is a finite control volume? |  |
| 2. What is the purpose of analyzing finite control volumes? | |
| 3. How is a finite control volume different from a finite element? | |
| 4. What are some applications of finite control volume analysis? | |
| 5. How is finite control volume analysis relevant to engineering exams like GATE? | |



mock tests for examination
,Exam
,Viva Questions
,practice quizzes
,Analysis of Finite Control Volumes - 1 | Fluid Mechanics for Mechanical Engineering
,study material
,Analysis of Finite Control Volumes - 1 | Fluid Mechanics for Mechanical Engineering
,Analysis of Finite Control Volumes - 1 | Fluid Mechanics for Mechanical Engineering
,ppt
,Sample Paper
,past year papers
,Important questions
,Previous Year Questions with Solutions
,MCQs
,Semester Notes
,shortcuts and tricks
,Free
,Extra Questions
,video lectures
,Summary
,Objective type Questions
;






Analysis of Finite Control Volumes - 1 Free PDF Download
Importance of Analysis of Finite Control Volumes - 1
Analysis of Finite Control Volumes - 1 Notes
Analysis of Finite Control Volumes - 1 Mechanical Engineering Questions
Study Analysis of Finite Control Volumes - 1 on the App
|
© EduRev
|
Education Revolution
|



|






