Best Study Material for Electrical Engineering (EE) Exam
Electrical Engineering (EE) Exam > Electrical Engineering (EE) Notes > Signals and Systems > Previous Year Questions- Introduction of C.T. and D.T. Signals
Previous Year Questions- Introduction of C.T. and D.T. Signals | Signals and Systems - Electrical Engineering (EE) PDF Download
Q1: If the energy of a continuous-time signal x(t) is E and the energy of the signal 2x(2t − 1) is cE, then c is ______ (rounded off to 1 decimal place). (2024)
(a) 1.2
(b) 2
(c) 2.6
(d) 3.2
Ans: (b)
Sol: 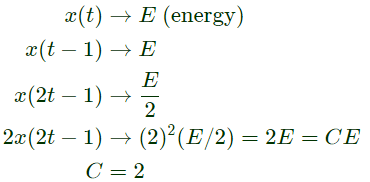
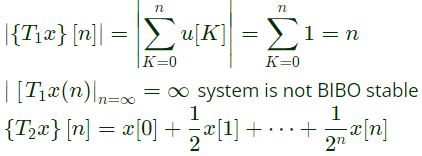
Q2: Consider the discrete-time system T1 and T2 defined as follows: Which one of the following statement is true? (2024)
Which one of the following statement is true? (2024)
(a) T1 and T2 are BIBO stable.
(b) T1 and T2 are not BIBO stable.
(c) T1 is BIBO stable butT2 is not BIBO stable.
(d) T1 is not BIBO stable but T2 is BIBO stable.
Ans: (d)
Sol:  Let,
Let,
 Let,
Let,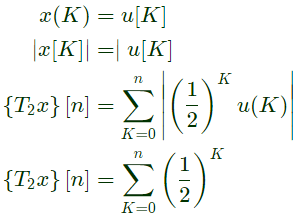
 T1 is not BIBO stable but T2 is BIBO stable.
T1 is not BIBO stable but T2 is BIBO stable.
Q3: Suppose signal y(t) is obtained by the time-reversal of signal x(t), i.e., y(t) = x(−t), -∞
ltt
lt∞. Which one of the following options is always true for the convolution of x(t) and y(t) ? (2024)
(a) It is an even signal.
(b) It is an odd signal.
(c) It is a causal signal.
(d) It is an anti-causal signal.
Ans: (a)
Sol:  even function.
even function.
Q4: The period of the discrete-time signal x[n] described by the equation below is N = ___ (Round off to the nearest integer). (2023) (a) 16
(a) 16
(b) 32
(c) 48
(d) 64
Ans: (c)
Sol: Given :




Q5: For the signals x(t) and y(t) shown in the figure, z(t) = x(t) ∗ y(t) is maximum at t = T1. Then T1 in seconds is (Round off to the nearest integer). (2023) (a) 2
(a) 2
(b) 3
(c) 4
(d) 5
Ans: (c)
Sol: Using convotution property
z(t) = x(t) ∗ y(t)
 For max. overlap
For max. overlap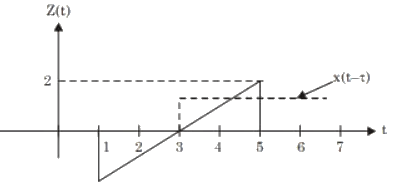
Q6: Two discrete-time linear time-invariant systems with impulse responses h1[n] = δ[n − 1] + δ[n + 1] and h2[n] = δ[n] + δ[n − 1] are connected in cascade, where δ[n] is the Kronecker delta. The impulse response of the cascaded system is (2021)
(a) δ[n − 2] + δ[n + 1]
(b) δ[n − 1]δ[n] + δ[n + 1]δ[n − 1]
(c) δ[n − 2] + δ[n − 1] + δ[n] + δ[n + 1]
(d) δ[n] δ[n − 1] + δ[n − 2] δ[n + 1]
Ans: (c)
Sol:  By applying z -transform
By applying z -transform By applying inverse ZT,
By applying inverse ZT,
Q7: Suppose for input x(t) a linear time-invariant system with impulse response h(t) produces output y(t), so that x(t) ∗ h(t) = y(t). Further, if x(t)∣ ∗ ∣h(t)∣ = z(t), which of the following statements is true? (2020)
(a) For all t ∈ (−∞, ∞), z(t) ≤ y(t)
(b) For some but not all t ∈ (−∞, ∞), z(t) ≤ y(t)
(c) For all t ∈ (−∞, ∞), z(t) ≥ y(t)
(d) For some but not all t ∈ (−∞, ∞), z(t) ≥ y(t)
Ans: (c)
Sol:  Case-1:
Case-1: case 2:
case 2: then, y(t) = z(t)
then, y(t) = z(t) Thus, z(t) ≥ y(t), for all ’t’ .
Thus, z(t) ≥ y(t), for all ’t’ .
Q8: The symbols, a and T, represent positive quantities, and u(t) is the unit step function. Which one of the following impulse responses is NOT the output of a causal linear time-invariant system? (2019)
(a) e+atu(t)
(b) e−a(t+T)u(t)
(c) 1+e−atu(t)
(d) e−a(t−T)u(t)
Ans: (c)
Sol: a and T represents positive quantities.
u(t) is unit step function.
h(t) = 1+e−atu(t), is non-causal
Here '1' is a constant and two sided so the system will be non-causal, because for causal system,
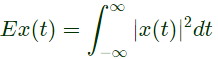
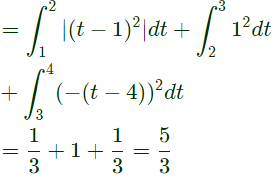
Q9: The signal energy of the continuous-time signal x(t) = [(t − 1)u(t − 1)] − [(t − 2)u(t − 2)] − [(t − 3)u(t − 3)] + [(t − 4)u(t − 4)] is (2018)
(a) 11/3
(b) 7/3
(c) 1/3
(d) 5/3
Ans: (d)
Sol: x(t) = r(t − 1) − r(t − 2) − r(t − 3) + r(t − 4)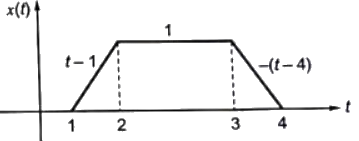
Q10: The mean square value of the given periodic waveform f(t) is_________ (SET-2 (2017)) (a) 12
(a) 12
(b) 24
(c) 6
(d) 3
Ans: (c)
Sol: Mean square value = power of f(t)
Mean square value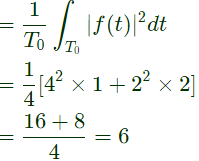
Q11: Consider the system with following input-output relation y[n] = (1 + (−1)n)x[n] where, x[n] is the input and y[n] is the output. The system is (SET-1 (2017))
(a) invertible and time invariant
(b) invertible and time varying
(c) non-invertible and time invariant
(d) non-invertible and time varying
Ans: (d)
Sol: Given relationship,
y(n) = [1+(−1)n]x(n)
Time invariance test:  Since, y(n−1) ≠ y′(n)
Since, y(n−1) ≠ y′(n)
So, the system is time invariant.
Invertibility test: Thus, we are getting many to one mapping between input and output. So, the system is non-invertible.
Thus, we are getting many to one mapping between input and output. So, the system is non-invertible.
Q12: The value of  is the Dirac delta function, is (SET-1 (2016))
is the Dirac delta function, is (SET-1 (2016))
(a) 1/2e
(b) 2/e
(c) 1/e2
(d) 1/2e2
Ans: (a)
Sol: To find the value of 
Since,  above integral can be written as
above integral can be written as
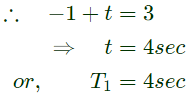
Q13: The function shown in the figure can be represented as (SET-1 (2014)) (a)
(a) 
(b) 
(c) 
(d) 
Ans: (a)
Sol:  The given function can be realized as follow:
The given function can be realized as follow: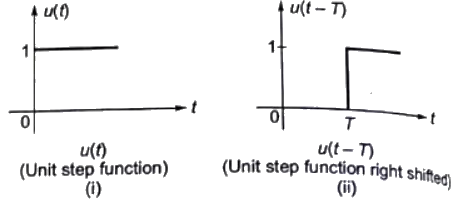
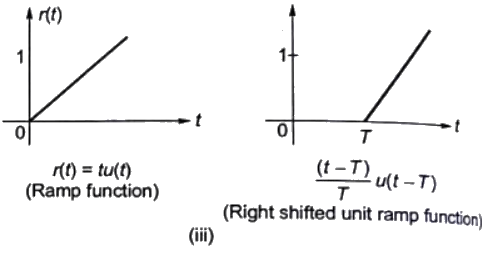
 Combining the function (i0, (ii), (iii) and (iv), we get the given function
Combining the function (i0, (ii), (iii) and (iv), we get the given function Therefore,
Therefore,
Q14: A zero mean random signal is uniformly distributed between limits -a and +a and its mean square value is equal to its variance. Then the r.m.s value of the signal is (2011)
(a) a/√3
(b) a/√2
(c) a√2
(d) a√3
Ans: (a)
Q15: Given a sequence x[n], to generate the sequence y[n] = x[3 - 4n], which one of the following procedures would be correct ? (2008)
(a) First delay x[n] by 3 samples to generate z1[n], then pick every 4th sample of z1[n] to generate z2[n], and than finally time reverse z2[n] to obtain y[n].
(b) First advance x[n] by 3 samples to generate z1[n], then pick every 4th sample of z1[n] to generate z2[n], and then finally time reverse z2[n] to obtain y[n]
(c) First pick every fourth sample of x[n] to generate v1[n], time-reverse v1[n] to obtain v2[n], and finally advance v2[n] by 3 samples to obtain y[n]
(d) First pick every fourth sample of x[n] to generate v1[n], time-reverse v1[n] to obtain v2[n], and finally delay v2[n] by 3 samples to obtain y[n]
Ans: (b)
Sol: y[n] = x[3 − 4n] = x[−4n + 3]
So to obtain y[n], we first advance x[n] by 3 unit.
i.e. z1[n] = x[n + 3]
Now we will take every fourth sample of z1[n]
i.e. z2[n] = z1[4n] = x[4n + 3]
Now reverse (time reverse) z2[n] will give
y[n] = z2[−n] = x[−4n + 3]
Q16: A continuous-time system is described by y(t) = e−∣x(t)∣, where y(t) is the output and x(t) is the input. y(t) is bounded (2006)
(a) only when x(t) is bounded
(b) only when x(t) is non-negative
(c) only for t ≥ 0 if x(t) is bounded for t ≥ 0
(d) even when x(t) is not bounded
Ans: (d)
Q17: Which of the following is true? (2006)
(a) A finite signal is always time bounded
(b) A time bounded signal always possesses finite energy
(c) A bounded signal is always zero outside the interval [−t0, t0 ] for some t0
(d) A time bounded signal is always finite
Ans: (d)
Q18: What is the rms value of the voltage waveform shown in figure? (2002) (a) (200/π) V
(a) (200/π) V
(b) (100/π) V
(c) 200V
(d) 100V
Ans: (d)
Sol: RMS value
Q19: A current impulse 5δ(t), is forced through a capacitor C. The voltage Vc(t), across the capacitor is given by (2002)
(a) 5t
(b) 5u(t) - C
(c) (5/C) (t)
(d) 5u(t)/C
Ans: (d)
Sol: 
The document Previous Year Questions- Introduction of C.T. and D.T. Signals | Signals and Systems - Electrical Engineering (EE) is a part of the Electrical Engineering (EE) Course Signals and Systems.
All you need of Electrical Engineering (EE) at this link: Electrical Engineering (EE)
|
42 videos|53 docs|33 tests
|


FAQs on Previous Year Questions- Introduction of C.T. and D.T. Signals - Signals and Systems - Electrical Engineering (EE)
| 1. What is the difference between continuous-time (C.T.) and discrete-time (D.T.) signals? |  |
| 2. How are continuous-time signals represented mathematically compared to discrete-time signals? | |
Ans. Continuous-time signals are represented by mathematical functions of time, while discrete-time signals are represented by sequences of values at discrete time instances.
| 3. Can continuous-time signals be converted to discrete-time signals and vice versa? | |
Ans. Yes, continuous-time signals can be sampled to obtain discrete-time signals, and discrete-time signals can be interpolated to obtain continuous-time signals.
| 4. What are some examples of continuous-time and discrete-time signals commonly encountered in electrical engineering? | |
Ans. Examples of continuous-time signals include sine waves, cosine waves, and exponential functions. Examples of discrete-time signals include sequences of numbers such as digital audio samples or sensor readings.
| 5. How are continuous-time and discrete-time signals processed differently in signal processing applications? | |
Ans. Continuous-time signals are typically processed using analog signal processing techniques, while discrete-time signals are processed using digital signal processing techniques involving sampling, quantization, and filtering.
Related Exams
About this Document

4.89/5
Rating

Apr 25, 2025
Last updated
Document Description: Previous Year Questions- Introduction of C.T. and D.T. Signals for Electrical Engineering (EE) 2025 is part of Signals and Systems preparation.
The notes and questions for Previous Year Questions- Introduction of C.T. and D.T. Signals have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Previous Year Questions- Introduction of C.T. and D.T. Signals covers topics
like and Previous Year Questions- Introduction of C.T. and D.T. Signals Example, for Electrical Engineering (EE) 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Previous Year Questions- Introduction of C.T. and D.T. Signals.
Introduction of Previous Year Questions- Introduction of C.T. and D.T. Signals in English is available as part of our Signals and Systems
for Electrical Engineering (EE) & Previous Year Questions- Introduction of C.T. and D.T. Signals in Hindi for Signals and Systems course.
Download more important topics related with notes, lectures and mock test series for Electrical Engineering (EE)
Exam by signing up for free. Electrical Engineering (EE): Previous Year Questions- Introduction of C.T. and D.T. Signals | Signals and Systems - Electrical Engineering (EE)
Description
Full syllabus notes, lecture & questions for Previous Year Questions- Introduction of C.T. and D.T. Signals | Signals and Systems - Electrical Engineering (EE) - Electrical Engineering (EE) | Plus excerises question with solution to help you revise complete syllabus for Signals and Systems | Best notes, free PDF download
Information about Previous Year Questions- Introduction of C.T. and D.T. Signals
In this doc you can find the meaning of Previous Year Questions- Introduction of C.T. and D.T. Signals defined & explained in the simplest way possible. Besides explaining types of
Previous Year Questions- Introduction of C.T. and D.T. Signals theory, EduRev gives you an ample number of questions to practice Previous Year Questions- Introduction of C.T. and D.T. Signals tests, examples and also practice Electrical Engineering (EE)
tests

Related Searches
practice quizzes
,study material
,past year papers
,Previous Year Questions with Solutions
,shortcuts and tricks
,MCQs
,Important questions
,video lectures
,Viva Questions
,ppt
,Summary
,Objective type Questions
,Free
,Semester Notes
,Extra Questions
,Previous Year Questions- Introduction of C.T. and D.T. Signals | Signals and Systems - Electrical Engineering (EE)
,mock tests for examination
,Sample Paper
,Exam
,Previous Year Questions- Introduction of C.T. and D.T. Signals | Signals and Systems - Electrical Engineering (EE)
,Previous Year Questions- Introduction of C.T. and D.T. Signals | Signals and Systems - Electrical Engineering (EE)
;






Additional Information about Previous Year Questions- Introduction of C.T. and D.T. Signals for Electrical Engineering (EE) Preparation
Previous Year Questions- Introduction of C.T. and D.T. Signals Free PDF Download
The Previous Year Questions- Introduction of C.T. and D.T. Signals is an invaluable resource that delves deep into the core of the Electrical Engineering (EE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Previous Year Questions- Introduction of C.T. and D.T. Signals now and kickstart your journey towards success in the Electrical Engineering (EE) exam.
Importance of Previous Year Questions- Introduction of C.T. and D.T. Signals
The importance of Previous Year Questions- Introduction of C.T. and D.T. Signals cannot be overstated, especially for Electrical Engineering (EE) aspirants.
This document holds the key to success in the Electrical Engineering (EE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Previous Year Questions- Introduction of C.T. and D.T. Signals Notes
Previous Year Questions- Introduction of C.T. and D.T. Signals Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Previous Year Questions- Introduction of C.T. and D.T. Signals.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Previous Year Questions- Introduction of C.T. and D.T. Signals Notes on EduRev are your ultimate resource for success.
Previous Year Questions- Introduction of C.T. and D.T. Signals Electrical Engineering (EE)
The "Previous Year Questions- Introduction of C.T. and D.T. Signals Electrical Engineering (EE) Questions" guide is a valuable resource for all aspiring students preparing for the
Electrical Engineering (EE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Previous Year Questions- Introduction of C.T. and D.T. Signals on the App
Students of Electrical Engineering (EE) can study Previous Year Questions- Introduction of C.T. and D.T. Signals alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Previous Year Questions- Introduction of C.T. and D.T. Signals,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Previous Year Questions- Introduction of C.T. and D.T. Signals is prepared as per the latest Electrical Engineering (EE) syllabus.
|
© EduRev
|
Education Revolution
|



|










Signup to see your scores
go up within 7 days!
Access 1000+ FREE Docs, Videos and Tests
Takes less than 10 seconds to signup