











Electronics and Communication Engineering (ECE) Exam > Electronics and Communication Engineering (ECE) Questions > A control system has input r(t) and output c(...
Start Learning for Free
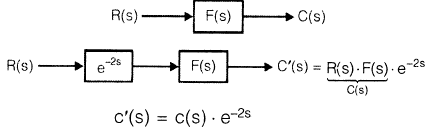
A control system has input r(t) and output c(t). If the input is first passed through a block
whose transfer function is a-2s and then applied to the system, the modified output will be
- a)c(t — 2) u(t — 2)
- b)c(t — 2) u(t)
- c)c(t) u(t — 2)
- d)None
Correct answer is option 'A'. Can you explain this answer?

Verified Answer
A control system has input r(t) and output c(t). If the input is first...
Most Upvoted Answer
A control system has input r(t) and output c(t). If the input is first...
Transfer function and Laplace Transform:
In control systems, the transfer function is a mathematical representation of the relationship between the input and output of a system. It is usually denoted by H(s), where 's' represents the complex frequency variable. The Laplace Transform is a mathematical tool used to analyze dynamic systems in the frequency domain.
Given Block Transfer Function:
The given block has a transfer function of a-2s. This means that when the Laplace Transform of the input signal r(t) is taken, it is multiplied by a-2s.
Modified Output:
When the input signal r(t) is passed through the given block, the Laplace Transform of the modified output signal c(t) can be calculated. Let's denote the Laplace Transform of c(t) as C(s).
Laplace Transform of the Input Signal:
The Laplace Transform of the input signal r(t) is denoted as R(s).
Effect of the Block Transfer Function on the Input Signal:
When the input signal R(s) is multiplied by a-2s (block transfer function), the resulting Laplace Transform is A-2sR(s).
Modified Output Signal:
The modified output signal C(s) can be obtained by multiplying the Laplace Transform of the input signal R(s) by the block transfer function a-2s. Therefore, C(s) = A-2sR(s).
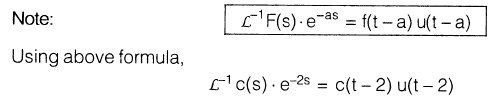
Inverse Laplace Transform:
To obtain the modified output signal c(t), the inverse Laplace Transform of C(s) needs to be taken. Since the Laplace Transform of a signal represents its frequency domain representation, the inverse Laplace Transform brings the signal back to the time domain.
Modified Output Signal in Time Domain:
Taking the inverse Laplace Transform of C(s) = A-2sR(s), we get the modified output signal c(t) = a(t - 2)u(t - 2), where a(t - 2) represents a delayed version of the original signal by 2 units of time, and u(t - 2) represents the unit step function that accounts for the delay.
Correct Answer:
Therefore, the correct answer is option 'A' - c(t - 2)u(t - 2). The modified output signal c(t) is a delayed version of the original signal r(t) by 2 units of time, and it is multiplied by the unit step function to account for the delay.
In control systems, the transfer function is a mathematical representation of the relationship between the input and output of a system. It is usually denoted by H(s), where 's' represents the complex frequency variable. The Laplace Transform is a mathematical tool used to analyze dynamic systems in the frequency domain.
Given Block Transfer Function:
The given block has a transfer function of a-2s. This means that when the Laplace Transform of the input signal r(t) is taken, it is multiplied by a-2s.
Modified Output:
When the input signal r(t) is passed through the given block, the Laplace Transform of the modified output signal c(t) can be calculated. Let's denote the Laplace Transform of c(t) as C(s).
Laplace Transform of the Input Signal:
The Laplace Transform of the input signal r(t) is denoted as R(s).
Effect of the Block Transfer Function on the Input Signal:
When the input signal R(s) is multiplied by a-2s (block transfer function), the resulting Laplace Transform is A-2sR(s).
Modified Output Signal:
The modified output signal C(s) can be obtained by multiplying the Laplace Transform of the input signal R(s) by the block transfer function a-2s. Therefore, C(s) = A-2sR(s).
Inverse Laplace Transform:
To obtain the modified output signal c(t), the inverse Laplace Transform of C(s) needs to be taken. Since the Laplace Transform of a signal represents its frequency domain representation, the inverse Laplace Transform brings the signal back to the time domain.
Modified Output Signal in Time Domain:
Taking the inverse Laplace Transform of C(s) = A-2sR(s), we get the modified output signal c(t) = a(t - 2)u(t - 2), where a(t - 2) represents a delayed version of the original signal by 2 units of time, and u(t - 2) represents the unit step function that accounts for the delay.
Correct Answer:
Therefore, the correct answer is option 'A' - c(t - 2)u(t - 2). The modified output signal c(t) is a delayed version of the original signal r(t) by 2 units of time, and it is multiplied by the unit step function to account for the delay.
|
Explore Courses for Electronics and Communication Engineering (ECE) exam
|
|
Similar Electronics and Communication Engineering (ECE) Doubts


Top Courses for Electronics and Communication Engineering (ECE)View all




Top Courses for Electronics and Communication Engineering (ECE)

Question Description
A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? for Electronics and Communication Engineering (ECE) 2025 is part of Electronics and Communication Engineering (ECE) preparation. The Question and answers have been prepared according to the Electronics and Communication Engineering (ECE) exam syllabus. Information about A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? covers all topics & solutions for Electronics and Communication Engineering (ECE) 2025 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer?.
A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? for Electronics and Communication Engineering (ECE) 2025 is part of Electronics and Communication Engineering (ECE) preparation. The Question and answers have been prepared according to the Electronics and Communication Engineering (ECE) exam syllabus. Information about A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? covers all topics & solutions for Electronics and Communication Engineering (ECE) 2025 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer?.
Solutions for A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? in English & in Hindi are available as part of our courses for Electronics and Communication Engineering (ECE).
Download more important topics, notes, lectures and mock test series for Electronics and Communication Engineering (ECE) Exam by signing up for free.
Here you can find the meaning of A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? defined & explained in the simplest way possible. Besides giving the explanation of
A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer?, a detailed solution for A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? has been provided alongside types of A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? theory, EduRev gives you an
ample number of questions to practice A control system has input r(t) and output c(t). If the input is first passed through a blockwhose transfer function is a-2s and then applied to the system, the modified output will bea)c(t — 2) u(t — 2)b)c(t — 2) u(t)c)c(t) u(t — 2)d)NoneCorrect answer is option 'A'. Can you explain this answer? tests, examples and also practice Electronics and Communication Engineering (ECE) tests.
|
|
Explore Courses for Electronics and Communication Engineering (ECE) exam
|
|

Signup to solve all Doubts
Signup to see your scores go up within 7 days! Learn & Practice with 1000+ FREE Notes, Videos & Tests.
x
![]()
For Your Perfect Score in Electronics and Communication Engineering (ECE)
The Best you need at One Place
|
© EduRev
|
Education Revolution
|



|









Signup on EduRev and stay on top of your study goals
10M+ students crushing their study goals daily