Harmonics in Induction Machines | Electrical Machines - Electrical Engineering (EE) PDF Download
| Table of contents |
|
| Harmonics in Induction Machines |
|
| Time Harmonics |
|
| Space Harmonics |
|
| Effects of Space Harmonics |
|

Harmonics in Induction Machines
In attempting to understand the performance of an induction machine, we consider that the air-gap flux wave is purely sinusoidal. It is from that assumption the analysis of induced emf, sinusoidal currents, the expressions for generated torque etc. proceed. In practice, there are deviations from this idealistic picture.Time Harmonics
The first non-ideality is the presence of harmonics in the input supply given to the three phase machine.
The source may contain 3rd, 5th, 7th. . . harmonics. Note that due to the symmetry of the waveform (f (t) = −f (t + T /2), where T is the period of the supply sine waveform, even ordered harmonics cannot exist. Let the R phase supply voltage be given by the expression

Being a balanced three phase supply, we know that the waveforms of vY and vB are 120◦ and 240◦ shifted from vR respectively. It is further well known that if a waveform is shifted by φ degrees, its harmonics are shifted by nφ degrees, where n is the order of the harmonic.
Thus the expressions for vY and vB would be


If we consider the third harmonic components of the three phase waveforms, and if vx3(t) is the third harmonic of phase x, we can see that
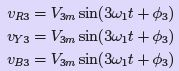
Therefore, all the three third harmonics are in phase. In a STAR connected system with isolated neutral, these voltages cannot cause any current flow since all three terminals are equal in potential. If the neutral point is connected to some point, then then current can flow through the neutral connection. Such a connection is however rare in induction machines.
The machine is therefore an open circuit to third harmonics. In fact, one can see that any harmonic whose order is a multiple of three, i.e., the triplen harmonics, as they are called, will face an identical situation. Since the machine is an open circuit to triplen harmonics in the excitation voltage, these do not have effect on the machine.
Let us now consider the fifth harmonic. From the equations above, one can see that
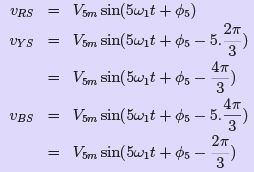
From eqns. 29 we see that the fifth harmonic of the excitation forms a negative sequence system — B phase lags R by 120◦ and Y phase lags R by 120◦.
The MMF caused by a negative sequence excitation causes backward revolving flux pattern (compared to the direction of the fundamental). The torque which it generates will act as an opposing torque to that generated by the fundamental.
Looking at the seventh harmonic, we can see that
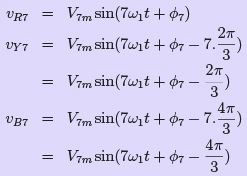
From eqns. 30, it is evident that the seventh harmonic components of the excitation form a positive sequence system. The torque produced by these currents will therefore be additive with respect to the fundamental component’s torque.
The actual effect of these harmonics on the induction machine would depend on the reactance of the machine since at high frequencies, it is the reactance component that dominates the inductance. Excitation voltage waveforms with considerable harmonic content may result when induction machines are controlled through inverters. Apart from the effects on torque, these harmonics cause considerable heating in the machine and are hence a cause for concern. These harmonics are called time harmonics since they are generated by a source that varies non-sinusoidally in time.
Space Harmonics
Apart from this, there is another kind of harmonic generated in machines called space harmonic. To understand that this behaviour, it is necessary to consider MMF/flux production in the machine. It may not be out of place to recall once again that in all our foregoing analysis we have assumed that both air-gap mmf and flux are sinusoidally distributed in space.
Let us consider a single full-pitched coil excited by a sinusoidal voltage. The current flowing through it is sinusoidal and hence the time variation of the mmf produced by it is sinusoidal. But if we travel around the span of the coil, the MMF variation that we would encounter is square. It is the amplitude of this square wave that varies sinusoidally in time.
The behaviour is depicted diagrammatically in fig. 36.
Let one more coil be connected in series to this, which is spatially displaced by the slot angle. This is shown in fig. 37. The same current passes through both and hence the mmf pattern generated by both would vary in tandem. However, they will be displaced by a slot angle as far as spatial distribution is concerned. The resulting situation is also shown in fig. 37 at a particular time instant. It can be seen that the resultant mmf waveform a non-sinusoidal function of the space angle θ. The harmonics are functions of the space angle.
These are called space harmonics.
Effects of Space Harmonics
Let the net flux waveform as a function of angle at an instant of time when unit current flows in the coils be described by f (θ). Clearly f (θ) is a periodic function of θ with a period equal to 2π. Therefore one may express this as a fourier series. If fA(θ) is the distribution function for phase A,

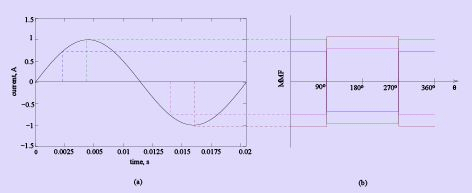
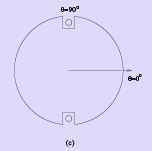
Figure 36: Coil MMF with sinusoidal excitation
The distribution functions for phases B & C will be displaced from that of A phase by 120◦ and 240◦ respectively and hence are given by

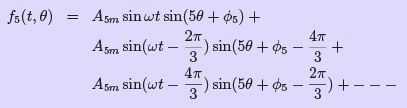
Note that we have written these at a given instant of time when unit current flows. We know that this current variation is sinusoidal in time. Considering the fifth harmonic, let the resultant fifth harmonic variation is given by,
 (34)
(34)
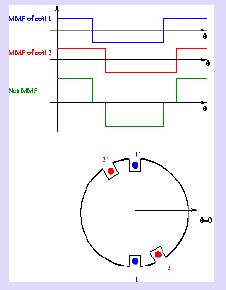
Figure 37: MMF in a distributed winding in two slots
Upon simplification, we get
 (35)
(35)
Consider the behaviour of this function. At t=0, the function a value of  at θ =0. Now let
at θ =0. Now let  At this instant, we find that the function reaches a value at
At this instant, we find that the function reaches a value at
 In other words the function f5 (t, θ) has shifted by an angle which is a fifth of the value of ωt, in the negative direction. The fifth harmonic therefore rotates opposite to the direction of the fundamental at a speed which is one-fifth of the fundamental.
In other words the function f5 (t, θ) has shifted by an angle which is a fifth of the value of ωt, in the negative direction. The fifth harmonic therefore rotates opposite to the direction of the fundamental at a speed which is one-fifth of the fundamental.
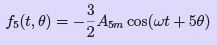
Similarly, if we consider the seventh harmonic, it can be shown that the resultant distribution is
 (36)
(36)
By similar arguments as above we conclude that the seventh space harmonic rotates in the same direction as that of the fundamental at one seventh the speed. In general , we may have harmonics of the order h = 6n±1, where n is an integer greater than or equal to 1. Harmonics orders generated by the addition operation move in the same direction as the fundamental and those generated by the subtraction operation move in the opposite direction. The speed of rotation is ω1/h, where ω1, is the synchronous speed of the fundamental.
The space harmonics, it may be noticed are a result of non-sinusoidal distribution of the coils in the machine and slotting. These have their effects on the speed torque current of the machine. An example speed-torque characteristic of an induction machine is compared with its ideal characteristic in fig. 38. The effect of 5th , 7th , 11th and 13th harmonics have been considered. It can be seen that these harmonics result in kinks in the speed-torque characteristic near starting region.
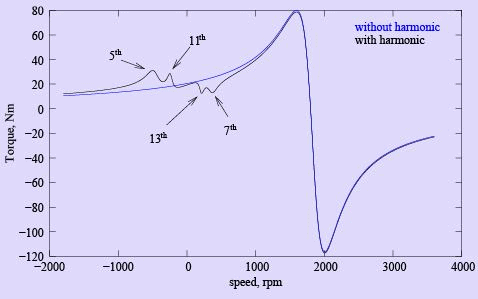
Figure 38: Ideal and actual speed-torque curves
To understand the effect of these kinks, consider fig. 39, which shows the same speed torque characteristic in the motoring region. A load characteristic is also shown, which intersects the machine characteristic at various points. Note that point 1 is stable and hence the machine would have a tendency to operate there, though the intended operating point might be point 5. This tendency is referred to as craw ling. A momentary reduction in load torque conditions might accelerate the machine to print 2, which is unstable. The operating point would then settle down at 3. The intended operating point may be reached if favourable torque variations are there.
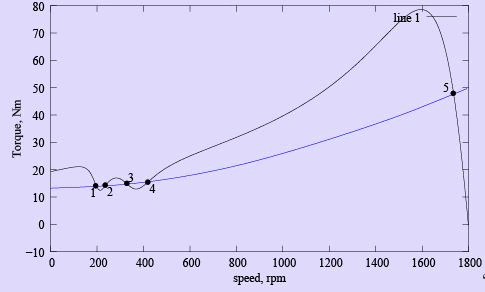
Figure 39: Effect of harmonics on loaded machine
|
19 videos|122 docs|25 tests
|
FAQs on Harmonics in Induction Machines - Electrical Machines - Electrical Engineering (EE)
| 1. What are time harmonics in induction machines? |  |
| 2. What are space harmonics in induction machines? | |
| 3. What are the effects of space harmonics in induction machines? | |
| 4. How do time harmonics impact the operation of induction machines? | |
| 5. How can space harmonics be mitigated in induction machines? | |



Objective type Questions
,Summary
,Sample Paper
,shortcuts and tricks
,Semester Notes
,Extra Questions
,mock tests for examination
,past year papers
,Previous Year Questions with Solutions
,practice quizzes
,study material
,MCQs
,Exam
,Important questions
,Viva Questions
,Harmonics in Induction Machines | Electrical Machines - Electrical Engineering (EE)
,Free
,video lectures
,Harmonics in Induction Machines | Electrical Machines - Electrical Engineering (EE)
,Harmonics in Induction Machines | Electrical Machines - Electrical Engineering (EE)
,ppt
;


Harmonics in Induction Machines Free PDF Download
Importance of Harmonics in Induction Machines
Harmonics in Induction Machines Notes
Harmonics in Induction Machines Electrical Engineering (EE) Questions
Study Harmonics in Induction Machines on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!