Electrical Engineering (EE) Exam > Electrical Engineering (EE) Notes > Control Systems > Detailed Notes: Closed Loop System
Detailed Notes: Closed Loop System | Control Systems - Electrical Engineering (EE) PDF Download
Introduction
- The ability of a feedback system to modify the natural dynamics of a system, and in particular to stabilise it is the basic architecture of any closed-loop system. But what are the advantages (and disadvantages) of closed-loop feedback control over any other type of control architecture.
- Systems in which the output quantity has no effect upon the input to the control process are called open-loop control systems, and that open-loop systems are just that, open ended non-feedback systems.
- But the goal of any electrical or electronic control system is to measure, monitor, and control a process and one way in which we can accurately control the process is by monitoring its output and “feeding” some of it back to compare the actual output with the desired output so as to reduce the error and if disturbed, bring the output of the system back to the original or desired response.
- The quantity of the output being measured is called the “feedback signal”, and the type of control system which uses feedback signals to both control and adjust itself is called a Close-loop System.
- A Closed-loop Control System, also known as a feedback control system is a control system which uses the concept of an open loop system as its forward path but has one or more feedback loops (hence its name) or paths between its output and its input. The reference to “feedback”, simply means that some portion of the output is returned “back” to the input to form part of the systems excitation.
- Closed-loop systems are designed to automatically achieve and maintain the desired output condition by comparing it with the actual condition. It does this by generating an error signal which is the difference between the output and the reference input. In other words, a “closed-loop system” is a fully automatic control system in which its control action is dependent on the output in some way.
- So for example, consider our electric clothes dryer from the previous Open-loop system tutorial. Suppose we now use a sensor or transducer (input device) to continually monitor the temperature or dryness of the clothes and feed a signal relating to the dryness back to the controller as shown below.
Closed-loop Control
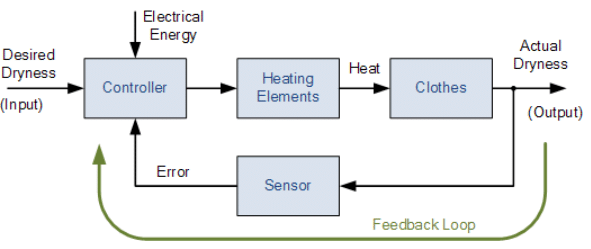
- This sensor would monitor the actual dryness of the clothes and compare it with (or subtract it from) the input reference. The error signal (error = required dryness – actual dryness) is amplified by the controller, and the controller output makes the necessary correction to the heating system to reduce any error. For example if the clothes are too wet the controller may increase the temperature or drying time. Likewise, if the clothes are nearly dry it may reduce the temperature or stop the process so as not to overheat or burn the clothes, etc.
- Then the closed-loop configuration is characterised by the feedback signal, derived from the sensor in our clothes drying system. The magnitude and polarity of the resulting error signal, would be directly related to the difference between the required dryness and actual dryness of the clothes.
- Also, because a closed-loop system has some knowledge of the output condition, (via the sensor) it is better equipped to handle any system disturbances or changes in the conditions which may reduce its ability to complete the desired task.
- For example, as before, the dryer door opens and heat is lost. This time the deviation in temperature is detected by the feedback sensor and the controller self-corrects the error to maintain a constant temperature within the limits of the preset value. Or possibly stops the process and activates an alarm to inform the operator.
- As we can see, in a closed-loop control system the error signal, which is the difference between the input signal and the feedback signal (which may be the output signal itself or a function of the output signal), is fed to the controller so as to reduce the systems error and bring the output of the system back to a desired value. In our case the dryness of the clothes. Clearly, when the error is zero the clothes are dry.
- The term Closed-loop control always implies the use of a feedback control action in order to reduce any errors within the system, and its “feedback” which distinguishes the main differences between an open-loop and a closed-loop system.The accuracy of the output thus depends on the feedback path, which in general can be made very accurate and within electronic control systems and circuits, feedback control is more commonly used than open-loop or feed forward control.
- Closed-loop systems have many advantages over open-loop systems. The primary advantage of a closed-loop feedback control system is its ability to reduce a system’s sensitivity to external disturbances, for example opening of the dryer door, giving the system a more robust control as any changes in the feedback signal will result in compensation by the controller.
Then we can define the main characteristics of Closed-loop Control as being:
- To reduce errors by automatically adjusting the systems input.
- To improve stability of an unstable system.
- To increase or reduce the systems sensitivity.
- To enhance robustness against external disturbances to the process.
- To produce a reliable and repeatable performance.
Whilst a good closed-loop system can have many advantages over an open-loop control system, its main disadvantage is that in order to provide the required amount of control, a closed-loop system must be more complex by having one or more feedback paths. Also, if the gain of the controller is too sensitive to changes in its input commands or signals it can become unstable and start to oscillate as the controller tries to over-correct itself, and eventually something would break. So we need to “tell” the system how we want it to behave within some pre-defined limits.
Closed-loop Summing Points
- For a closed-loop feedback system to regulate any control signal, it must first determine the error between the actual output and the desired output. This is achieved using a summing point, also referred to as a comparison element, between the feedback loop and the systems input. These summing points compare a systems set point to the actual value and produce a positive or negative error signal which the controller responds too. where: Error = Set point – Actual
 The symbol used to represent a summing point in closed-loop systems block-diagram is that of a circle with two crossed lines as shown. The summing point can either add signals together in which a Plus ( + ) symbol is used showing the device to be a “summer” (used for positive feedback), or it can subtract signals from each other in which case a Minus ( − ) symbol is used showing that the device is a “comparator” (used for negative feedback) as shown.
The symbol used to represent a summing point in closed-loop systems block-diagram is that of a circle with two crossed lines as shown. The summing point can either add signals together in which a Plus ( + ) symbol is used showing the device to be a “summer” (used for positive feedback), or it can subtract signals from each other in which case a Minus ( − ) symbol is used showing that the device is a “comparator” (used for negative feedback) as shown.
Summing Point Types

- Note that summing points can have more than one signal as inputs either adding or subtracting but only one output which is the algebraic sum of the inputs. Also the arrows indicate the direction of the signals. Summing points can be cascaded together to allow for more input variables to be summed at a given point.

Closed-loop System Transfer Function
- The Transfer Function of any electrical or electronic control system is the mathematical relationship between the systems input and its output, and hence describes the behaviour of the system. Note also that the ratio of the output of a particular device to its input represents its gain. Then we can correctly say that the output is always the transfer function of the system times the input. Consider the closed-loop system below.
Typical Closed-loop System Representation
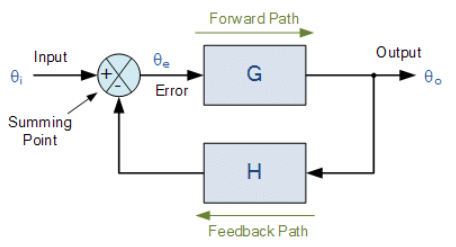
- Where: block G represents the open-loop gains of the controller or system and is the forward path, and block H represents the gain of the sensor, transducer or measurement system in the feedback path.
- To find the transfer function of the closed-loop system above, we must first calculate the output signal θo in terms of the input signal θi. To do so, we can easily write the equations of the given block-diagram as follows.
- The output from the system is equal to: Output = G x Error
- Note that the error signal, θe is also the input to the feed-forward block: G
- The output from the summing point is equal to: Error = Input – H x Output
- If H = 1 (unity feedback) then:
- The output from the summing point will be: Error (θe) = Input – Output
- Eliminating the error term, then:
- The output is equal to: Output = G x (Input – H x Output)
- Therefore: G x Input = Output + G x H x Output
- Rearranging the above gives us the closed-loop transfer function of:
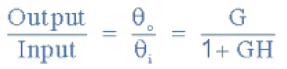
- The above equation for the transfer function of a closed-loop system shows a Plus ( + ) sign in the denominator representing negative feedback. With a positive feedback system, the denominator will have a Minus ( − ) sign and the equation becomes: 1 – GH.
- We can see that when H = 1 (unity feedback) and G is very large, the transfer function approaches unity as:
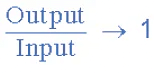
- Also, as the systems steady state gain G decreases, the expression of: G/(1 + G) decreases much more slowly. In other words, the system is fairly insensitive to variations in the systems gain represented by G, and which is one of the main advantages of a closed-loop system.
Multi-loop Closed-loop System
- Whilst our example above is of a single input, single output closed-loop system, the basic transfer function still applies to more complex multi-loop systems. Most practical feedback circuits have some form of multiple loop control, and for a multi-loop configuration the transfer function between a controlled and a manipulated variable depends on whether the other feedback control loops are open or closed.
- Consider the multi-loop system below.
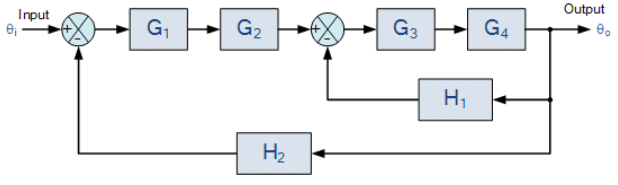
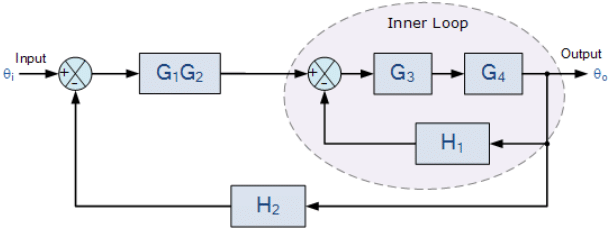
- Any cascaded blocks such as G1 and G2 can be reduced, as well as the transfer function of the inner loop as shown.
- After further reduction of the blocks we end up with a final block diagram which resembles that of the previous single-loop closed-loop system.
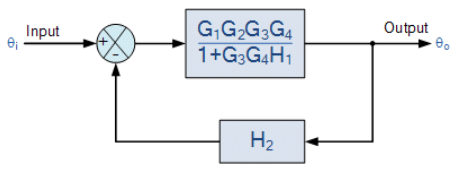
- And the transfer function of this multi-loop system becomes:

- Then we can see that even complex multi-block or multi-loop block diagrams can be reduced to give one single block diagram with one common system transfer function.
Closed-loop Motor Control
- So how can we use Closed-loop Systems in Electronics. Well consider our DC motor controller from the previous open-loop tutorial. If we connected a speed measuring transducer, such as a tachometer to the shaft of the DC motor, we could detect its speed and send a signal proportional to the motor speed back to the amplifier. A tachometer, also known as a tacho-generator is simply a permanent-magnet DC generator which gives a DC output voltage proportional to the speed of the motor.
- Then the position of the potentiometers slider represents the input, θi which is amplified by the amplifier (controller) to drive the DC motor at a set speed N representing the output, θo of the system, and the tachometer T would be the closed-loop back to the controller. The difference between the input voltage setting and the feedback voltage level gives the error signal as shown.
Motor Control
- Any external disturbances to the closed-loop motor control system such as the motors load increasing would create a difference in the actual motor speed and the potentiometer input set point.
- This difference would produce an error signal which the controller would automatically respond too adjusting the motors speed. Then the controller works to minimize the error signal, with zero error indicating actual speed which equals set point.
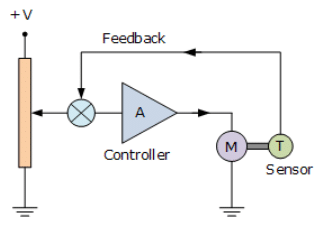
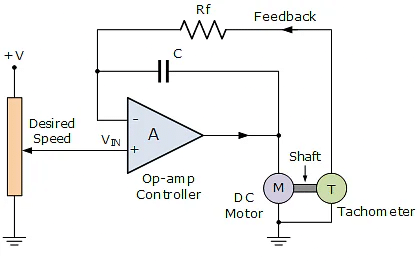
- Electronically, we could implement such a simple closed-loop tachometer-feedback motor control circuit using an operational amplifier (op-amp) for the controller as shown.
Motor Controller Circuit
- This simple closed-loop motor controller can be represented as a block diagram as shown.
 |
Download the notes
Detailed Notes: Closed Loop System
|
Download as PDF |
Download as PDF
Block Diagram for the Feedback Controller
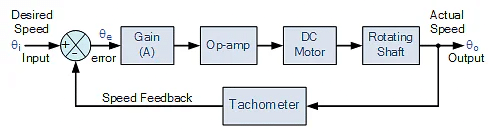
- A closed-loop motor controller is a common means of maintaining a desired motor speed under varying load conditions by changing the average voltage applied to the input from the controller. The tachometer could be replaced by an optical encoder or Hall-effect type positional or rotary sensor.
 |
Take a Practice Test
Test yourself on topics from Electrical Engineering (EE) exam
|
Practice Now |
Practice Now
Summary
- Electronic control system with one or more feedback paths is called a Closed-loop System. Closed-loop control systems are also called “feedback control systems” are very common in process control and electronic control systems. Feedback systems have part of their output signal “fed back” to the input for comparison with the desired set point condition. The type of feedback signal can result either in positive feedback or negative feedback.
- In a closed-loop system, a controller is used to compare the output of a system with the required condition and convert the error into a control action designed to reduce the error and bring the output of the system back to the desired response. Then closed-loop control systems use feedback to determine the actual input to the system and can have more than one feedback loop.
- Closed-loop control systems have many advantages over open-loop systems. One advantage is the fact that the use of feedback makes the system response relatively insensitive to external disturbances and internal variations in system parameters such as temperature. It is thus possible to use relatively inaccurate and inexpensive components to obtain the accurate control of a given process or plant.
- However, system stability can be a major problem especially in badly designed closed-loop systems as they may try to over-correct any errors which could cause the system to loss control and oscillate.
The document Detailed Notes: Closed Loop System | Control Systems - Electrical Engineering (EE) is a part of the Electrical Engineering (EE) Course Control Systems.
All you need of Electrical Engineering (EE) at this link: Electrical Engineering (EE)
|
54 videos|83 docs|40 tests
|
About this Document

4.66/5
Rating

Apr 19, 2025
Last updated
Document Description: Detailed Notes: Closed Loop System for Electrical Engineering (EE) 2025 is part of Control Systems preparation.
The notes and questions for Detailed Notes: Closed Loop System have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Detailed Notes: Closed Loop System covers topics
like Introduction and Detailed Notes: Closed Loop System Example, for Electrical Engineering (EE) 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Detailed Notes: Closed Loop System.
Introduction of Detailed Notes: Closed Loop System in English is available as part of our Control Systems
for Electrical Engineering (EE) & Detailed Notes: Closed Loop System in Hindi for Control Systems course.
Download more important topics related with notes, lectures and mock test series for Electrical Engineering (EE)
Exam by signing up for free. Electrical Engineering (EE): Detailed Notes: Closed Loop System | Control Systems - Electrical Engineering (EE)
Description
Full syllabus notes, lecture & questions for Detailed Notes: Closed Loop System | Control Systems - Electrical Engineering (EE) - Electrical Engineering (EE) | Plus excerises question with solution to help you revise complete syllabus for Control Systems | Best notes, free PDF download
Information about Detailed Notes: Closed Loop System
In this doc you can find the meaning of Detailed Notes: Closed Loop System defined & explained in the simplest way possible. Besides explaining types of
Detailed Notes: Closed Loop System theory, EduRev gives you an ample number of questions to practice Detailed Notes: Closed Loop System tests, examples and also practice Electrical Engineering (EE)
tests

Related Searches
Objective type Questions
,mock tests for examination
,Detailed Notes: Closed Loop System | Control Systems - Electrical Engineering (EE)
,MCQs
,Important questions
,Sample Paper
,Detailed Notes: Closed Loop System | Control Systems - Electrical Engineering (EE)
,video lectures
,ppt
,past year papers
,Exam
,Summary
,Detailed Notes: Closed Loop System | Control Systems - Electrical Engineering (EE)
,shortcuts and tricks
,Viva Questions
,Semester Notes
,study material
,practice quizzes
,Free
,Extra Questions
,Previous Year Questions with Solutions
;


Additional Information about Detailed Notes: Closed Loop System for Electrical Engineering (EE) Preparation
Detailed Notes: Closed Loop System Free PDF Download
The Detailed Notes: Closed Loop System is an invaluable resource that delves deep into the core of the Electrical Engineering (EE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Detailed Notes: Closed Loop System now and kickstart your journey towards success in the Electrical Engineering (EE) exam.
Importance of Detailed Notes: Closed Loop System
The importance of Detailed Notes: Closed Loop System cannot be overstated, especially for Electrical Engineering (EE) aspirants.
This document holds the key to success in the Electrical Engineering (EE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Detailed Notes: Closed Loop System
Detailed Notes: Closed Loop System Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Detailed Notes: Closed Loop System.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Detailed Notes: Closed Loop System Notes on EduRev are your ultimate resource for success.
Detailed Notes: Closed Loop System Electrical Engineering (EE) Questions
The "Detailed Notes: Closed Loop System Electrical Engineering (EE) Questions" guide is a valuable resource for all aspiring students preparing for the
Electrical Engineering (EE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Detailed Notes: Closed Loop System on the App
Students of Electrical Engineering (EE) can study Detailed Notes: Closed Loop System alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Detailed Notes: Closed Loop System,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Detailed Notes: Closed Loop System is prepared as per the latest Electrical Engineering (EE) syllabus.
|
© EduRev
|
Education Revolution
|



|






Signup to see your scores
go up
within 7 days!
within 7 days!
Takes less than 10 seconds to signup