Relative Velocity | Physics Class 11 - NEET PDF Download

What is Relative Velocity?
The velocity of an object only has meaning when it is expressed relative to a set of axes or a frame of reference.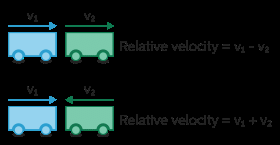
We usually consider the motion of objects relative to the Earth, but since the Earth is orbiting the Sun and the Sun is moving through the Galaxy, this is a purely arbitrary concept. When dealing with more than one body in motion, the problem becomes complex — consider the difficulties in sending the space probe Giotto to rendezvous with Halley's Comet many millions of miles away!
We should always specify the frame of reference relative to which an object is moving.
The velocity of one body relative to another is called its relative velocity.
Consider the case where both bodies are moving relative to a third body. A simple example is when the motions of both bodies are in the same straight line — for instance, two cars travelling along a motorway. If both cars are travelling in the same direction, one at 25 ms-1 and the other at 35 ms-1, then their relative velocity is 10 ms-1 (found by vector subtraction).
If they are moving in opposite directions, however, the relative velocity of one car with respect to the other is 60 ms-1 (See Figure 1).
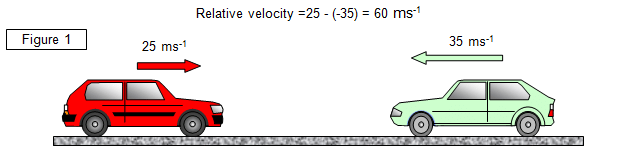
What we are effectively doing is considering one car to be at rest and finding the velocity of the other car in that frame of reference. To do this, we add the negative of the velocity of one car to both cars' velocities. This effectively brings one car to rest, and we then consider the velocity of the other car relative to it.
The situation becomes a little more complex when the motion of the two objects is not along the same straight line. Consider the case shown in Figure 2.
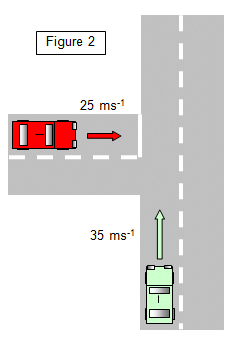
Here the two cars are still moving at the same speeds but this time at right angles to each other as they approach a junction.
The relative velocity is found using a vector triangle.
If we add the negative of the velocity of the red car (−25 ms-1) to both the velocity of the red car and the green car, we can imagine the red car to be at rest and then find the velocity of the green car relative to it (See Figure 3).
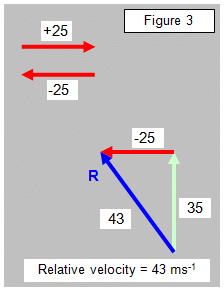
This is most easily done by drawing the vector diagram. The resultant shown by the vector R is the velocity of the green car relative to the red car. In our example, the velocity of the green car relative to the red car is 43 ms-1 at a direction of 325o.
Think about this result and see if it matches your common-sense view of how you would see the green car moving if you were in the red car. It would seem to be moving up the page and towards the left, which fits the result exactly!
Relative motion at angles other than 90o
We will now consider the case where the cars are not moving at right angles to each other.
In fact, we will not consider cars but two aeroplanes shown in Figure 4 (a).
To find the velocity of plane A relative to plane B, we must 'make plane B stationary'. We do this by adding the negative of plane B's velocity to both planes. If we were on plane B, it would be like making that plane stop, and we would then see plane A moving relative to us. This is shown in Figure 4(b).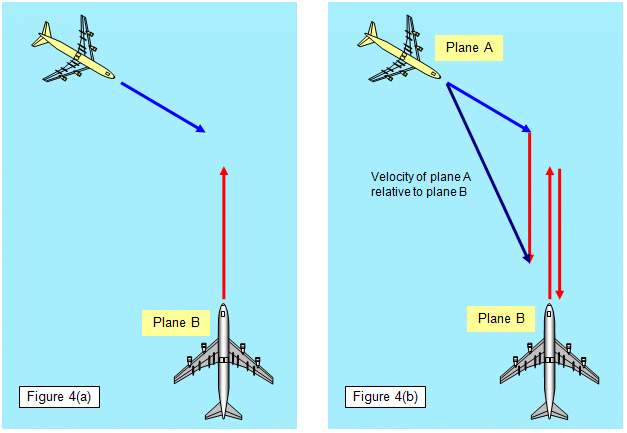
|
96 videos|367 docs|98 tests
|
FAQs on Relative Velocity - Physics Class 11 - NEET
| 1. What is relative velocity? |  |
| 2. How is relative velocity calculated? | |
| 3. Can relative velocity be negative? | |
| 4. Why is relative velocity important in physics? | |
| 5. How does relative velocity affect collisions? | |



video lectures
,Sample Paper
,study material
,past year papers
,Free
,practice quizzes
,Important questions
,Extra Questions
,Viva Questions
,Relative Velocity | Physics Class 11 - NEET
,Summary
,Relative Velocity | Physics Class 11 - NEET
,Objective type Questions
,Exam
,Semester Notes
,Relative Velocity | Physics Class 11 - NEET
,Previous Year Questions with Solutions
,ppt
,MCQs
,mock tests for examination
,shortcuts and tricks
;


Relative Velocity Free PDF Download
Importance of Relative Velocity
Relative Velocity Notes
Relative Velocity NEET Questions
Study Relative Velocity on the App
|
© EduRev
|
Education Revolution
|



|





