Introduction
We classify dynamical systems by how their signals vary with time and value. The three broad classes are continuous-time systems, discrete-time systems and hybrid systems. Continuous-time systems process signals that are defined for every instant of time. Discrete-time systems process signals defined only at discrete instants. Hybrid systems contain both continuous and discrete components: part of the signal chain is continuous while another part is discrete.
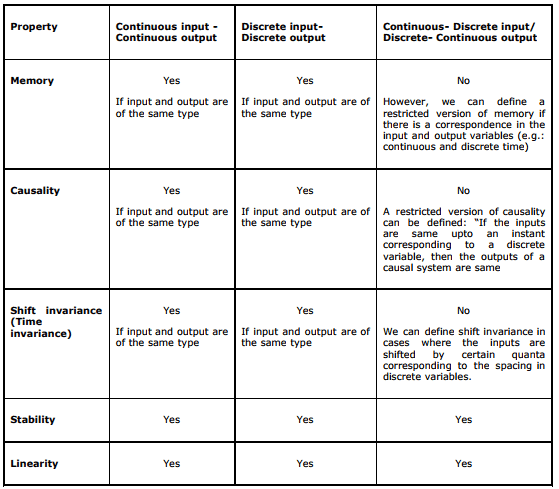
Understanding which properties apply to which class is important when analysing or designing systems. The same property (for example, stability) may be meaningful for continuous-time and discrete-time systems, while some concepts (for example, the usual notion of memory) require modification for hybrid systems.
Examples of different classes of systems
| Continuous-time systems | Discrete-time systems |
|---|
Continuous → Continuous- Tree swaying in the wind: the wind (speed, direction) is a continuous-time input and the motion of branches is a continuous-time output.
- Analogue RC low-pass filter: continuous voltage in gives filtered continuous voltage out.
| Discrete → Discrete- Logic circuits: discrete logic inputs (0/1) are processed to give discrete logic outputs.
- Digital finite-state machines used in controllers and communication protocols.
|
Hybrid (Continuous → Discrete)- Eye: the retina receives a continuous image but sends a discrete (spike or pixel-mapped) representation to the brain.
- Microphone and sampler: a microphone senses a continuous acoustic waveform and a sampler converts the continuous-time signal into discrete-time samples. Samplers form an important class of systems in digital signal processing.
| Hybrid (Discrete → Continuous)- Brain: receives discrete signals from sensory organs and constructs a smooth perceptual experience.
- Computer sound playback: digital audio (discrete samples) is converted by a digital-to-analogue converter and smoothing circuitry to produce a continuous waveform for speakers.
|
Properties of systems - overview
The following is a list of common properties that a system can have. These are not mandatory: a given system may or may not satisfy any particular property. The definitions that follow are stated for clarity first in a general form and then with comments specific to continuous-time, discrete-time and hybrid systems where relevant.
Key properties
- Linearity: A system is linear if it obeys the principles of superposition and homogeneity. That is, for inputs x1 and x2 and scalars a and b, the system response satisfies y[a x1 + b x2] = a y[x1] + b y[x2]. Linearity is the basis for many powerful analysis tools (for example, using convolution and frequency-domain methods).
- Time-invariance (Shift invariance): A system is time-invariant if a time shift in the input causes an identical time shift in the output. For continuous time, y(t - t0) corresponds to x(t - t0). For discrete time, x[n - n0] produces y[n - n0]. Time-invariance makes analysis simpler and allows use of impulse responses and convolution.
- Causality: A system is causal if the output at any time depends only on the present and past inputs, not on future inputs. For continuous time, y(t0) depends only on x(τ) for τ ≤ t0. For discrete time, y[n0] depends only on x[k] for k ≤ n0. Causality is essential for real-time physical systems.
- Memoryless (Static): A system is memoryless if the output at each time depends only on the input at that same time. Memoryless systems have no dependence on past or future input values. For hybrid systems, the notion of memory must be adapted because inputs may change domain (continuous vs discrete).
- Bounded-Input Bounded-Output (BIBO) Stability: A system is BIBO stable if every bounded input produces a bounded output. For continuous time, if |x(t)| ≤ Mx < ∞ for all t then |y(t)| ≤ My < ∞ for all t. for discrete time, the same definition applies using sequences. for linear time-invariant (lti) systems, bibo stability is equivalent to the impulse response being absolutely integrable (continuous time) or absolutely summable (discrete )
- Invertibility: A system is invertible if a unique input can be recovered from its output by another system (the inverse). Invertibility requires the mapping from input to output to be one-to-one.
- Determinism: A deterministic system maps each input (and initial condition) to a unique output. Non-deterministic systems can produce different outputs for the same input, perhaps due to random processes or nondeterministic internal choices.
- Periodicity: A system is periodic if it produces periodic outputs for periodic inputs of certain periods; in particular, a system that preserves periodicity with the same period is often described as period preserving.
- Linearity and Time-Invariance combined: LTI systems: LTI systems (linear and time-invariant) form a crucial class since they allow representation by convolution with an impulse response and analysis by Fourier and Laplace transforms (continuous time) or z-transform and discrete-time Fourier transform (discrete time).
- Stochastic (Random) properties: Systems that process random inputs are often characterised by statistical properties such as mean, autocorrelation and power spectral density of input and output. Linearity combined with knowledge of input statistics makes prediction and filtering possible (for example, Wiener filtering).
- Continuity of mapping: For some analyses, it is useful to know whether small changes in input produce small changes in output (continuity or Lipschitz continuity). This property matters in numerical implementations and stability analysis.
Remarks specific to discrete and hybrid systems
- Discrete-time vs discrete-valued: A discrete-time system operates on signals defined only at discrete instants (for example, x[n]). A discrete-valued (or digital) system has signals that take values from a discrete set (for example, quantised amplitudes). Both concepts are independent: a signal can be discrete in time but continuous in amplitude, or discrete in amplitude but continuous in time.
- Sampling and aliasing: When converting a continuous-time signal to discrete time, a sampler extracts samples, typically at uniform intervals. The sampling process must respect the sampling theorem to avoid aliasing when the original signal has frequency content above half the sampling rate. The sampler is a fundamental hybrid system that connects continuous and discrete domains.
- Reconstruction (Interpolation / Hold): Converting discrete samples back to a continuous waveform requires interpolation or a reconstruction filter. Digital-to-analogue converters commonly use a zero-order hold followed by smoothing to obtain a continuous output from discrete samples.
- Memory in hybrid systems: Memory for hybrid systems may refer to stored samples, buffer states, or continuous-time integrator states. The usual notion of memoryless versus memory must be stated with respect to the appropriate domain (continuous or discrete) of the signal at the interface.
- Implementation constraints: Discrete systems are often implemented in digital hardware or software and are subject to quantisation, finite-word-length effects, and computation delay. These practical factors affect stability, accuracy and realisability.
How these properties are used
- Analysis: Properties such as linearity and time-invariance allow the use of convolution, impulse response, and transform methods (Fourier, Laplace, z-transform) to find the system output for arbitrary inputs.
- Design: Stability and causality are primary design constraints for physical systems. Invertibility and minimal memory help in designing equalizers and controllers.
- Implementation: For hybrid systems, sampling rate selection, anti-aliasing filters, and reconstruction filters are design choices that connect theory to practical audio, communication and control systems.
- Applications: Knowledge of system properties is used in signal filtering, communications (modulation/demodulation), control system design, image processing, biomedical signal analysis and many other fields.
Examples revisited with properties
- Logic circuits: typically discrete in time and amplitude, often memoryless at the gate level but can form state machines with memory; causality and determinism are usually satisfied.
- Sampler followed by digital filter and DAC: the sampler produces a discrete-time sequence; a digital filter (discrete-time, possibly LTI) processes samples; the DAC and smoothing produce a continuous output. Stability and correct sampling (to avoid aliasing) are key design considerations.
- RC filter (analogue): continuous-time LTI, BIBO stable if component values finite, causal and may be memoryless only in trivial cases (most filters have memory).
Summary
Systems are classified by how their inputs and outputs vary in time and value: continuous-time, discrete-time and hybrid. Each class can possess several properties such as linearity, time-invariance, causality, memorylessness and BIBO stability. Understanding which properties apply and how they are defined in each domain is essential for correct analysis, design and practical implementation of real systems. Samplers and reconstruction blocks are central when moving between continuous and discrete domains and require careful handling of aliasing and filtering.