
Best Study Material for Electrical Engineering (EE) Exam
Electrical Engineering (EE) Exam > Electrical Engineering (EE) Notes > Signals and Systems > Z-Transform & Region of Convergence
Z-Transform & Region of Convergence | Signals and Systems - Electrical Engineering (EE) PDF Download
Objectives:
Scope of this lecture:
We have already seen the implementation of Fourier Transform and Laplace Transform for the study of Continuous Time (C.T.) signals and systems. Now our interest lies in frequency domain analysis and design of Discrete Time (D.T.) signals and systems. The ZTransform provides a valuable technique for frequency domain analysis of D.T. signals and design of DT-LTI systems. Further ZTransform offers an extremely convenient and compact way to describe digital signals and processors. Numerical problems are presented for a better understanding of the relevant concepts involved.
- We shall look at the definition of Z-transform .
- The need to consider Region of Convergence (ROC) with suitable illustrations
- The nature of ROC's in both Laplace Transform and Z-transform Domains..
Z-transform
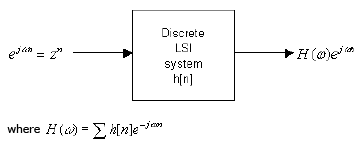
The response of a linear time-invariant system with impulse response h[n] to a complex exponential input of the form can be represented in the following way :
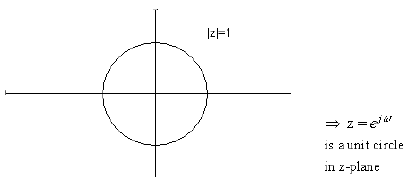
In the complex z-plane , we take a circle with unit radius centered at the origin.
H(w) is periodic with period with respect to ' w ' .
When we replace z by ejω ,we get periodicity of  in the form of a circle.
in the form of a circle.
Nature of Region of Convergence
Laplace Transform:
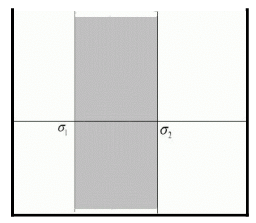
The ROC of the Laplace transform X(s) of a two-sided signal lies between two vertical lines in the s-plane.
 depend only on real part of s. For a right-sided signal
depend only on real part of s. For a right-sided signal  and the corresponding ROC is referred to as right-half plane. Similarly for a left-sided signal
and the corresponding ROC is referred to as right-half plane. Similarly for a left-sided signal  This ROC is referred to as left-half plane. When x(t) is two-sided i.e; of infinite extent for both t > 0 and t < 0 ; both and are finite and the ROC thus turns out to be a vertical strip in the s-plane.
This ROC is referred to as left-half plane. When x(t) is two-sided i.e; of infinite extent for both t > 0 and t < 0 ; both and are finite and the ROC thus turns out to be a vertical strip in the s-plane.
Z-transform:
The ROC of X(z) of a two sided signal consists of a ring in the z-plane centered about the origin.
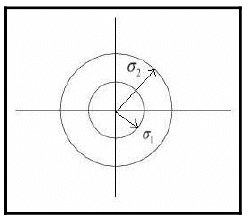
depend only on magnitude of z. As in the case of Laplace transform for a right-sided sequence and
a right-sided sequence and  for aleft -sided sequence. If x[n] is two-sided ;the ROC will consist of a ring with both and finite and non-zero.
for aleft -sided sequence. If x[n] is two-sided ;the ROC will consist of a ring with both and finite and non-zero.
The document Z-Transform & Region of Convergence | Signals and Systems - Electrical Engineering (EE) is a part of the Electrical Engineering (EE) Course Signals and Systems.
All you need of Electrical Engineering (EE) at this link: Electrical Engineering (EE)
|
42 videos|53 docs|33 tests
|



FAQs on Z-Transform & Region of Convergence - Signals and Systems - Electrical Engineering (EE)
| 1. What is the Z-transform and how is it related to the region of convergence? |  |
| 2. Why is the region of convergence important in Z-transform analysis? | |
The region of convergence (ROC) is crucial in Z-transform analysis as it provides information about the stability and causality of the system.
1. Stability: The ROC determines whether a system is stable or not. If the ROC includes the unit circle in the Z-plane, the system is stable. On the other hand, if the ROC lies outside the unit circle, the system is unstable.
2. Causality: The ROC also indicates the causality of the system. If the ROC includes the exterior of a certain radius in the Z-plane, the system is causal, meaning the output depends only on the current and past inputs. If the ROC includes the interior of a certain radius, the system is non-causal, meaning the output depends on future inputs as well.
By analyzing the ROC, engineers can determine the stability and causality properties of the system and make informed decisions for system design and analysis.
| 3. What are the different types of region of convergence in Z-transform analysis? | |
In Z-transform analysis, the region of convergence (ROC) can be classified into three main types:
1. Inside the unit circle: This type of ROC includes all the points inside the unit circle in the Z-plane. It represents stable and causal systems. The boundedness of the Z-transform within the unit circle ensures the stability of the system.
2. Outside the unit circle: This type of ROC includes all the points outside the unit circle. It represents unstable systems. The unboundedness of the Z-transform outside the unit circle indicates the instability of the system.
3. On the unit circle: This type of ROC includes points on the unit circle. It represents marginal stability. The Z-transform is bounded on the unit circle but not inside or outside it, indicating a borderline stability condition.
The type of ROC determines the stability and causality properties of the system and plays a vital role in system analysis and design.
| 4. How does the region of convergence affect the frequency response of a system? | |
The region of convergence (ROC) influences the frequency response of a system represented by the Z-transform. The frequency response describes how the system alters the input signal's frequency components.
The ROC determines the range of frequencies for which the system's frequency response is valid. For frequencies within the ROC, the frequency response can be obtained by evaluating the Z-transform on the unit circle. If the ROC includes the unit circle, the frequency response is well-defined and stable. However, if the ROC is outside the unit circle, the frequency response is undefined, indicating an unstable system.
In summary, the ROC restricts the valid range of frequencies for which the frequency response can be calculated, providing insights into the system's stability and behavior.
| 5. Can the region of convergence change for different signals in the same system? | |
Yes, the region of convergence (ROC) can vary for different signals within the same system. The ROC is signal-dependent and can change based on the characteristics of the input signal.
For a given system, the ROC represents the set of complex numbers for which the Z-transform converges. Different input signals may lead to different convergence properties, resulting in varying ROCs.
It is possible for a system to have multiple ROCs corresponding to different input signals. These ROCs can have different shapes and locations in the Z-plane, indicating different stability and causality properties for each input signal.
In practice, engineers analyze the ROC for various input signals to understand the system's behavior under different conditions and ensure its desired performance.
About this Document

4.81/5
Rating

Apr 22, 2025
Last updated
Document Description: Z-Transform & Region of Convergence for Electrical Engineering (EE) 2025 is part of Signals and Systems preparation.
The notes and questions for Z-Transform & Region of Convergence have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Z-Transform & Region of Convergence covers topics
like and Z-Transform & Region of Convergence Example, for Electrical Engineering (EE) 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Z-Transform & Region of Convergence.
Introduction of Z-Transform & Region of Convergence in English is available as part of our Signals and Systems
for Electrical Engineering (EE) & Z-Transform & Region of Convergence in Hindi for Signals and Systems course.
Download more important topics related with notes, lectures and mock test series for Electrical Engineering (EE)
Exam by signing up for free. Electrical Engineering (EE): Z-Transform & Region of Convergence | Signals and Systems - Electrical Engineering (EE)
Description
Full syllabus notes, lecture & questions for Z-Transform & Region of Convergence | Signals and Systems - Electrical Engineering (EE) - Electrical Engineering (EE) | Plus excerises question with solution to help you revise complete syllabus for Signals and Systems | Best notes, free PDF download
Information about Z-Transform & Region of Convergence
In this doc you can find the meaning of Z-Transform & Region of Convergence defined & explained in the simplest way possible. Besides explaining types of
Z-Transform & Region of Convergence theory, EduRev gives you an ample number of questions to practice Z-Transform & Region of Convergence tests, examples and also practice Electrical Engineering (EE)
tests

Related Searches
Summary
,Free
,Z-Transform & Region of Convergence | Signals and Systems - Electrical Engineering (EE)
,Extra Questions
,ppt
,mock tests for examination
,Z-Transform & Region of Convergence | Signals and Systems - Electrical Engineering (EE)
,practice quizzes
,Semester Notes
,past year papers
,Z-Transform & Region of Convergence | Signals and Systems - Electrical Engineering (EE)
,MCQs
,study material
,Exam
,shortcuts and tricks
,video lectures
,Previous Year Questions with Solutions
,Important questions
,Viva Questions
,Sample Paper
,Objective type Questions
;


Additional Information about Z-Transform & Region of Convergence for Electrical Engineering (EE) Preparation
Z-Transform & Region of Convergence Free PDF Download
The Z-Transform & Region of Convergence is an invaluable resource that delves deep into the core of the Electrical Engineering (EE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Z-Transform & Region of Convergence now and kickstart your journey towards success in the Electrical Engineering (EE) exam.
Importance of Z-Transform & Region of Convergence
The importance of Z-Transform & Region of Convergence cannot be overstated, especially for Electrical Engineering (EE) aspirants.
This document holds the key to success in the Electrical Engineering (EE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Z-Transform & Region of Convergence Notes
Z-Transform & Region of Convergence Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Z-Transform & Region of Convergence.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Z-Transform & Region of Convergence Notes on EduRev are your ultimate resource for success.
Z-Transform & Region of Convergence Electrical Engineering (EE) Questions
The "Z-Transform & Region of Convergence Electrical Engineering (EE) Questions" guide is a valuable resource for all aspiring students preparing for the
Electrical Engineering (EE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Z-Transform & Region of Convergence on the App
Students of Electrical Engineering (EE) can study Z-Transform & Region of Convergence alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Z-Transform & Region of Convergence,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Z-Transform & Region of Convergence is prepared as per the latest Electrical Engineering (EE) syllabus.
|
© EduRev
|
Education Revolution
|



|






Signup on EduRev and stay on top of your study goals
10M+ students crushing their study goals daily