Analysis of LTI Systems with Rational System Functions | Signals and Systems - Electrical Engineering (EE) PDF Download

Continuous Rational System
Causality
For a causal LTI system, the impulse response is zero for t=0 (and thus it is right sided!) h(t) = 0 for all t<0
where H(s) is the system function (assuming system has a system function
Thus, if the region of convergence is non null, must be included in the ROC for the system to be causal.
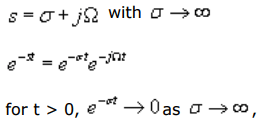
Proof: As region of convergence is not null there exist an 
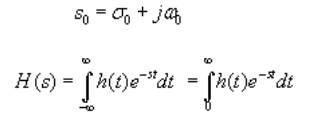
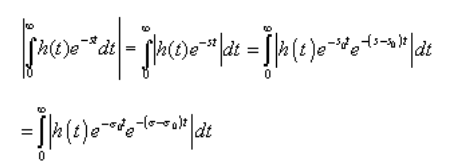
Hence H(S) is convergent for all Re(S)>Re(So)
 is inthe region and belongs to ROC
is inthe region and belongs to ROC
Necessary and sufficient condition for causality in a rational system: The region of convergence must include
The region of convergence must include
DISCRETE RATIONAL SYSTEM :
A Causal Discrete time LSI system has an impulse response h[n], this is zero for n<0 and thus it is right sided.h[n]=0 for all
n< 0 for causality system function H(z) 
Assuming H(z) has a non null ROC ,we require,
 for n > 0,
for n > 0,
thus must be included in the ROC.
Example:


STABILITY OF RATIONAL SYSTEMS:
A continous LSI system is stable if and only if its impulse response is absolutely integrable, i.e.

.
Exploring the convergence of Laplace transform of impulse response of a stable LSI system, we find that
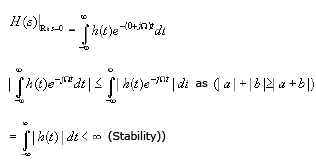
hus H(s) converges on imaginary axis ( Re(s)=0 ) So, Re(s)=0 or imaginary axis is contained in ROC of system function for all stable LSI systems.
We can also look at this from a different point of view.Impulse response being absolutely integrable implies Fourier transform converges as is nothing but Fourier transform it is also bound to converge for Re{s} = 0 Re{s} = 0 is included in its ROC.
In general, Re{s} = 0 lies in ROC is not sufficent condition to imply stability. But for rational systems Re{s} = 0 lies in ROC system is stable.
Now, we will prove the above result .
Proof for sufficiency condition :-
For any system to be stable, poles can not lie in ROC.Thus, there should not be any poles on the (imaginary axis) Re(s)=0.
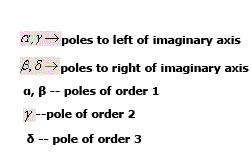
Suppose α and β are the poles of the system function H(s) where Re(α)<0 and Re( β)>0.
Now consider, inverse transform of ,  there are two choices
there are two choices
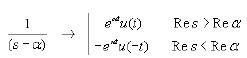
As Re{s}=0 is contained in the ROC and , the only possible option is ( to have a non-empty ROC).
Looking at inverse transform of 
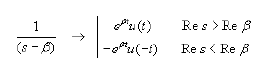
As Re{s} = 0 lies in ROC , we will have to take to be the inverse.
Thus, in a rational system, with ROC of the system function including Re(s)=0, the poles to the left of imaginary axis contribute rightsided exponentially decaying term and poles to the right of the imaginary axis contribute left-sided exponentially decaying term.
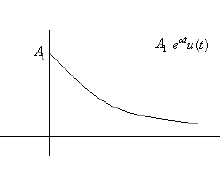
α contributes a right-sided decaying exponential
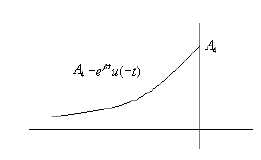
β contributes a left handed decaying exponent.
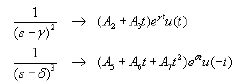
Poles to the right of imaginary axis contribute -Pβ(t)eβtu(-t), where Pβ(t) is a polynomial of degree k-1 k = order of pole at in H(s) Similarly poles to the left of imaginary axis
contribute Pα(t)eαtu(t)
The absolute integral 
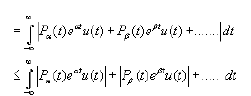
Thus the absolute integral  sum of the absolute integrals of these terms (finite number because the system function is rational) <∞
sum of the absolute integrals of these terms (finite number because the system function is rational) <∞
Therefore, the system is stable.
Later, we shall prove the theorem , that irrespective of the polynomial converges if and only if
converges if and only if  converges, in order to justify the convergence of each absolute integral.
converges, in order to justify the convergence of each absolute integral.
Rational continuous system functions
Let the system function
We can represent graphically the system function by showing all poles(zero's of D(s) ) and zero's (zero's of H(s) ) and it's ROC in splane. eg:
Complete pictorial representation of the above system function H(s) in s-plane.
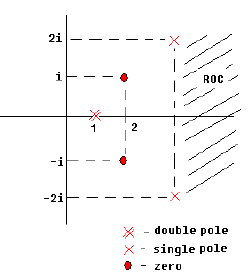
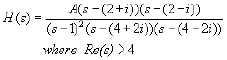
From this graph we can write the system function as
Now for stability, Re{s} = 0 should lie in ROC.
Representation of poles and zeros
Consider representation of the system function
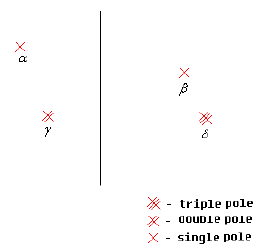
Thus H(s) can be represented as . 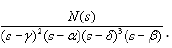
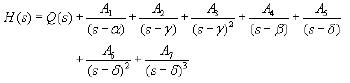
On expansion of H(s) in terms of partial fraction we would get

Recall that in a rational system, with ROC of the system function including Re(s)=0, the poles to the left of imaginary axis contribute right-sided exponentially decaying term and poles to the right of the imaginary axis contribute left-sided exponentially decaying term.
Thus, as we have seen earlier, α contributes a right handed decaying exponential and β contributes a left handed decaying exponential and the contributions of following terms in the denominator are
Theorem
Irrespective of the polynomial  converges if and only if
converges if and only if  converges.
converges.
Proof by induction:
Mathematical Induction on degree of polynomial
Base case: Suppose the statement is true for n=1 case we prove it is true for n=2 case.

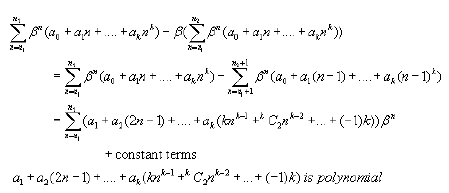
Induction step: We assume  converges , for any polynomial of degree (k-1), We proceed to prove converges for
converges , for any polynomial of degree (k-1), We proceed to prove converges for
apolynomial of degree k
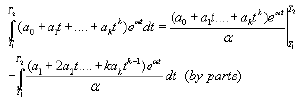
 is polynomial of degree (k-1) , by the assumption , we know
is polynomial of degree (k-1) , by the assumption , we know converges there by
converges there by  also converges.
also converges.
Hence, proved.
Theorem 2
For a discrete rational system stability implies and is implied by the unit circle in the z plane belonging to the ROC of the system function.
Proof :-
(a) For the stability of the system function If the discrete rational system is stable then
The z transform of the impulse response (or the system function ) converges for | z | = 1.
(b) For a stability to be implied by | z | =1 (the unit circle ) belonging to the ROC of the system function
A pole cannot lie on the unit circle | z | = 1 in a stable system.
Rational discrete system functions.
Considering the function

when is the pole of order 1 { ( α < 1) is the assumption } , β is a pole of order 1 (β >1) .
Now consideringthe Inverse transform of  we have,
we have,
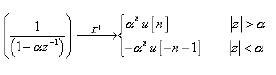
as | z | =1 is contained in the ROC and <1, hence the only possible option for inverse is .
Similarly for the function

( since β >1and | z | =1 is contained in the ROC of the function )
Therefore,
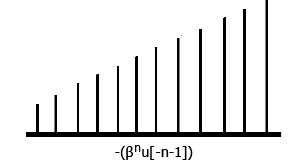
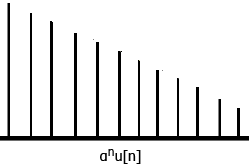
The contribution of is a right sided exponentially decaying term (possibly multiplied by a polynomial in n if the order of pole >1 ) The contribution of is a left sided exponentially decaying term ( possibly multipled by a polynomial in n if the order of the pole >1 )
Proof for stability of rational discrete systems Similar to proof for stability of rational continuous systems, the absolute sum must be convergent.
The absolute sum 

(Assuming two poles α( α<1) and β( β>1) of the order >1)
Increasing the number of poles would not make any difference to the proof .pα and p β are polynomials in n.
Now we know that  are absolutely summable. Finite number of such terms is absolutely summable and hence the Impulse response is absolutely summable.
are absolutely summable. Finite number of such terms is absolutely summable and hence the Impulse response is absolutely summable.
Therefore ,the system is stable.
The absolute summability of one sided terms of  (where p(n) is a polynomial) depends only on
(where p(n) is a polynomial) depends only on and not on the polynomial.
and not on the polynomial.
Theorem 4
We prove summability of depends on summability of .
Proof by Induction: Induction on degree of polynomial
Base case: (k=1) 
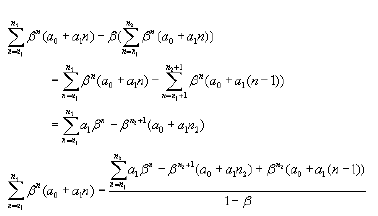
Induction step: Assume  is summable for (k-1) case .we proceed to prove it for k case.
is summable for (k-1) case .we proceed to prove it for k case.
by our assumption is summable for polynomial of degree (k-1).
THEOREM :
A neccesary and sufficient conditon for a continuos rational system to be a Causal and Stable is that all the poles must lie in the left half plane, i.e. Re (s)< 0.
THEOREM :
A neccesary and sufficient conditon for a discrete rational system to be a Causal and Stable is that all the poles must lie inside the unit circle, i.e.|z| < 1 .
System Defination of Causal Rational System and Linear Constant Coefficient Difference equation
(a) Continuos system :-The system function can be written as ,
Taking the inverse Laplace transform we have ,

(b) Discrete system :-

It is always possible to write the system function this way for a Causal rational discrete system .

Taking the inverse z-transform of the above equation we have ,
Conclusion:
In this lecture you have learnt:
Necessary and sufficient condition for causality in a continuous rational system : The region of convergence must include 
- Necessary and sufficient condition for causality in a discrete rational system: The region of convergence must include

- In general, Re{s} = 0 lies in ROC is not sufficent condition to imply stability. But for rational systems Re{s} = 0 lies in ROC system is stable.
- In a rational system, with ROC of the system function including Re(s)=0, the poles to the left of imaginary axis contribute right-sided exponentially decaying term and poles to the right of the imaginary axis contribute left-sided exponentially decaying term.
- For a discrete rational system stability implies and is implied by the unit circle in the z plane belonging to the ROC of the system function.
|
41 videos|70 docs|33 tests
|
FAQs on Analysis of LTI Systems with Rational System Functions - Signals and Systems - Electrical Engineering (EE)
| 1. What is an LTI system? |  |
| 2. How can LTI systems be represented mathematically? | |
| 3. What is the importance of analyzing LTI systems with rational system functions? | |
| 4. How can we determine the stability of an LTI system with a rational system function? | |
| 5. What are some practical applications of analyzing LTI systems with rational system functions? | |



Previous Year Questions with Solutions
,shortcuts and tricks
,Objective type Questions
,Viva Questions
,Analysis of LTI Systems with Rational System Functions | Signals and Systems - Electrical Engineering (EE)
,past year papers
,video lectures
,study material
,Summary
,practice quizzes
,Sample Paper
,Analysis of LTI Systems with Rational System Functions | Signals and Systems - Electrical Engineering (EE)
,Free
,Semester Notes
,mock tests for examination
,ppt
,Important questions
,Extra Questions
,MCQs
,Analysis of LTI Systems with Rational System Functions | Signals and Systems - Electrical Engineering (EE)
,Exam
;


Analysis of LTI Systems with Rational System Functions Free PDF Download
Importance of Analysis of LTI Systems with Rational System Functions
Analysis of LTI Systems with Rational System Functions Notes
Analysis of LTI Systems with Rational System Functions Electrical Engineering (EE) Questions
Study Analysis of LTI Systems with Rational System Functions on the App
|
© EduRev
|
Education Revolution
|



|





